

Задание 4
3.3. Расчет координат центрового профиля
Рассчитываем полярные координаты центрового (теоретического) профиля дискового кулачка с коромыслом (см. рис.3.4)
Радиусы-векторы рассчитываются по формуле:
![]() ,
,
где
![]() - начальное положение коромысла.
- начальное положение коромысла.
Углы по профилю определяются следующим образом:
![]() ,
,
где
![]() ,
,
 .
.

Рис. 3.4. Схема для расчета теоретического профиля дискового кулачка с коромыслом
Рассчитываем полярные координаты центрового (теоретического) профиля дискового кулачка с толкателем (см. рис.3.5)
Радиусы-векторы:
![]()
Углы по профилю:
![]() ,
,
где
![]() при
при
![]()
![]() при
при
![]()
Задание 5

Рис. 3.5. Схема для расчета теоретического профиля дискового кулачка с толкателем
3.4. Выбор радиуса ролика
Радиус ролика Rp назначается согласно соотношению Rp=0.5 крmin из условия отсутствия самопересечения конструктивного профиля кулачка.
Радиус кривизны кр можно определить по общей формуле для кулачка любого типа:
 ,
,
где - радиус-вектор теоретического профиля, – профильный угол.
Для дискового кулачка с качающимся коромыслом удобно применять формулу:
 ,
,
где L – межцентровое расстояние,
l – длина коромысла,
- угол давления,
- угол качания коромысла,
![]() ,
,![]() .
.
3.5. Примеры расчета в MathCad Пример 3.5.1. Синтез кулачкового механизма с толкателем Фазы движения
1:=150 deg 2:=70 deg 3:=110 deg 4:=30 deg
Ход толкателя (в метрах): Smax:=50*10-3
Коэффициенты для законов движения:
![]()
![]()

Предварительно задаем размеры кулачкового механизма (в метрах)
Rp:= 30·10-3 L:=128·10-3
L:= 60·10-3 Rmin:= 90·10-3
Задание 6
1) Определение законов движения
Расчет аналогов ускорений
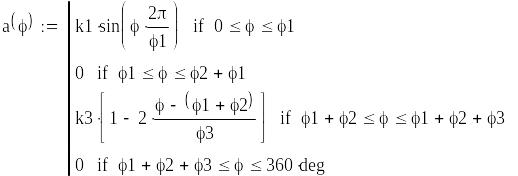

Рис.3.6. Закон изменения ускорений
Расчет аналогов скоростей
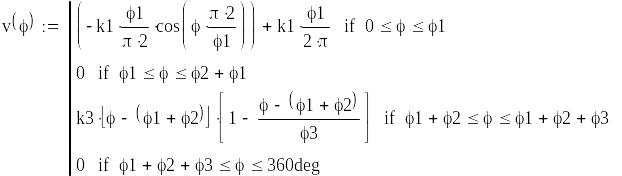
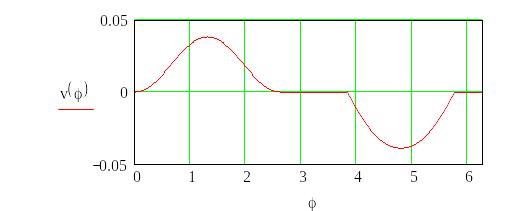
Рис.3.7. Закон изменения скоростей
Расчет перемещений


Рис.3.8. Закон изменения перемещений
Задание 7
2) Определение основных размеров кулачкового механизма из условий ограничения углов давления ()<dop
dop:=30 deg
i1:=0,5 .. 150 i3:=220,225 .. 330


v1i1:=v(f1i1) v3i3:=|v(f3i3)|
v1max:=max(v1) v3max:= - max(v3)
v1max=0.038197 v3max= - 0.039065
v175=0.038197 v3275= - 0.039065
s1i1:=s(f1i1) s3i3:=s(f3i3)
s1max:=max(s1) s3max:= max(s3)
s1max=0.05 s3max=0.05


а) |
б) |
Рис.3.9. Графики в координатах S(v) для фазы подъема (а) и опускания (б)
![]()
2=0



![]()

l31= 0.077262
![]()
e1=0.000434
Принимаем e1:=0
![]()
SH= 0.041911
Принимаем SH:=0.05
![]()
R0=0.05
Проверка условия ()<dop на фазах подъема и опускания
![]()
Фаза подъема (углы): i2:=0,5..75 i3:=80,85..150
Фаза опускания (углы): i4:=220,225..295 i5:=300,305..330
Таблица 3.1
Углы давления на фазе подъема и опускания
i2 |
(f1i2)*180/ |
i3 |
(f1i3)*180/ |
i4 |
(f3i4)*180/ |
i5 |
(f3i5)*180/ |
0 |
0.429 |
80 |
23.916 |
220 |
0.231 |
300 |
-24.527 |
5 |
0.843 |
85 |
23.468 |
225 |
-3.376 |
305 |
-23.746 |
10 |
3.061 |
90 |
20.712 |
230 |
-6.672 |
310 |
-20.139 |
15 |
4.014 |
95 |
18.706 |
235 |
-9.683 |
315 |
-16.572 |
20 |
6.574 |
100 |
16.517 |
240 |
-13.431 |
320 |
-11.941 |
25 |
9.558 |
105 |
14.213 |
245 |
-14.932 |
325 |
-6.228 |
30 |
13.742 |
110 |
11.870 |
250 |
-17.201 |
330 |
0.429 |
35 |
15.891 |
115 |
9.562 |
255 |
-19.240 |
|
|
40 |
18.793 |
120 |
7.367 |
260 |
-21.051 |
|
|
45 |
21.287 |
125 |
5.360 |
265 |
-23.626 |
|
|
50 |
23.271 |
130 |
3.608 |
270 |
-23.949 |
|
|
Продолжение табл. 3.1.
i2 |
(f1i2)*180/ |
i3 |
(f1i3)*180/ |
i4 |
(f3i4)*180/ |
i5 |
(f3i5)*180/ |
55 |
24.695 |
135 |
3.174 |
275 |
-25 |
|
|
60 |
25.553 |
140 |
1.108 |
280 |
-25.743 |
|
|
65 |
25.865 |
145 |
0.452 |
285 |
-26.135 |
|
|
70 |
25.665 |
150 |
0.230 |
290 |
-26.116 |
|
|
75 |
25 |
155 |
|
295 |
-25.612 |
|
|
Условие ()<dop выполняется.