

Примеры моделей звеньев
В системах управления используются разнообразные физические устройства: гидравлические, электромагнитные, электрогидравлические и др. Поэтому при решении задач динамики систем приходится моделировать различные по своей природе системы управления и регулирования. Большинство из них хорошо описывается с помощью типовых линейных динамических звеньев автоматического регулирования , к которым относятся:
1) идеальное усилительное (безынерционное) звено – сумматор;
2) апериодическое звено 1-го порядка (инерционное);
3) апериодическое звено 2-го порядка;
4) колебательное звено;
4a) консервативное звено (частный случай колебательного звена);
5) идеальное интегрирующее звено;
6) инерциальное интегрирующее звено;
7) идеальное дифференцирующее звено;
8) идеальное звено с введением производной;
9) инерционное дифференцирующее звено;
10) динамическое звено 2-го порядка (общий случай).
Математические модели перечисленных линейных динамических звеньев записаны далее в виде обыкновенных дифференциальных уравнений, а не в операторной форме (в виде передаточных функций), поскольку нас интересуют переходные процессы во временной, а не в частотной области.
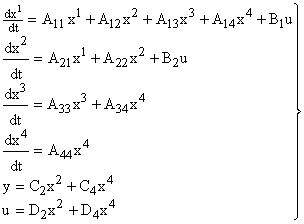
В общем случае линейное динамическое звено 2-го порядка описывается уравнением:
![]() (2.1.23)
(2.1.23)
где
![]() сигналы на входе звена;
сигналы на входе звена;
![]() их производные по времени; х – сигнал
на выходе звена;
их производные по времени; х – сигнал
на выходе звена;
![]() коэффициенты уравнения.
коэффициенты уравнения.
Для всех остальных типов динамических звеньев их уравнения получены как частные случаи (2):
идеальное усилительное (безынерционное) звено – сумматор:
![]() (2.1.24)
(2.1.24)
апериодическое звено 1-го порядка (инерционное):
![]() (2.1.25)
(2.1.25)
апериодическое звено 2-го порядка и колебательное звено:
![]() (2.1.26)
(2.1.26)
консервативное звено:
![]() (2.1.27)
(2.1.27)
идеальное интегрирующее звено:
![]() (2.1.28)
(2.1.28)
инерциальное интегрирующее звено:
![]() (2.1.29)
(2.1.29)
идеальное дифференцирующее звено:
![]() (2.1.30)
(2.1.30)
идеальное звено с введением производной:
![]() (2.1.31)
(2.1.31)
инерционное дифференцирующее звено:
![]() (2.1.32)
(2.1.32)
Таким образом, все типовые линейные звенья могут быть объединены в один обобщенный элемент ЗВЕНО (идентификатор этого элемента в библиотеке базовых элементов) с узлами i (вход), j (выход), k (дополнительный вход для звена – сумматора).
Приведенные уравнения линейных динамических звеньев следует дополнить рядом ограничений, отражающих физические свойства переменных, а также некоторые конструктивные особенности устройств (например, упоры подвижных частей).
В ряде реальных элементов перемещение z подвижных частей ограничено упорами. Такого рода нелинейности могут быть заданы в виде неравенств:

(2.1.33)
 (2.1.34)
(2.1.34)
 (2.1.35)
(2.1.35)
где
L – максимальное значение перемещения
z ; А – правая часть дифференциального
уравнения, разрешенного относительно
![]() ;
В – правая часть дифференциального
уравнения, разрешенного относительно
;
В – правая часть дифференциального
уравнения, разрешенного относительно
![]() .
.
2.2 ОБЩАЯ ХАРАКТЕРИСТИКА ЛИНЕЙНЫХ СИСТЕМ. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ, СВОЙСТВА РЕШЕНИЙ. УПРАВЛЯЕМОСТЬ, НАБЛЮДАЕМОСТЬ. УСТОЙЧИВОСТЬ. ОЦЕНКА УСТОЙЧИВОСТИ ПО КОРНЯМ ХАРАКТЕРИСТИЧЕСКОГО ПОЛИНОМА
На основе изучения многих моделей систем, можно прийти к выводу, что системы, описываемые линейными дифференциальными уравнениями, несмотря на все их многообразие, обладают весьма ограниченным числом основных свойств. Эти свойства следующие:
способность системы к усилению (ослаблению) сигнала;
способность системы к накоплению (энергии, материи);
инерционность;
прогнозируемость;
колебательность;
устойчивость;
запаздывание.
