

3.2 Частотные характеристики, логарифимические частотные характеристики. Связь с передаточной функцией. Свойства и расчет частотных характеристик по передаточной функции
Определяют поведение объекта в частотной области при подаче на его вход гармонического сигнала:

где
 -
круговая частота сигнала, f
-
частота, T
-
период повторения сигнала,
хmax
–амплитуда сигнала.
-
круговая частота сигнала, f
-
частота, T
-
период повторения сигнала,
хmax
–амплитуда сигнала.
На выходе линейного объекта также возникают гармонические колебания той же частоты, но с другой амплитудой и фазой (рис. 3.2.1):

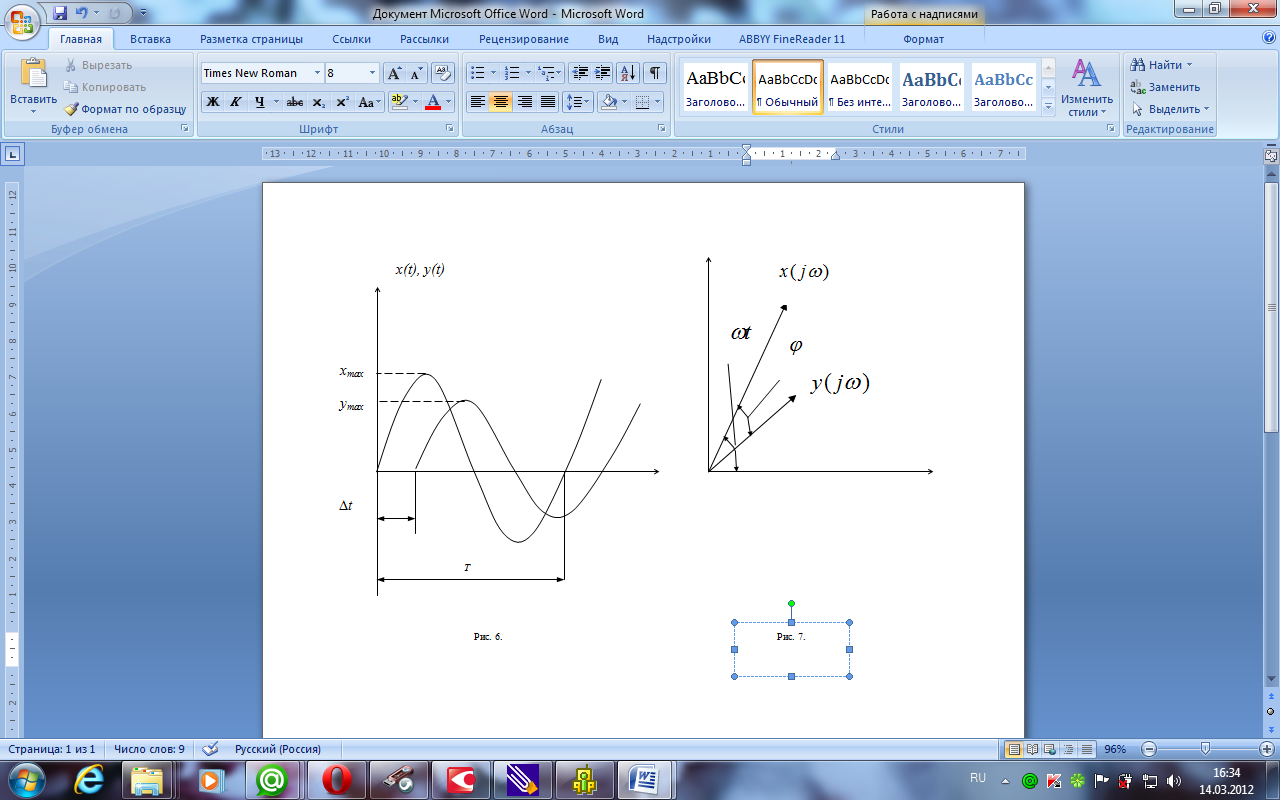
Рисунок 3.2.1-Сигнал на входе и выходе объекта
Значения
ymax
и
 зависят от частоты входного сигнала.
Поскольку нас интересует изменение
сразу двух величин – амплитуды и фазы,
частотные характеристики удобно
рассматривать в комплексной плоскости.
Гармонический входной сигнал изображается
на комплексной плоскости вектором
зависят от частоты входного сигнала.
Поскольку нас интересует изменение
сразу двух величин – амплитуды и фазы,
частотные характеристики удобно
рассматривать в комплексной плоскости.
Гармонический входной сигнал изображается
на комплексной плоскости вектором
 ,
длина (модуль) которого равен амплитуде
хmax,
а угол наклона (аргумент) равен фазе
колебаний
,
длина (модуль) которого равен амплитуде
хmax,
а угол наклона (аргумент) равен фазе
колебаний
 (рис.
3.2.2):
(рис.
3.2.2):

