

Метод Акульшина
Рассмотрим приближенный метод построения переходного процесса, предложенный Акульшиным. Основное достоинство метода состоит в возможности программирования на ЭВМ.
Сущность метода заключается в следующем. Пусть на вход системы подаются прямоугольные колебания (рис. 7.1.3).
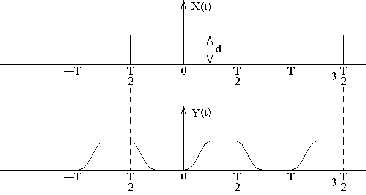
Рисунок 7.1.3 - К расчету переходного процесса методом Акульшина
Период колебаний Т выбирается достаточно большим, так, чтобы переходный процесс в системе заканчивался за половину периода. В этом случае выходная величина в установившемся режиме будет определять последовательность переходных кривых (рис. 7.1.3).
Реакция на ступенчатое воздействие будет практически совпадать с выходной величиной y(t) на первом полупериоде. Входные прямоугольные колебания могут быть разложены в ряд Фурье:
![]() ,
(7.1.4)
,
(7.1.4)
где d – амплитуда входных колебанй;
T – период колебаний;
k = 1, 3, 5, ...
Реакция линейной системы на гармонический сигнал вида
![]() (7.1.5)
(7.1.5)
определяется формулой
 (7.1.6)
(7.1.6)
где A(w), j(w) – амплитудно-частотная и фазо-частотная характеристики системы.
Учитывая, что
![]()
получим:
![]() ,
(7.1.7)
,
(7.1.7)
где Re(w), Jm(w) – вещественная и мнимая частотные характеристики системы.
Учитывая, что реакция системы на постоянную составляющую d/2 равна
![]() ,
(7.1.8)
,
(7.1.8)
получим ( используя принцип наложения ):
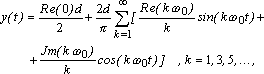 (7.1.9)
(7.1.9)
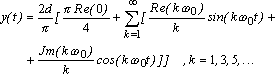 (7.1.10)
(7.1.10)
Выражение (7.1.10) является исходным для построения переходного процесса в системе. При практических расчетах ограничиваются конечным числом членов ряда (7.1.10). Значения Y(t) вычисляют в равноотстоящие дискретные моменты времени t=it. Интервал разбиения t определяется по формуле:
![]() .
(7.1.11)
.
(7.1.11)
Если
выбирать
![]() ,
то за полупериод колебаний получим не
менее 12 точек переходной кривой.
Расчетная формула для построения
переходного процесса может быть записана
следующим образом:
,
то за полупериод колебаний получим не
менее 12 точек переходной кривой.
Расчетная формула для построения
переходного процесса может быть записана
следующим образом:
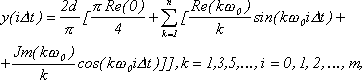 (7.1.12)
(7.1.12)
где Re(w), Im(w) – вещественная и мнимая частотные характеристики замкнутой системы;
d – амплитуда входного сигнала.
Число гармоник n достаточно выбрать в пределах 15-30.
Сложной
задачей является выбор величины
![]() (или периода T). Рекомендуется значение
Т выбирать по формуле [6]:
(или периода T). Рекомендуется значение
Т выбирать по формуле [6]:
![]() ,
(7.1.13)
,
(7.1.13)
где
![]() – рабочая (резонансная) частота,
соответствующая оптимальным настроечным
параметрам.
– рабочая (резонансная) частота,
соответствующая оптимальным настроечным
параметрам.
Формула
(7.1.13) получена из предположения, что
переходный процесс в замкнутой АСР
близок к процессу в колебательном
звене, который заканчивается практически
за 3.5 периода собственных колебаний.
При таком выборе Т седьмая гармоника
ряда (7.1.12) совпадает с резонансной. Для
определения
![]() и Dt получаем формулы:
и Dt получаем формулы:
![]()
![]() ,
,
(7.1.14)
Значения Re(w) и Im(w) в (7.1.12) вычисляются по формулам:
При этом
Исходными
данными для расчета являются значения
параметров
![]() и амплитуда входного воздействия d
(удобно принять d=1 ). При вычислении
ординат переходного процесса по (7.1.12)
вычисляется одновременно и величина
среднеквадратического отклонения по
формуле (7.1.14).
и амплитуда входного воздействия d
(удобно принять d=1 ). При вычислении
ординат переходного процесса по (7.1.12)
вычисляется одновременно и величина
среднеквадратического отклонения по
формуле (7.1.14).