Строгого доказательства, что этот список является исчерпывающим, на сегодня не существует, но, основываясь на опыте, можно утверждать, что это так. Добавление в список некоторых свойств, например способности системы неоднократно терять и приобретать устойчивость при изменении некоторого ее параметра, не приводит к принципиальным отличиям. Исключение каких-то свойств не позволяет получить исчерпывающий список, поскольку исключаемое свойство нельзя заменить некоторой комбинацией, выразить оставленными.
Перечисленные свойства линейных систем, за исключением прогнозируемости, безусловно, хорошо известны. Они расположены в списке по мере увеличения сложности, указанные ниже основываются на предыдущих свойствах.
О прогнозируемости следует сказать отдельно. Анализ линейных систем показал, что они в той или иной мере обладают свойством, позволяющим предсказывать их поведение на некоторый, пусть небольшой, промежуток времени. Это свойство обусловлено, в том числе и инерционностью системы, опирается на него, но, тем не менее, отличается настолько, что заслуживает отдельного названия и включения в список основных свойств линейной системы. Исходя из особенностей рассматриваемого свойства, его можно назвать прогнозируемостью.
Прогнозируемость системы определяется ее инерционностью и способом приложения к ней внешних воздействий. Прогнозируемость системы или звена может быть определена количественно. Не вдаваясь в подробности, уводящие от темы настоящей работы, можно сказать, что для систем с дробно-рациональной передаточной функцией прогнозируемость звена численно может быть определена как разность числа полюсов и числа нулей его передаточной функции.
В формальной, традиционной классификации, основанной на степени дифференциального уравнения звена, звено запаздывания выпадает из классификации, поскольку описывается не дифференциальным уравнением, или, если угодно, дифференциальным уравнением бесконечной степени. Поэтому включение его в традиционный набор типовых звеньев выглядит вынужденным, натужным. Но и отказаться от такого звена, естественно, невозможно. Положив в основу классификации звеньев не формальный признак, а объективно существующую, ограниченную совокупность основных свойств линейных систем, можно избежать и этого затруднения.
Математическим аппаратом исследования САУ являются дифференциальные уравнения, которые описывают движение системы и являются уравнениями динамики. Из уравнений динамики, положив все производные равными нулю, можно получить уравнения статики, которые описывают поведение системы в установившемся режиме.
Дифференциальные уравнения САУ и ее элементов, составленные в соответствии с физическими законами их функционирования и факторами, от которых зависят переменные уравнений, практически всегда являются нелинейными. Дифференциальные уравнения САУ, записанные в виде системы уравнений или одного дифференциального уравнения высокого порядка представляют собой математическую модель системы. Математическая модель является основой для анализа свойств системы и степени их соответствия поставленным требованиям. Итак, исходная математическая модель САУ является нелинейной. Отсутствие однозначных аналитических методов решения нелинейных дифференциальных уравнений не позволяет создать какие-либо общие эффективные методы анализа и синтеза САУ. Именно это и послужило причиной развития идеи линеаризации, т.е. замены исходной нелинейной модели линейной, близкой по решению к исходной модели в определенном диапазоне изменения начальных условий и параметров. Линеаризация проводится по методу малого отклонения, который основан на разложении нелинейных функций в ряд Тейлора.
Пусть
САУ описывается дифференциальным
уравнением
 порядка.
порядка.
 (2.2.1)
(2.2.1)
В этом выражении F и F1 - некоторые нелинейные функции. Представим переменные, входящие в уравнение в следующем виде:
В этих выражениях нижний индекс “0” означает установившееся значение переменной, а знак - отклонение переменной от установившегося значения. Разложим нелинейные функции в ряд Тейлора в окрестности установившегося режима.




Индекс “*” около частных производных означает, что они вычислены в точке установившегося режима.
Допустим, что отклонения переменных от установившегося режима настолько малы, что остаточными членами, а так же членами, содержащими произведения отклонений и отклонения в степенях выше первой, можно пренебречь как бесконечно малыми высших порядков малости по сравнению с членами, содержащими отклонения в первой степени. В соответствии с этим предположениям будем полагать, что Rk=Rk1=0 и i=1.