(Символ
 в данном случае означает «изображается»).
в данном случае означает «изображается»).
Рисунок 3.2.2-Изображение гармонического входного сигнала
Аналогично
выходной сигнал объекта y(t)
изображается в комплексной плоскости
вектором
 :
:

Изображения и называются изображениями по Фурье (спектрами Фурье) гармонических сигналов x(t) и y(t).
Отношение
изображений Фурье выходного гармонического
сигнала к входному называется частотной
передаточной функцией (ЧПФ) или
комплексной частотной характеристикой
 :
:

Модуль
частотной передаточной функции
 на частоте
на частоте
 определяет коэффициент передачи объекта
на данной частоте,
определяет коэффициент передачи объекта
на данной частоте,
 -
сдвиг по фазе между выходным и входным
сигналами на частоте
.
-
сдвиг по фазе между выходным и входным
сигналами на частоте
.
Передаточная
функция есть функция комплексной
переменной
 .
Частотная передаточная функция есть
функция мнимой переменной
.
Частотная передаточная функция есть
функция мнимой переменной
 .
Следовательно, частотная передаточная
функция есть частный случай передаточной
функции, когда переменная s
принимает чисто мнимое значение
.
Поэтому формально выражение для
частотной передаточной можно найти,
заменяя в передаточной функции
.
Следовательно, частотная передаточная
функция есть частный случай передаточной
функции, когда переменная s
принимает чисто мнимое значение
.
Поэтому формально выражение для
частотной передаточной можно найти,
заменяя в передаточной функции
 переменную
s
на
,
т.е. полагая
переменную
s
на
,
т.е. полагая
 :
:
В чём же разница между передаточной функцией и частотной передаточной функцией?
Передаточная функция отражает поведение объекта регулирования или любого динамического звена в динамике при произвольной форме входного воздействия. Частотная передаточная функция отражает поведение объекта (звена) лишь в установившемся режиме гармонических колебаний. Таким образом, частотная передаточная функция есть частный случай передаточной функции (так же, как мнимая переменная есть частный случай комплексной переменной s).
Частотную передаточную функцию записывают в алгебраической форме (декартовых координатах):


либо в показательной форме (полярных координатах):


Годограф вектора (график, описываемый концом вектора при изменении частоты от о до ) называется амплитудно-фазовой характеристикой (АФХ). АФХ показывает, как изменяются отношения амплитуд и сдвиг по фазе между выходным и входным сигналами при изменении частоты входного сигнала (рис. 3.2.3).
Зависимости отношения амплитуд выходного и входного сигналов и сдвига по фазе между выходным и входным сигналами от частоты называются амплитудно-частотной (АЧХ) и фазо-частотной (ФЧХ) характеристиками соответственно. АФХ содержит такую же информацию об объекте (звене), как АЧХ и ФЧХ вместе взятые.
Методика определения частотных характеристик системы следующая.
1).В передаточной функции системы делают замену s=j и полученную АФЧХ представляют в виде суммы вещественной и мнимой частей.

Функцию U() называют вещественной частотной характеристикой, а функцию V()- мнимой частотной характеристикой.
2). Определяют АЧХ и ФЧХ.
 (3.2.1)
(3.2.1)
 (3.2.2)
(3.2.2)
Пример Определить частотные характеристики для звена с передаточной функцией

Делаем замену s=j.


