

Типовые нелинейные элементы системы управления
Структура и уравнение нелинейной автоматической системы в общем случае могут быть очень сложными. Степень сложности зависит от количества, вида и места включения нелинейных элементов. Однако, большинство реальных систем содержит один существенно нелинейный элемент. Линейная часть
включает в себя все линейные звенья системы и может иметь структуру любой сложности, в частности,
содержит внутренние обратные связи. Как уже отмечалось выше, нелинейные свойства системы определяются наличием в ней статических нелинейностей, т.е. нелинейная часть, образованная одним нелинейным элементом, имеет выходную переменную y нэ , которая в наиболее общем случае выражается как функция входной величины x и ее производной x′ :
![]() (10.1.1)
(10.1.1)
Простейшими нелинейными элементами являются статические нелинейности, у которых выходная переменная зависит только от входной переменной, причем, эта зависимость строго однозначна: y нэ = f(x) . Такие нелинейности называются типовыми, для них записывается статическая характеристика и рассматривается преобразование ими гармонического сигнала x( t) =Asin ωt . Наиболее часто встречаются следующие типовые нелинейности.
1 Усилительное звено с зоной нечувствительности. Статическая характеристика этого звена представлена на рис. 10.1.4, а. Такими характеристиками обладают некоторые схемы электронных, магнитных и
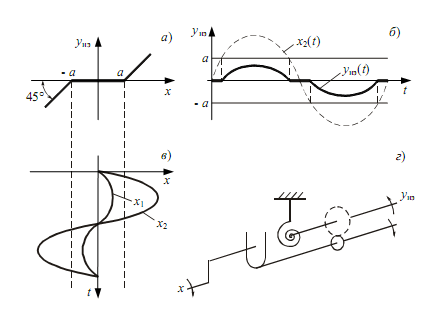
Рисунок 10.1.4 - Звено с зоной нечувствительности:
а – статическая характеристика; б – прохождение гармонического сигнала;
в – входной сигнал; г – механическая модель
гидравлических усилителей в области малых входных сигналов. Простейшей механической моделью зоны нечувствительности является система соединения двух валов с пружинным возвратом ведомого вала в нейтральное положение при наличии участка свободного хода в системе передачи (рис. 10.1.4, г).
Статическая характеристика звена (рис. 10.1.4, а) выражается следующими уравнениями
 (10.1.2)
(10.1.2)
При подаче на вход звена гармонического сигнала x1(t) (рис. 10.1.4, в) с амплитудой A ≤ a , на выходе звена сигнала не будет, так как изменение x1 не превышает величины зоны нечувствительности. Если же на вход подать сигнал x2(t) (рис. 10.1.4, в) с амплитудой A > a , то на выходе будет наблюдаться периодический сигнал (рис. 10.1.4, б), который может быть построен по рис. 10.1.4, а, в, как третья проекция. Если x2(t) ≤a,то y нэ(t)=0 , если x2(t) >a, то y нэ(t)=0 то выходной сигнал y нэ(t)= совпадает с верхней частью входного сигнала x2(t) . В результате на выходе усилительного звена с зоной нечувствительности будет выходной сигнал, отличный от гармонического по форме и представляющий собой участки с нулевым сигналом и сигналом, отличным от нуля.
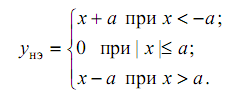
2 Усилительное звено с ограничением амплитуды. Это звено называют также нелинейным звеном с зоной насыщения. Статическая характеристика изображена на рис. 10.1.5, а и записывается в виде
 (10.1.3)
(10.1.3)
Подобными характеристиками обладают практически все реальные усилители, ограниченные по мощности в области больших входных сигналов.
Механической моделью звена является система соединения двух валов через упругую пружину при наличии ограничений или упоров в системе ведомого вала (рис. 10.1.5, г).