Сделаем обозначения


C учетом сделанных предположений и обозначений дифференциальные уравнения системы примут вид



В состав полученного выражения входит уравнение установившегося режима -первый и третий член в левой части и первый член в правой части. Установившееся движение нам задано и не представляет предмета исследования. Вычтем из полученного уравнения уравнение установившегося движения и получим уравнение в отклонениях, поведение которых нас и интересует. В дальнейшем, в целях сокращения записей, знак будем опускать. Получим
(2.2.2)
Полученное дифференциальное уравнение является линейным уравнением и определяет линейную модель системы. Отметим, что использовать линейную модель для исследования системы можно только при малых отклонениях переменных и поэтому часто говорят, что результаты исследований, полученных при использовании линейной модели справедливы только в малом.
Уравнение в отклонениях (2.2.2) описывает возмущенное движение системы, являющееся результатом действия каких-либо возмущений, приводящих к появлению отклонений от установившегося режима. Уравнение установившегося режима описывает невозмущенное движение.
Сложность решения дифференциальных уравнений высокого порядка без применения вычислительной техники и невозможность на основании численных решений создать общие методы анализа и синтеза систем привели к широкому использованию методов, связанных с применением математического аппарата преобразований Лапласа и Фурье. Эти методы и составили сущность так называемой классической теории автоматического управления.
Необходимо отметить, что существуют нелинейные функции, которые невозможно линеаризовать по методу малого отклонения и, в этих случаях, используют специальные методы, разработанные для исследования нелинейных систем.
Рассмотрим случай, когда все переменные состояния могут быть измерены, а результаты этих действий могут быть использованы для управления системой. Однако такой случай не всегда технически реализуем. Поэтому для систем автоматического управления вводится понятие управляемости.
Рассмотрим линейную систему с постоянными коэффициентами:
|
|
где
![]() –
матрицы с постоянными коэффициентами.
–
матрицы с постоянными коэффициентами.
При этом управление полагается скалярным, т.е. управление объектом осуществляется по одной координате.
Заданы
начальная и конечная точка
![]() ,
и
,
и
![]() .
Задача состоит в том, чтобы перевести
систему из заданного начального
положения в некоторую точку, совпадающую
с началом координат. При этом никаких
ограничений на величину управляющего
воздействия и время регулирования не
накладывается. Если такая задача
решается при любых начальных и конечных
условиях, то такая система является
управляемой.
.
Задача состоит в том, чтобы перевести
систему из заданного начального
положения в некоторую точку, совпадающую
с началом координат. При этом никаких
ограничений на величину управляющего
воздействия и время регулирования не
накладывается. Если такая задача
решается при любых начальных и конечных
условиях, то такая система является
управляемой.
Система называется управляемой, если существует такое управление, которое из любого начального состояния в любое конечное положение. При каких условиях система является управляемой? Попытаемся выяснить причины неуправляемости. Это удобно сделать с помощью геометрического представления движения системы. Как отмечалось выше решение линейного однородного уравнения имеет вид:
Если
какой-нибудь из коэффициентов
![]() ,
а остальные отличны от нуля, то движение
происходит в инвариантном подпространстве
матрицы
,
а остальные отличны от нуля, то движение
происходит в инвариантном подпространстве
матрицы
![]() .
С геометрической точки зрения все
траектории лежат в плоскости S, т.е.
вектор
.
С геометрической точки зрения все
траектории лежат в плоскости S, т.е.
вектор
![]() также
направлен вдоль этой плоскости.
Предположим, что вектор
также
направлен вдоль этой плоскости.
Предположим, что вектор
![]() тоже
лежит в плоскости
тоже
лежит в плоскости
![]() .
Очевидно, что добавка к вектору
.
Очевидно, что добавка к вектору
![]() величины
величины
![]() оставляет
вектор
в
той же плоскости, хотя и деформирует
траекторию движения вектора состояния.
Следовательно, если начальная точка
лежит в плоскости
,
а конечная — нет, то попасть в точку с
заданными координатами нельзя, так как
не существует управления, которое
переводит состояние системы с заданными
параметрами из начальной точки в
конечную. Такая система неуправляема
по определению.
оставляет
вектор
в
той же плоскости, хотя и деформирует
траекторию движения вектора состояния.
Следовательно, если начальная точка
лежит в плоскости
,
а конечная — нет, то попасть в точку с
заданными координатами нельзя, так как
не существует управления, которое
переводит состояние системы с заданными
параметрами из начальной точки в
конечную. Такая система неуправляема
по определению.
