

1. Визначення передатного відношення і переміщення в різних видах передач.
Відношення частоти обертання (кутової швидкості) n 2 веденого вала до частоти обертання п 1 ведучого вала називають передаточним відношенням:
i = п 2 / п 1.
Пасова передача. Передаточне відношення без урахування ковзання паса (мал. 1.1, а)
i = п 2 / п 1.= d 1 / d 2
звідки
п 2 = п 1 d 1 / d 2
або
п 1 = п 2 d 2 / d 1,
де n 1 і n 2 - діаметри відповідно ведучого і веденого шківів.
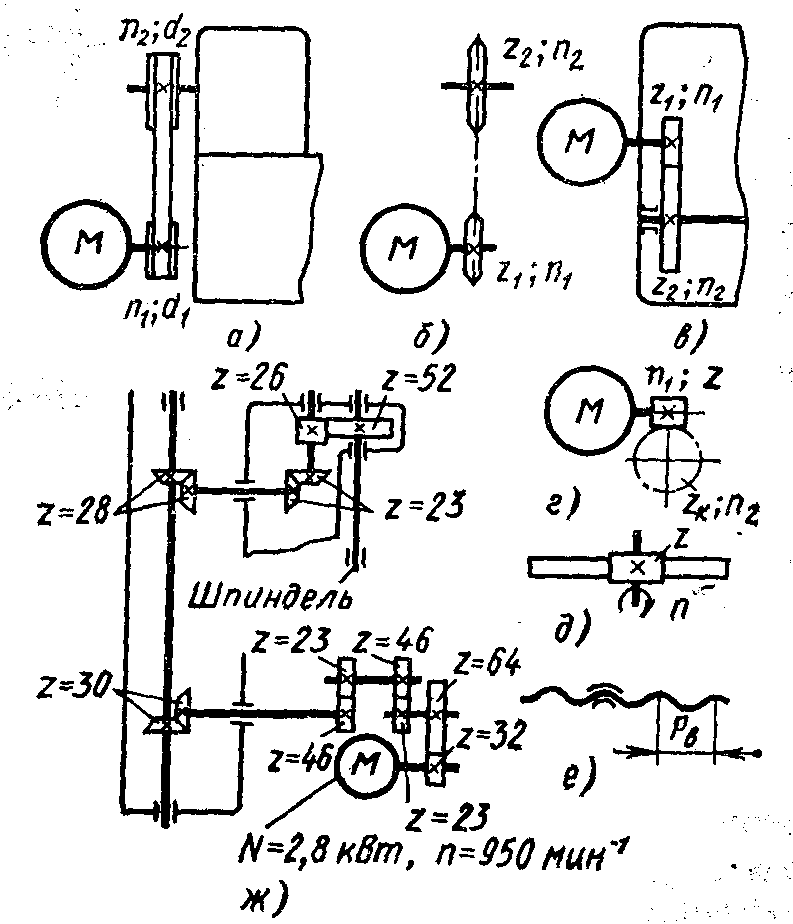
Рис. 1.1. Передачі у верстатах
Ковзання паса враховують, ввівши поправочний коефіцієнт, що дорівнює 0,97-0,985.
Ланцюгова передача. Передаточне відношення (мал. 1.1, б)
i = п 2 / п 1 = z 1 / z 2
звідки
n 2 = n 1 z 1 / z 2,
де z 1 і z 2 - числа зубів відповідно ведучої і веденої зірочок.
Зубчаста передача (мал. 1.1, в), що здійснюється циліндричними або конічними зубчастими колесами. Передаточне відношення:
i = п 2 / п 1 = z 1 / z 2
звідки
n 2 = n 1 z 1 / z 2,
де z 1 і z2 - Числа зубів відповідно ведучого та веденого зубчастих коліс.
Черв'ячна передача. Передаточне відношення (мал. 1.1, г)
i = п 2 / п 1 = Z / z k
звідки
n 2 = n 1 Z / z k,
де Z - число заходів черв'яка; z к - число зубів черв'ячного колеса.