Отсюда

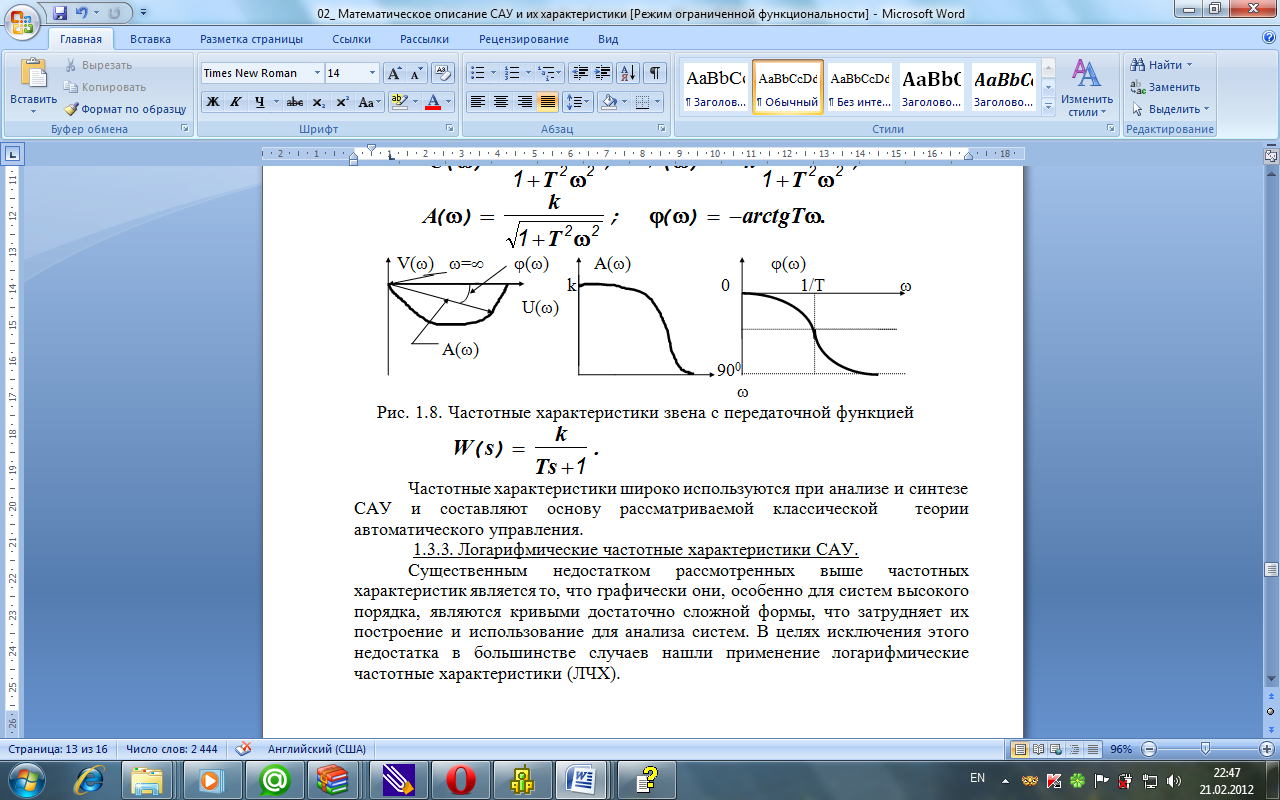
Рис. 3.2.3. Частотные характеристики звена с передаточной функцией