Условия управляемости в терминах исходной системы получены Калманом и имеют вид:
Для управляемости системы (2.2.3) необходимо и достаточно, чтобы выполнялось условие вида
|
(2.2.4) |
Это условие выполняется, если матрица U вида
![]()
имеет ранг, равный N.
Рангом матрицы называется наибольший порядок ее определителя, отличный от нуля.
Рассмотрим
поведение системы в пространстве
состояний собственных векторов
![]() матрицы
А (для простоты будем полагать, что
собственные значения матрицы А —
действительные и различные). Как мы
убедимся в дальнейшем, в этом пространстве
условия управляемости становятся
практически очевидными. Введем неособое
преобразование вида
матрицы
А (для простоты будем полагать, что
собственные значения матрицы А —
действительные и различные). Как мы
убедимся в дальнейшем, в этом пространстве
условия управляемости становятся
практически очевидными. Введем неособое
преобразование вида
|
(2.2.5) |
где
![]() .
.
Выше
отмечалось, что
![]() и
и
![]() существует.
Поэтому вектора X и Y связаны однозначной
зависимостью. Следовательно, задачи
об управляемости в пространствах этих
переменных эквивалентны.
существует.
Поэтому вектора X и Y связаны однозначной
зависимостью. Следовательно, задачи
об управляемости в пространствах этих
переменных эквивалентны.
В
пространстве новых переменных
![]() поведение
САУ описывается уравнением
поведение
САУ описывается уравнением
|
(2.2.6) |
Рассмотрим
произведение
![]()
![]() .
.
так
как
![]() ,
то
,
то
![]() ,
,
где
Следовательно, уравнение (2.2.6) приводится к виду
![]() .
.
или
|
(2.2.7) |
![]() —
вектор
столбец с компонентами
—
вектор
столбец с компонентами
![]() .
.
Так как матрица Р диагональная, то
![]() ,
где
,
где
![]() .
.
и
если хотя бы одно
![]() ,
то координата
,
то координата
![]() —
неуправляема. Поэтому можно предположить,
что, если все
—
неуправляема. Поэтому можно предположить,
что, если все
![]() ,
то система управляема.
,
то система управляема.
Рассмотрим
n-мерное пространство состояния Х, в
котором каждому состоянию системы
соответствует некоторое положение
изображающей точки, определяемое
значениями фазовых координат
![]() .
.
Пусть
в пространстве состояния заданы два
множества
![]() и
и
![]() .
Рассматриваемая система будет
управляемой,
если
существует такое управление
.
Рассматриваемая система будет
управляемой,
если
существует такое управление
![]() ,
определенное на конечном интервале
времени
,
определенное на конечном интервале
времени
![]() ,
которое переводит изображающую точку
в пространстве Х из подобласти
,
которое переводит изображающую точку
в пространстве Х из подобласти
![]() в
подобласть
в
подобласть
![]() .
.
Можно сузить определение управляемости и понимать под ней возможность перевода изображающей точки из любой области пространства состояний Х в начало координат. Система будет управляемой, если каждое состояние управляемо в этом смысле.
От
пространства состояний Х перейдем к
другому пространству
![]() посредством
неособого преобразования
посредством
неособого преобразования
![]() ,
причем
,
причем
![]() ,
где
,
где
![]() —
матрица коэффициентов
—
матрица коэффициентов
![]() .
.
Тогда вместо уравнения вида
|
(2.2.8) |
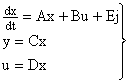 ,
,где j — матрица возмущающих и задающих воздействий,
u — матрица-столбец управляющий величин,
y — матрица-столбец регулируемых величин,
x- матрица-столбец фазовых координат,
будем иметь
|
(2.2.9) |
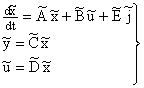 .
.Здесь использованы преобразованные матрицы коэффициентов:
![]() ,
,
![]() ,
,
![]() ,
,
![]() и
и
![]() .
.
Введение
новых фазовых координат посредством
неособого преобразования
приводит
к эквивалентным системам различной
структуры. При некотором преобразовании
может оказаться, что часть управляющих
величин не входит в некоторые
дифференциальные уравнения (2.2.9) или
часть фазовых координат не участвует
в формирование вектора выходного
сигнала
![]() .
В первом случае система не будет
полностью управляемой, а во втором —
полностью наблюдаемой.