Рейкова передача. Довжина прямолінійного переміщення рейки за один оберт рейкового зубчастого колеса (мал. 1.1, д)
L = z*p = z*π*m
де р = π * т - крок зуба рейки, мм; z-число зубів рейкового зубчастого колеса; т - модуль зубів рейкового зубчастого колеса, мм.
Гвинт і гайка. Переміщення гайки за один оберт гвинта (рис. 1.1, е)
L = Zp в ,
де Z - число заходів гвинта; р в - крок гвинта, мм.
Передаточне відношення кінематичних ланцюгів. Розрахунок частоти обертання і крутний момент.
Для визначення загального передаточного відношення кінематичного ланцюга (рис. 1.1, ж) необхідно помножити між собою передаточні відношення окремих передач, що входять в цей кінематичний ланцюг:

 .
.
Частота обертання останнього веденого вала дорівнює частоті обертання ведучого вала, помноженої на загальне передаточне відношення кінематичного ланцюга:
п = 950iзаг.
тобто п
= 950
 ≈ 59,4 хв -1.
≈ 59,4 хв -1.
Крутний момент на шпинделі М тп залежить від передаточного відношення кінематичного ланцюга від електродвигуна до шпинделя. Якщо електродвигун розвиває момент М дв, то
М шп = Мдв ή / iзаг
або
М ши = 9560N ДВМ ή / i 'заг ή дв
де iзаг – передаточне відношення кінематичного ланцюга від електродвигуна до шпинделя; N дв і n дв - відповідно потужність (кВт) і частота обертання (хв -1) вала електродвигуна; ή - ККД кінематичного ланцюга від електродвигуна до шпинделя.
2. Ряди частот обертання шпинделя, подвійних ходів та подач у верстатах.
У верстатів з обертальним головним рухом частота обертання шпинделя, хв -1
п = 1000v / π d,
де V - швидкість різання, м / хв; d - діаметр оброблюваної заготовки або інструменту, мм.
Для отримання найвигідніших умов при обробці заготовок з різних матеріалів інструментами з різними ріжучими властивостями верстати повинні забезпечувати зміну швидкостей різання від v min до v mах . Так як у процесі заготовки або встановлювані на верстаті інструменти можуть мати діаметри в межах від dmin до d mах, необхідно мати можливість встановлювати різну частоту обертання шпинделя в межах від n minдо n max:
nmin= 1000 vmin/π d mах;
nmax= 1000 vmax/π d min.
Відношення максимальної частоти обертання шпинделя верстата до мінімальної називають діапазоном регулювання частоти обертання шпинделя:
nmax/ nmin=D.
Діапазон регулювання шпинделя характеризує експлуатаційні можливості верстата. У зазначених межах можна отримати будь-яке значення п, якщо мати механізм безступінчатого регулювання швидкості головного руху. У цьому випадку можна встановити частоту обертання, відповідну вибраної найвигіднішою швидкості різання при заданому діаметрі. Однак безступінчатий приводи, незважаючи на їх досить значного поширення в сучасних верстатах, застосовують не так широко, як приводи із ступінчастим рядом частоти обертання шпинделя. Більшість верстатів має ступінчасті ряди частот обертання. У цьому випадку замість частоти обертання, точно найвигіднішою швидкості різання при даному діаметрі, доводиться брати найближчу меншу частоту. Цій дійсній частоті п д буде відповідати дійсна швидкість різання v д = πdn д / 1000, що менше розрахункової на величину V – Vд. Тоді відносна втрата швидкості різання при переході з однієї частоти обертання до найближчої меншо
A=(v-vд)/v=(πdn- πdnд)/ πdn=(n-nд)/n.
Отже, відносна втрата швидкості різання буде тим менша, чим менша різниця п - п д.