Частотные характеристики широко используются при анализе и синтезе САУ и составляют основу рассматриваемой классической теории автоматического управления.
Логарифмические частотные характеристики САУ.
Существенным недостатком рассмотренных выше частотных характеристик является то, что графически они, особенно для систем высокого порядка, являются кривыми достаточно сложной формы, что затрудняет их построение и использование для анализа систем. В целях исключения этого недостатка в большинстве случаев нашли применение логарифмические частотные характеристики (ЛЧХ).
Логарифмической амплитудной частотной характеристикой (ЛАХ) называется кривая, соответствующая выражению
 (3.2.3)
(3.2.3)
и построенная в логарифмическом масштабе частот.
Логарифмической фазовой частотной характеристикой (ЛФХ) называется фазовая частотная характеристика (), построенная в логарифмическом масштабе частот.
Величина L() измеряется в децибелах, а ()- в градусах или радианах. Единицами измерения логарифмической оси частот являются октавы и декады.
Октавой называется интервал частот, соответствующий изменению частоты в два раза и равный lg2=0.3010. Декадой называется интервал частот, соответствующий изменению частоты в десять раз и равный lg10=1. Легко подсчитать, что одна декада содержит 3.32 октавы. Точка, соответствующая значению частоты, равному нулю, лежит слева в бесконечности, т.к. lg0=-. Поэтому ось ординат проводится через любую точку оси частот так, чтобы справа располагалась та часть ЛЧХ, которую нужно исследовать.
Можно рекомендовать следующую методику построения логарифмической сетки координат. Вначале ось частот разбивается на декады и октавы, причем каждая декада разбивается на октавы отдельно. Для удобства инженерной практики под точками этой оси пишут не значения логарифмов частот, а сами частоты.
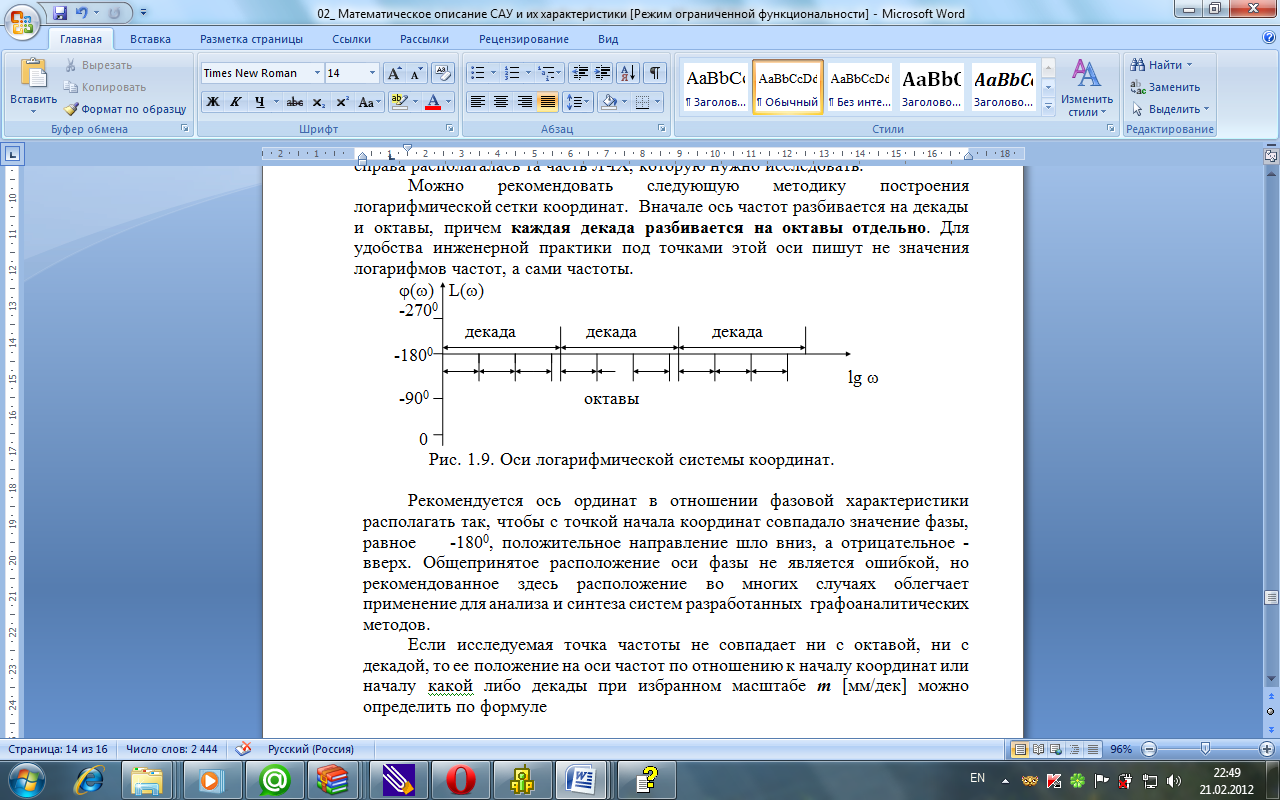
Рис. 3.2.4. Оси логарифмической системы координат.
Рекомендуется ось ординат в отношении фазовой характеристики располагать так, чтобы с точкой начала координат совпадало значение фазы, равное -1800, положительное направление шло вниз, а отрицательное - вверх. Общепринятое расположение оси фазы не является ошибкой, но рекомендованное здесь расположение во многих случаях облегчает применение для анализа и синтеза систем разработанных графоаналитических методов.
Если исследуемая точка частоты не совпадает ни с октавой, ни с декадой, то ее положение на оси частот по отношению к началу координат или началу какой либо декады при избранном масштабе m [мм/дек] можно определить по формуле
 (3.2.4)
(3.2.4)
Здесь 0-частота, соответствующая началу координат или началу декады.
Обратная задача, т.е. определение значения частоты по положению соответствующей ей точки на оси частот, решается использованием формулы
 (3.2.5)
(3.2.5)
При построениях ЛЧХ вручную удобным является масштаб равный
m=50 мм/дек.
Во многих случаях передаточную функцию системы можно представить в виде произведения передаточных функций элементарных звеньев
Тогда