.
В первом случае система не будет
полностью управляемой, а во втором —
полностью наблюдаемой.
В случае не полностью управляемой системы ее исходное уравнение могут быть представлены в виде
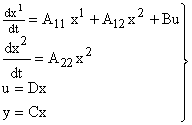
Это
иллюстрирует рисунок. 2.2.1. Набор фазовых
координат
![]() соответствует
управляемой части фазовых координат,
а набор
соответствует
управляемой части фазовых координат,
а набор
![]() —
неуправляемой части.
—
неуправляемой части.
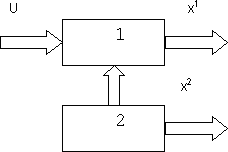
Рисунок. 2.2.1. Пример не полностью управляемой системы
Калманом
был доказан критерий управляемости,
который гласит, что размерность
![]() управляющей
части системы, то есть порядок первой
группы уравнений (2.2.9) совпадает с рангом
матрицы
управляющей
части системы, то есть порядок первой
группы уравнений (2.2.9) совпадает с рангом
матрицы
![]() ,
,
где k — размерность управляющего вектора.
При
![]() система
полностью управляема, при
система
полностью управляема, при
![]() —
система не полностью управляема, при
—
система не полностью управляема, при
![]() —
система полностью не управляема.
—
система полностью не управляема.
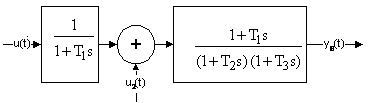
Рисунок. 2.2.2. Структура исходной системы.
На
рисунке. 2.2.2 представлен простейший
пример. Если рассматривать выходную
величину
![]() при
нулевых начальных условиях, то можно
записать
при
нулевых начальных условиях, то можно
записать
![]() ,
,
где
![]() определяются
начальными условиям до приложения
входного сигнала
определяются
начальными условиям до приложения
входного сигнала
![]() ,
а
,
а
![]() —
вынужденная составляющая. Система
устойчива при
—
вынужденная составляющая. Система
устойчива при
![]() .
.
Если начальные условия до приложения управляющего сигнала были нулевыми, то поведение системы может быть рассчитано по передаточной функции
![]()
В этом случае переходный процесс в системе определяется как
![]()
Как
следует из последнего выражения, во
втором случае система описывается
дифференциальным уравнением не третьего,
а второго порядка. Система будет
устойчивой
даже при
![]() .
.
Рассмотренная
система будет не полностью управляемой.
В ней оказывается
![]() ,
а
,
а
![]() .
.
При
введении второй составляющей управления
![]() система
оказывается полностью управляемой, и
ей будет соответствовать матрица-строка
передаточный функций по управлению
система
оказывается полностью управляемой, и
ей будет соответствовать матрица-строка
передаточный функций по управлению
 .
.
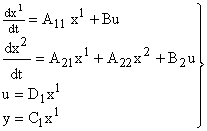
В случае не полностью наблюдаемой системы ее уравнения могут быть представлены в виде
 .
.
Эти
уравнения отличаются от (2.2.9) тем, что
фазовые координаты группы
не
входят ни в выражения для
![]() и
и
![]() ,
ни в первое уравнение, куда входят
фазовые координаты группы
.
Группа фазовых координат
относится
к ненаблюдаемым.
,
ни в первое уравнение, куда входят
фазовые координаты группы
.
Группа фазовых координат
относится
к ненаблюдаемым.
Калманом показано, что порядок первой группы уравнений совпадает с рангом матрицы V вида
![]() .
.
При система полностью наблюдаема, при — система не полностью наблюдаема, при — система полностью ненаблюдаемая.
На рисунке. 2.2.3 изображен простейший пример. Для него легко показать, что в формировании выхода участвуют только две фазовые координаты из трех.

Рисунок. 2.2.3. Пример не полностью наблюдаемой системы
В общем случае система может содержать четыре группы фазовых координат:
управляемую, но ненаблюдаемую часть ,
управляемую и наблюдаемую часть ,
неуправляемую
и ненаблюдаемую часть
![]() ,
,
неуправляемую
но наблюдаемую част
![]() .
.
