

Методы построения фазовых портретов
Для построения фазовых портретов нелинейных систем используется ряд методов. Наибольшее распространение получили нижеследующие методы.
Интегрирование уравнений фазовых траекторий
В линейных системах интегрирование дифференциального уравнения фазовых траекторий (10.2.3) не представляет трудностей. Для нелинейных систем эта задача существенно усложняется. Аналитическое решение в большинстве случаев получить не удается, поэтому для построения фазовых портретов нелинейных систем применяют численное интегрирование уравнения (10.2.3). В ряде случаев предварительно проводят качественное исследование изучаемой системы. Благодаря использованию методов качественной теории дифференциальных уравнений определяют структуру фазовых портретов - число и тип возможных в данной системе состояний равновесия, количество предельных циклов и их взаиморасположение, наличие сепаратрис. Все это позволяет определить совокупность возможных в исследуемой системе режимов работы, и численное интегрирование уравнения фазовых траекторий выполнить для целого ряда начальных условий, которые являются наиболее важными с точки зрения выделения областей фазового портрета.
Метод изоклин
Метод изоклин имеет невысокую точность и используется для качественной оценки хода фазовых траекторий.
′
Изоклиной называется кривая, представляющая геометрическое место точек, в которых касательные ко всем интегральным кривым наклонены под одним и тем же углом к оси абсцисс. Методика построения фазового портрета методом изоклин складывается из следующих этапов:
1 Построение изоклин;
2 Нанесение направления касательных к фазовым траекториям;
3 Определение характера искомого фазового портрета.
П ри
использовании метода изоклин считается
известным система дифференциальных
уравнений (10.2.2), описывающая исследуемую
систему, для которой предстоит построить
фазовый портрет. Следовательно,
известно уравнение фазовых траекторий
(10.2.3)
ри
использовании метода изоклин считается
известным система дифференциальных
уравнений (10.2.2), описывающая исследуемую
систему, для которой предстоит построить
фазовый портрет. Следовательно,
известно уравнение фазовых траекторий
(10.2.3)
Д ля
получения изоклин необходимо положить
ля
получения изоклин необходимо положить
т.е.
(10.2.4)
З адавая
различные значения константы -(C)
в
(10.2.4), на фазовой плоскости строится
семейство изоклин,
на которых под углом γ=arctgC
к оси абсцисс наносятся стрелки и по
ним определяется характер фазового
портрета системы. Допустим, что поле
изоклин имеет вид, представленный на
рис.
10.2.8. Начальное положение изображающей
точки выбирается произвольно на изоклине
C1
=0.
Из этой точки M0
проводится два отрезка: один под углом
γ1=arctgC1
,
а другой под углом γ2=arctgC2
до пересечения
их с соседней изоклиной C2.
адавая
различные значения константы -(C)
в
(10.2.4), на фазовой плоскости строится
семейство изоклин,
на которых под углом γ=arctgC
к оси абсцисс наносятся стрелки и по
ним определяется характер фазового
портрета системы. Допустим, что поле
изоклин имеет вид, представленный на
рис.
10.2.8. Начальное положение изображающей
точки выбирается произвольно на изоклине
C1
=0.
Из этой точки M0
проводится два отрезка: один под углом
γ1=arctgC1
,
а другой под углом γ2=arctgC2
до пересечения
их с соседней изоклиной C2.
Точки пересечения отрезков с изоклиной обозначаются M’ M” соответственно.
За точку фазовой траектории принимается точка M1 ,
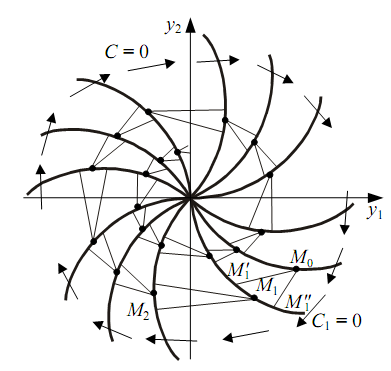
Рисунок 10.2.8 - Построение фазового портрета методом изоклин
лежащая между ними. Повторяя построения таким же образом, но из точки M1, т.е. проводя два отрезка до соседней изоклины под углом γ2= arctgC2 и γ3 = arctgC3 , находится точка M2 и т.д. Точность фазового портрета зависит от числа изоклин, по которым он строится. Особым точкам на фазовой плоскости соответствуют точки пересечения нескольких изоклин, так как в них направление фазовых траекторий становится неопределенным.