В соответствии с правилами о логарифме произведения и произведении показательных функций получим
 (3.2.6)
(3.2.6)
 (3.2.7)
(3.2.7)
Таким образом, логарифмические характеристики сложной системы могут быть получены суммированием ЛЧХ составляющих ее простых звеньев.
Пример. Определить ЛЧХ для САУ с передаточной функцией
Используя результаты предыдущего примера, получим

При
 величина
величина
 и
и
 Это уравнение прямой, параллельной оси
частот.
Это уравнение прямой, параллельной оси
частот.
При
 величина
величина
 и
и

Это уравнение прямой имеющей наклон к оси частот, равный -20 дБ/дек и сопрягающейся с предыдущей прямой в точке 0=1/T.
Таким образом, ЛАХ данной системы может приближенно построена в виде двух сопрягающихся отрезков прямых. Такая ЛАХ называется асимптотической. Возможность замены кривых асимптотическими ЛАХ является важным достоинством ЛЧХ. Ошибка при такой замене для большинства простых систем не велика и для рассматриваемой системы ее максимальное значение в точке =0 не превышает 3 дБ.
Фазовая характеристика исследуемой системы определена выше.
Частота 0=1/T называется частотой сопряжения. Частота с, при которой ЛАХ пересекает ось частот, что соответствует значению А()=1, называется частотой среза системы.
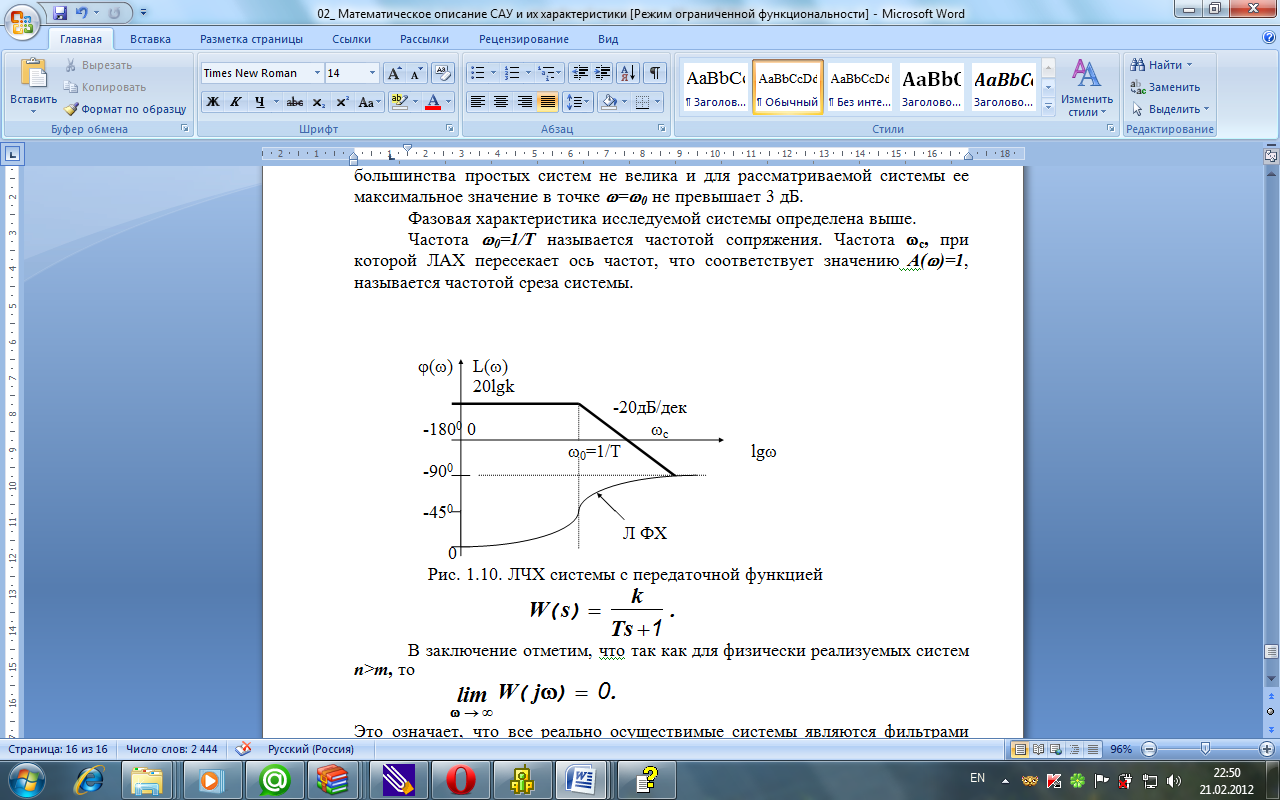
Рис. 3.2.5. ЛЧХ системы с передаточной функцией
В заключение отметим, что так как для физически реализуемых систем n>m, то