При подаче на вход звена гармонического сигнала сигнала x1(t) с амплитудой A< a (меньше зоны насыщения) (рис. 10.1.5, в) на выходе звена будет также гармонический сигнал, так как в этом случае звено работает как линейное (рис. 10.1.5, б). Если амплитуда входного сигнала x2(t) больше, чем зона насыщения (A > a) , то при достижении ее, т.е. как
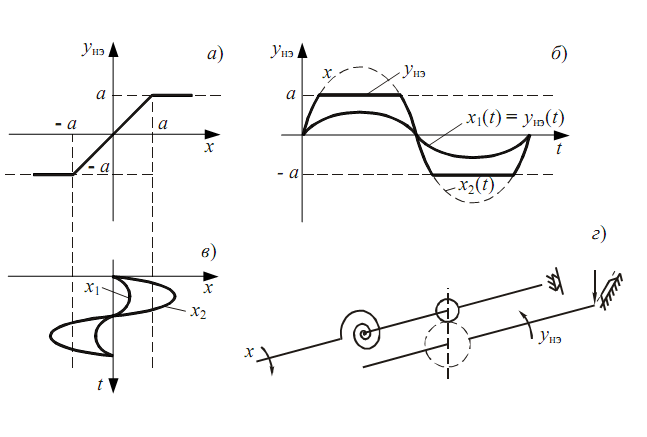
Рис. 10.1.5 Усилительное звено с ограничением амплитуды:
а – статическая характеристика; б – прохождение гармонического сигнала;
в – входной сигнал; г – механическая модель
только x2( t) = a, на выходе звена установится значение y нэ(t) = a и будет сохраняться до тех пор, пока x2( t) > a . Если же значение входного сигнала достигнет значения x2( t) = - a, то на выходе значение выходного сигнала установится равным - a , y нэ = -a и будет сохраняться, пока x2( t) < -a в диапазоне -a≤ x2( t) ≤ a . Нелинейный элемент имеет статическую характеристику y нэ =x и, следовательно, в этом случае через него пройдут отдельные участки входного гармонического сигнала. В результате на выходе усилительного звена с зоной насыщения установится периодический выходной сигнал по форме напоминающий трапеции, боковые стороны которых искривлены по синусоиде.
3 Двухпозиционное реле. Статическая характеристика звена представлена на рис. 10.6, а и записывается как
 (10.1.4)
(10.1.4)
Двухпозиционное реле представляет собой самостоятельный нелинейный физически реализуемый элемент, который используется в различных схемах сигнализации, а также для устройств специального типа, применяемых для форсирования управляющего сигнала при больших рассогласованиях между переменной и заданием.
При подаче на вход звена гармонического сигнала x(t) (рис. 10.1.6, в) на его выходе установятся прямоугольные колебания, амплитуда которых будет B при x > 0 и - B при x < 0 .
Вынужденные колебания на выходе двухпозиционного реле представлены на рис. 10.1.6, б.
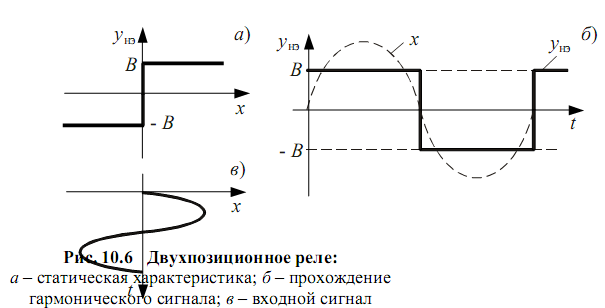
Рисунок 10.1.6 - Двухпозиционное реле:
а – статическая характеристика; б – прохождение
гармонического сигнала; в – входной сигнал
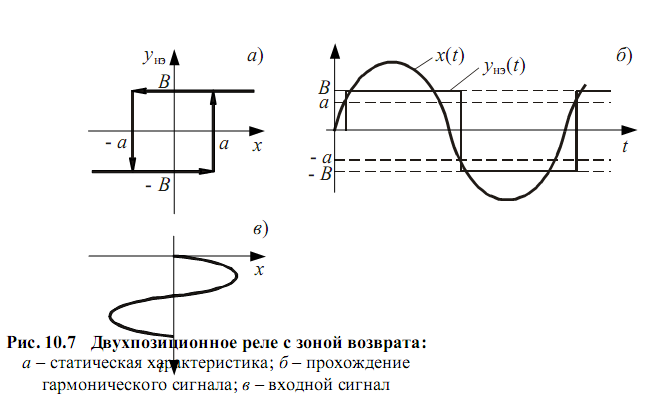
4. Двухпозиционное реле с зоной возврата. Однозначные релейные характеристики соответствуют некоторой идеализации реальной системы. В действительности обычно величина входного сигнала, при котором происходит скачок выходной величины yнэ , бывает различной для переключения контакта в прямом и обратном направлениях. Статическая характеристика двухпозиционного реле с зоной возврата представлена на рис. 10.1.7, а и математически выражается следующим образом
 (10.1.5)
(10.1.5)
На участке −a < x< a величина y нэ имеет два значения B или B− в зависимости от предшествующих значений x . Условия скачка при переходе с нижней ветви на верхнюю выражается следующим образом:x=a,yнэ=−B, dx/dt>0.