Исходные уравнения системы (2.2.9) можно для самого общего случая записать следующим образом:
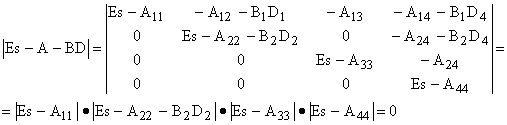
Левая часть характеристического уравнения
![]() ,
,
где Е — единичная матрица размера , системы в этом случае содержит четыре сомножителя:
Управляемость и наблюдаемость системы в изложенном смысле не всегда совпадает с практическими представлениями. Даже если какая-либо фазовая координата и может быть вычислена по доступным для измерения выходным величинам обработка измеренных величин может быть, во-первых, сложной и, во-вторых, она может быть затруднена наличием помех. Поэтому практически наблюдаемыми координатами обычно считаются те из них, которые могут быть измерены датчиками различных типов.
В статическом режиме работы все составляющие вектора состояния САУ не зависят от момента времени их рассмотрения и остаются постоянными, соответствующими условию равновесия системы. Это состояние в зависимости от структуры и параметров САУ может быть устойчивым или неустойчивым. Если после изменения вектора внешних воздействий система приходит в состояние, при котором все составляющие вектора ее состояния становятся постоянными, то есть система возвращается в положение равновесия, то это состояние равновесия является устойчивым. В случае, когда после изменение входного сигнала или возмущения, система не стремится в первоначальное состояние, а вектор выходных сигналов изменяется независимо от внешнего воздействия, то такое состояние является неустойчивым. В этом случае система автоматического управления является неустойчивой. Графическая интерпретация таких режимов работы САУ представлена на рисунке. 2.2.4.
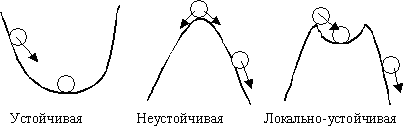
Рисунок. 2.2.4. Графическая интерпретация устойчивости.
Под устойчивостью понимается свойство САУ возвращаться в исходное состояние после вывода ее из этого состояния и прекращения влияния задающего или возмущающего воздействия.
Только устойчивая система автоматического управления может выполнять возложенные на нее функции. Поэтому одной из основных задач САУ является обеспечение ее устойчивости.
Основы теории устойчивости САУ были заложены А.М. Ляпуновым в его работе "Общая задача устойчивости движений", опубликованной в 1882 г.
Если САУ представляется системой линейных дифференциальных уравнений, то ее устойчивость не зависит от величины и точки приложения внешних возмущений.
Для определения устойчивости необходимо составить характеристическое уравнение D(p) и найти его корни. Составить его можно, воспользовавшись передаточной функцией САУ.
Для устойчивости линейной стационарной системы автоматического управления необходимо и достаточно, чтобы вещественные части всех корней характеристического уравнения системы были отрицательными. Если, корни расположить на комплексной плоскости (рисунок.5), то геометрическая интерпретация необходимых и достаточных условий устойчивости будет следующей: система устойчива, когда все корни характеристического уравнения располагаются в левой полуплоскости комплексной плоскости корней.
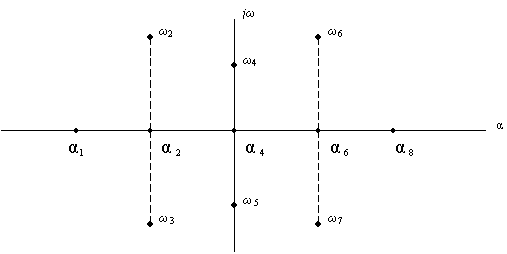
Рисунок. 2.2.5. Комплексная плоскость корней
Если хотя бы один корень находится в правой полуплоскости, то система неустойчива. Если корни располагаются на мнимой оси, то система находится на границе устойчивости и переходной процесс будет иметь постоянную амплитуду.
Общий вид характеристического уравнения
D(p) = C0 + C1(p) + … + CnPn,
где C0, C1 … Cn – коэффициенты, Pi – корни характеристического уравнения.
Например: Pi = a i, Pk = a k + jw k, Pk+1 = a k - jw k.
Полином D(p) является знаменателем передаточной функции.
Непосредственное нахождение корней характеристического уравнения доступно лишь для уравнений первого и второго порядка. При n > 2 решение или громоздко, или вообще в аналитической форме невозможно. В связи с этим возникает задача суждения об устойчивости косвенными методами, позволяющими оценить расположение корней характеристического уравнения на комплексной плоскости без непосредственного их определения. Решают ее с помощью определенных правил, называемых критериями устойчивости.