Это означает, что все реально осуществимые системы являются фильтрами нижних частот.
3.3 СОЕДИНЕНИЯ ОДНОНАПРАВЛЕННЫХ ЗВЕНЬЕВ И ИХ ХАРАКТЕРИСТИКИ. ЭКВИВАЛЕНТНЫЕ ПРЕОБРАЗОВАНИЯ. ПРЕДСТАВЛЕНИЕ АСР В ВИДЕ СИГНАЛЬНОГО ГРАФА. ФОРМУЛА МЕЙСОНА
Соединения однонаправленных звеньев и их характеристики
В САУ встречаются три вида соединений звеньев: последовательное, параллельное и соединение звеньев по схеме с обратной связью.
В системе, состоящей из n последовательно соединенных звеньев (рисунок. 2.28) выходной сигнал предыдущего звена равен входному сигналу последующего.
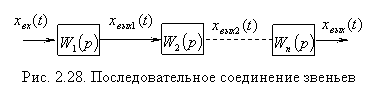
Рисунок 3.3.1 – Последовательное соединение звеньев
Изображения по Лапласу выходных сигналов этих звеньев равны:
xвых1(p) = W1(p)xвх(p); xвых2(p) = W2(p) xвых1(p); … xвых(p) = Wn(p)xвых(n)(p).
Откуда
xвых![]() xвх(p).
xвх(p).
Следовательно, передаточная функция системы примет вид:
![]() .
(3.3.1)
.
(3.3.1)
Таким образом, передаточная функция последовательно соединенных звеньев равна произведению передаточных функций этих звеньев.
Частотные характеристики последовательно соединенных звеньев:
![]()
где
A(ω)
= A1(ω)A2(ω)…An(ω);
![]() .
.
Логарифмическая амплитудно-частотная характеристика звеньев, соединенных последовательно:
![]()
![]() .
(3.3.2)
.
(3.3.2)
Следовательно, логарифмические амплитудно- и фазо-частотная характеристики системы, состоящей из последовательно соединенных звеньев, равны сумме ЛАХ и ФЧХ отдельных звеньев. Это существенно упрощает построение логарифмических частотных характеристик, по сравнению с обычными характеристиками.
Передаточная функция минимально-фазовой системы в общем случае может быть записана в виде:
 .
(3.3.3)
.
(3.3.3)
В
выражении (3.3.3) сомножители в числителе
![]() определяют
нули передаточной функции, а именно:
определяют
нули передаточной функции, а именно:
сомножитель
![]() соответствует
нулевому нолю
кратности
соответствует
нулевому нолю
кратности
![]() ,
,
сомножитель
![]() –
действительному нолю
–
действительному нолю
![]() кратности
l,
кратности
l,
сомножитель
![]() –
паре комплексно-сопряженных нолей
кратности
–
паре комплексно-сопряженных нолей
кратности
![]() .
.
Аналогичные сомножители в знаменателе выражения (3.3.3) определяют полюса передаточной функции, а именно:
сомножитель
![]() соответствует
нулевому полюсу кратности
соответствует
нулевому полюсу кратности
![]() ,
,
сомножитель
![]() –
действительному полюсу
–
действительному полюсу
![]() кратности
кратности![]() ,
,
сомножитель
![]() –
паре комплексно-сопряженных полюсов
кратности
–
паре комплексно-сопряженных полюсов
кратности
![]() .
.