Аналогично записываются условия скачкообразного перехода с верхней ветви на нижнюю:x=−a, yнэ=B, dx/dt<0
При подаче на вход звена гармонического сигнала (рис. 10.1.7, в) на выходе звена наблюдаются прямоугольные колебания с амплитудой, равной B(рис. 10.1.7, б). Скачкообразный переход с +B на −B происходит в момент времени, когда x(t)=−a, а с −B на +B , когда x(t) =a. Свойствами подобного релейного элемента обладают усилители с зоной насыщения, охваченные положительной обратной связью. Такая нелинейная характеристика типична для двухпозиционных переключающих элементов, например, электромагнитных реле.
 Рисунок
10.1.7 - Двухпозиционное реле с зоной
возврата: а
- статическая х а
рактеристика; б – прохождение
гармонического сигнала; в - входной
сигнал yнэ(t)
Рисунок
10.1.7 - Двухпозиционное реле с зоной
возврата: а
- статическая х а
рактеристика; б – прохождение
гармонического сигнала; в - входной
сигнал yнэ(t)
5 Усилительное звено с зоной застоя (звено типа люфт). Нелинейность такого вида наиболее часто встречается в механических системах и связана с наличием зазоров или с сухим трением в системе передачи. Если в механической модели звена с зоной нечувствительности (рис. 10.1.8, г) убрать пружину, стремящуюся возвратить ведомый вал в нулевое положение, то получится модель нелинейности типа люфт (рис. 10.1.8, г). Зависимость между положением ведущего x и ведомого yнэ валов неоднозначна.
Статическая характеристика, выражающая эту зависимость, представлена на рис. 10.1.8, а.
А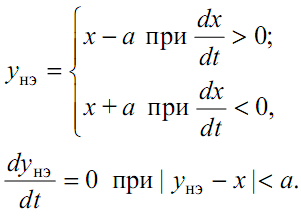 налитически
характеристика звена типа люфт
записывается следующим образом:
налитически
характеристика звена типа люфт
записывается следующим образом:
(10.1.6)
В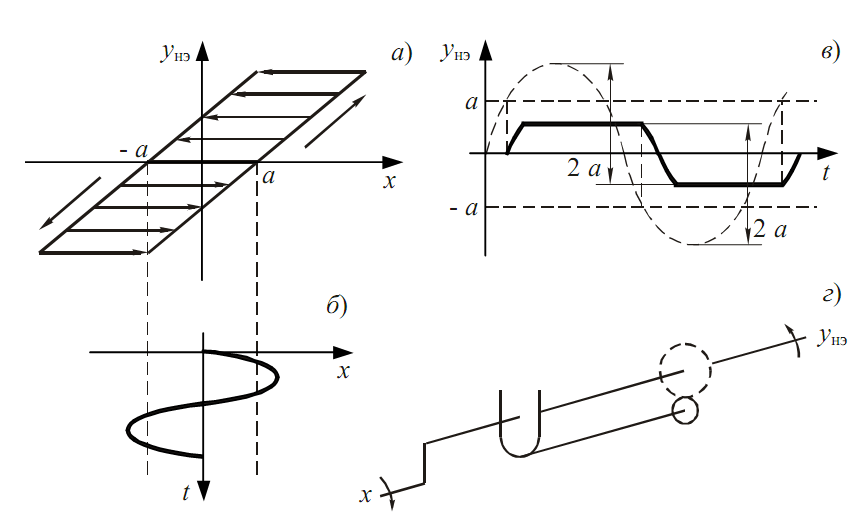 этом случае статическая характеристика
имеет гистерезисный вид и зависит не
только от значения
x(t
)
, но и от знака скорости изменения y
нэ
этом случае статическая характеристика
имеет гистерезисный вид и зависит не
только от значения
x(t
)
, но и от знака скорости изменения y
нэ
Рисунок 10.1.8 - Звено типа люфт:а - статическая характеристика; б - входной сигнал; в – прохождение гармонического сигнала; г - механическая модель
При подаче на вход гармонического сигнала x(t) (рис. 10.1.8, б) на выходе нелинейного элемента будет наблюдаться некоторый периодический процесс, представленный на рис. 10.1.8, в, для которого характерным является появление участков "зависания" yнэ, т.е. на них изменения yнэ не происходит за счет наличия сухого трения в золотнике. Однако, выходной сигнал yнэ не задерживается в зоне покоя в области нулевых значений. Это означает также, что пока входная координата не изменится настолько, чтобы она превысила значение a2 , выходная переменная не будет изменяться. Поэтому при изменении направления действия выходная переменная начнет изменяться лишь тогда, когда значение входной переменной изменится на величину, равную удвоенному параметру a (параметр a характеризует, например, сухое трение).