В інтервалі між граничними значеннями частоти обертання п тах і nmin проміжні частоти можна розмістити по різних рядах. Однак не всі можливі ряди будуть рівноцінними. Найбільш раціональним для застосування в верстатобудуванні є геометричний ряд, в якому кожна наступна частота відрізняється від попередньої в φ раз (де φ - знаменник ряду).
Головною перевагою геометричного ряду є те, що максимальна відносна втрата швидкості різання залишається однаковою для всіх інтервалів ряду частоти обертання. Це дозволяє забезпечити постійність максимальної відносної втрати продуктивності формоутворення верстата, тобто дає економічні переваги в порівнянні з іншими рядами. Продуктивність формоутворення визначається площею поверхні, що обробляється на верстаті в одиницю часу.
Геометричний ряд частот обертання шпинделя зі знаменником φ буде мати такий вигляд:
n1= nmin;
n2 =n1φ;
n3= n2φ;
……..
nz =nz-1φ=n1φz-1.
Значення знаменників рядів φ нормалізовані. Це дозволяє нормалізувати ряди частот обертання і подач, а також полегшити кінематичний розрахунок верстатів. Значення знаменників φ нормальних рядів частот обертання шпинделів верстатів встановлені з урахуванням наступних міркувань.
1. У приводі головного руху верстатів часто застосовують багато прискорені електродвигуни трифазного струму з відношенням частот обертання, рівним 2. Для того щоб частоти обертання шпинделя, одержувані при різних частотах таких електродвигунів, були членами геометричного ряду, необхідно мати
φ= ,
,
де Е1 - ціле число.
2. Обов'язково має бути врахований державний стандарт бажаних чисел і рядів переважних чисел. Ряди бажаних чисел побудовані у вигляді геометричних прогресій, знаменники яких повинні задовольняти вимогу
φ= ,
,
де Е 2 - ціле число.
Таким чином, стандартні значення знаменника φ рядів
частоти обертання можуть бути знайдені з умови φ= = . Отже Е1=3Е́' і Е2=10 Е́' , де Е '- довільне ціле число.
Для передбачених стандартом чотирьох значень Е 2 == 40; 20; 10 і 5, яким відповідають Е '= Е 2 / 10 = 4; 2; 1 і 0,5 і Е1 = ЗЕ' = 12; 6; 3 і 1,5, отримують наступні значення φ:
φ40= φ20=
φ20=
φ10= φ5=
φ5=
Для практичного застосування зазначених чотирьох значень
виявилося
недостатньо. Тому додані φ= φ=
φ=
Внаслідок того, що знаменник φ пов'язаний з числом 2, через певну кількість членів ряду кожне число збільшується в 2 рази. Якщо, наприклад, у ряді є число 2, то будуть числа 4, 8, 16 і т. д. Цій закономірності не підвласні ряди з φ=1,58 і φ=1,78.
У зв'язку з тим, що φ пов'язані з числом 10, кожне число ряду збільшується через певну кількість членів ряду в 10 разів. Наприклад, за наявності у ряді числа 2,8 зустрінуться також числа 28, 280, 2800 і т.д. Ця закономірність десяткового повторення чисел не розповсюджується на ряди з φ = 1,41 і φ = 2.
Нижче наведені значення максимальної відносної втрати швидкості різання А mах між двома сусідніми частотами обертання для відповідних значень φ = 1,06; 1,12; 1,26; 1,41; 1,58; 1,78; 2: A mах = 5; 10; 20; 30; 40; 45; 50%.
Amax= ( vz-vz-1)/vz=(nz-nz-1)/nz=1-nz-1/nz=1-n1φz-2/(n1φz-1)=1-1/φ=(φ-1)φ
або
Amax=[(φ-1)/φ]100%.
У табл. 2.1. приведені нормальні ряди частот обертання, що застосовуються в верстатобудуванні.
Нормальні ряди частот обертання, що застосовуються в верстатобудуванні