Очевидно, что в зависимости от соотношения s и передаточная функция (3.3.3) может иметь только один тип особенностей: либо нулевые ноли, либо нулевые полюса. Кроме того, предполагается, что в (3.3.3) для коэффициентов демпфирования выполняются неравенства: 0 < ζ < 1.
Формально
передаточная функция (3.3.3) представляет
собой произведение нескольких
сомножителей, что соответствует
последовательному соединению звеньев,
и для вычисления
![]() можно
воспользоваться выражением (3.3.2). При
этом построение ЛАХ системы
осуществляется без предварительного
построения ЛАХ отдельных звеньев по
следующим правилам.
можно
воспользоваться выражением (3.3.2). При
этом построение ЛАХ системы
осуществляется без предварительного
построения ЛАХ отдельных звеньев по
следующим правилам.
На
оси частот в порядке возрастания
указываются все частоты сопряжения
![]() ЛАХ,
определяемые соответствующими
постоянными времени:
=
1/
ЛАХ,
определяемые соответствующими
постоянными времени:
=
1/![]() .
.
Построение
ЛАХ начинается на частотах, меньших
самой малой частоты сопряжения
![]() .
.
Если
при этом в выражении (3.3.3) выполняется
равенство s
=
=
0 (система не имеет нулевых полюсов и
нолей), то первая низкочастотная
асимптота ЛАХ проводится параллельно
оси частот на уровне 20 lgk
до частоты
![]()
Если
в выражении (3.3.3) s
![]() ,
а
=
0, то уравнение низкочастотной асимптоты:
,
а
=
0, то уравнение низкочастотной асимптоты:
![]() ,
(3.3.4)
,
(3.3.4)
т.е.
ЛАХ до наименьшей частоты сопряжения
![]() проводится
с наклоном (+20∙s)
дБ/дек.
проводится
с наклоном (+20∙s)
дБ/дек.
Если
в выражении (3.3.3) s
=![]() ,
а
,
а
![]() ,
то уравнение низкочастотной асимптоты:
,
то уравнение низкочастотной асимптоты:
![]() ,
(3.3.5)
,
(3.3.5)
и наклон ЛАХ до наименьшей частоты сопряжения равен -20∙ дБ/дек.
Для
построения низкочастотной асимптоты
ЛАХ необходимо для произвольной частоты
![]() меньшей
или равной
по
выражениям (3.3.4) или (3.3.5) рассчитать
величину
меньшей
или равной
по
выражениям (3.3.4) или (3.3.5) рассчитать
величину
![]() и
через точку с координатами (
;
)
провести ЛАХ с необходимым наклоном.
и
через точку с координатами (
;
)
провести ЛАХ с необходимым наклоном.
На
частоте
производится
излом ЛАХ с изменением ее наклона,
величина которого определяется видом
сомножителя в выражении, которому
соответствует сопрягающая частота
.
Наклон ЛАХ на частоте
изменяется
по отношению к предыдущему наклону на
+20∙l,
если
соответствует
постоянной времени T
из сомножителя вида
![]() в
числителе передаточной функции.
в
числителе передаточной функции.
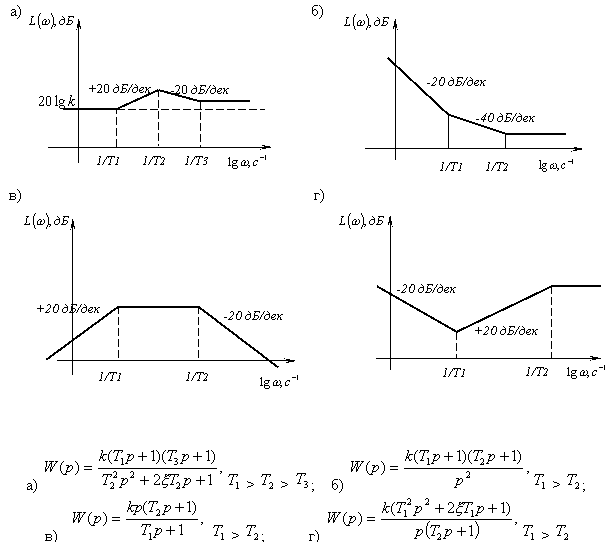
Рисунок 3.3.2 – Логарифмическая амплитудно – частотная характеристика системы с передаточной функцией.