6 Трехпозиционное реле с зоной нечувствительности и зоной возврата. Нелинейности такого типа часто встречаются в системах автоматического регулирования, особенно, когда элементом, управляющим включением и выключением вспомогательной энергии, является электрическое реле, например, электрический сервомотор, управляемый с помощью реле.
Статическая характеристика представляет собой релейную характеристику, отличительной особенностью которой является то, что выходная переменная изменяется скачком в зависимости от изменения входного сигнала и может принимать одно из трех значений: B,0,−B. Эта характеристика изображена на рис. 10.1.9, а и является ярким примером существенно нелинейной функции. Здесь можно выделить три типичные зоны нелинейности: зону нечувствительности, участки неоднозначности и участки насыщения.
Зона нечувствительности определяется величиной тока срабатывания реле. Участки неоднозначности представляют петли, образуемые вертикальными и горизонтальными участками характеристики, а участки насыщения определяются релейным характером включения энергии.
Математическая запись статической характеристики трехпозиционного реле с зоной нечувствительности выглядит следующим образом:
B, 0, −B (10.1.7)
В этом случае переход от yнэ =0 к yнэ= B происходит при x=a , а возврат - при x=b .
П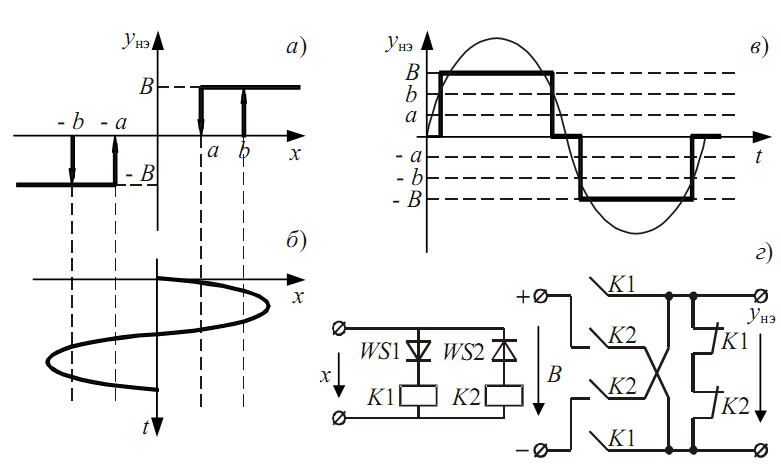 одобная
статическая характеристика может быть
получена при охвате усилителя с зоной
нечувствительности
и ограничением положительной обратной
связью. Для ее получения может быть
применена электрическая
схема (рис. 10.1.9, г), состоящая из двух
электромагнитных реле K1 и K2, включенных
через
вентили WS1 и WS2. Контакты
одобная
статическая характеристика может быть
получена при охвате усилителя с зоной
нечувствительности
и ограничением положительной обратной
связью. Для ее получения может быть
применена электрическая
схема (рис. 10.1.9, г), состоящая из двух
электромагнитных реле K1 и K2, включенных
через
вентили WS1 и WS2. Контакты
Рисунок 10.1.9 - Трехпозиционное реле с зоной нечувствительности: а - статическая характеристика; б - входной сигнал; в – прохождение гармонического сигнала; г - электрическая схема
реле K1 и K2 замыкают цепь между источником питания и напряжением B выходными зажимами так,
что в зависимости от значения x напряжение z на зажимах принимает значение−B,0,B в соответствии с характеристикой (рис. 10.1.9, а).
При подаче на вход рассматриваемого нелинейного элемента гармонического сигнала (рис. 10.1.9, б) на выходе наблюдается периодический процесс, представляющий собой чередование участков нечувствительности и прямоугольных импульсов амплитудой B или −B . Переключение реле с B на −B и наоборот с −B на B происходит с некоторым запаздыванием в силу разных значений токов срабатывания и отпусканием реле.