Если сомножитель вида , соответствующий присутствует в знаменателе (3.3.3), то изменение наклона составляет -20∙ .
В
случае, когда
соответствует
постоянной времени T
из
сомножителя вида
![]() ,
происходит изменение предыдущего
наклона на +40∙h,
если указанный сомножитель присутствует
в числителе
,
и на -40∙
,
если он присутствует в знаменателе.
,
происходит изменение предыдущего
наклона на +40∙h,
если указанный сомножитель присутствует
в числителе
,
и на -40∙
,
если он присутствует в знаменателе.
Таким же образом характеристика продолжается в сторону увеличения частоты, претерпевая соответствующие изломы на каждой сопрягающей частоте . При необходимости вид построенной ЛАХ уточняется путем введения поправок для колебательных звеньев.
Примеры построения ЛАХ по различным передаточным функциям приведены на рис. 3.3.2.
В системе, состоящей из n параллельно соединенных звеньев (рис. 3.3.4), на вход каждому из звеньев подается один и тот же сигнал xвх(p), а их выходные сигналы суммируются:
![]() .
.
Так как
![]() ;
;
![]() ;
;
……………………………
![]() ,
,
то
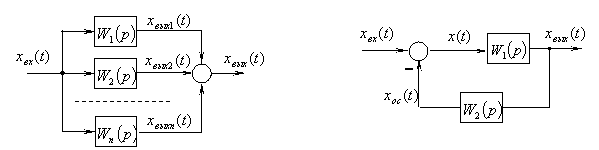
Рисунок 3.3.3 – Параллельное Рисунок 3.3.4 – Соединение звеньев соединение звеньев. по схеме с обратной связью.
|
|
|
|
xвых(p)
= xвых1(p)
+xвых2(p)+…+xвых(n)(p)
=
![]()
![]()
![]() .
.
Таким образом, передаточная функция параллельно соединенных звеньев равна сумме передаточных функций отдельных звеньев:
W(p)
=![]()
![]()
![]() .
(3.3.6)
.
(3.3.6)
Очевидно, что в случае, когда выходной сигнал какого-либо из параллельно соединенных звеньев поступает в сумматор со знаком «минус», передаточная функция этого звена входит также со знаком «минус».
Рассмотрим структуру системы с обратной связью (рис. 3.3.4). На вход звена, охваченного обратной связью, подается сигнал рассогласования, равный:
![]() .
.
Поскольку
![]() ,
то
,
то
![]()
Изображение выходного сигнала:
xвых(р)=
![]()
![]()
![]()
откуда
![]() .
.
Следовательно, передаточная функция замкнутой системы (в замкнутом состоянии) описывается следующим выражением:
Ф(p)
=
![]() .
(3.3.7)
.
(3.3.7)
Передаточная функция (2.63) найдена для случая отрицательной обратной связи. Если обратная связь положительная, то
Ф(p)
=
![]() .
(3.3.8)
.
(3.3.8)
При анализе и синтезе CАУ, наряду с передаточной функцией (3.3.7) – (3.3.8), используются передаточная функция системы разомкнутой системы и передаточная функция по ошибке.
Передаточная функция разомкнутой системы (замкнутой системы в разомкнутом состоянии):
W(p)
= ![]() .
(3.3.9)
.
(3.3.9)
Передаточная функция по ошибке:
Фx(p)
=
![]()
![]()
![]() .
(3.3.10)
.
(3.3.10)