

4.4. Модели систем типа Мс
Рассмотрим несколько видов классификационных признаков и соответствующие классы моделей, не претендуя на попытку обоснования их выбора. Заметим только, что сочетания различных классификационных признаков могут образовывать достаточно большое разнообразие практически выделяемых классов моделей.
Аппроксиматоры, называемые также в литературе «черными ящиками» (blackbox),«формальными моделями», являются разновидностью математических моделей, описывают функциональные связи между входами и выходами моделируемой системы без учета (при отсутствии) каких-либо знаний о топологии системы. Коэффициенты таких моделей могут не иметь какого-либо физического смысла, не соотносятся, например, с технологическими параметрами процессов. В этом заключается недостаток таких моделей. Однако, эти модели эффективны в случае невозможности или трудности построения строгих математических описаний поведения систем.
Распространенными примерами таких моделей являются нейронные сети(НС).
Механистические модели. Если знания о функционировании модели формализованы, то для описания таких моделей могут быть использованы механистические модели (ММ), к числу которых относят:
- алгебраические модели (АМ), представляющие собой системы алгебраических и трансцендентных уравнений,
- дифференциальные уравнения (ДУ) и системы ДУ,
- передаточные функции (ПФ),
- логические модели (ЛМ) и др.
Такие модели обычно получают путем анализа физических и химических основ моделируемых процессов. Результатом анализа является прямая илиобратнаямодель процесса. Прямая модель отражает влияние входных координат процесса на выходные и может быть представлена в виде функции
Y=F(X),
где Х и Y- множества входных (в том числе управляющих) и выходных координат соответственно.
В ряде случаев необходимым является получение обратной модели вида
X=Q(Yн),
где Yн- множество наблюдаемых или измеряемых значений выходных координат процесса. В большинстве случаев построение обратных моделей является некорректной задачей, т.е. имеющей более одного решения или вообще его не имеющей.
Статистические моделиявляются технологией построения моделей путем описания свойств процесса через статистические переменные и соответствующие статистические оценки этих переменных. По своей сути эти модели содержат элемент неопределенности.
Модели, согласно этой технологии, строятся с использованием методов статистического анализа, теории игр, теории информации и т.п.
Разновидностями данных моделей являются вероятностныеикорреляционныемодели. Вероятностные модели используют плотности вероятности переменных процесса. При этом наиболее часто используются нормальный и экспоненциальный законы распределения. Использование таких моделей ограничено тем, что при числе переменных более двух требуется большое число экспериментов, возникают трудности, связанные с коррелируемостью параметров.
Динамическиемоделии характеристики описывают поведение систем в динамике, т.е. во времени.
Наиболее часто динамические модели представляются линейными и нелинейными дифференциальными уравнениями, разностными уравнениями в частных производных, операторными уравнениями, передаточными функциями и др.
Линейныминазываются элементы, для которых справедлив принцип суперпозиции:
(х1+ х2) =(х1) +(х2),
где - некоторый оператор.
Таким свойством обладают операторы суммирования, интегрирования, дифференцирования.
При исследовании динамических свойств систем может быть использованы прикладные математические методы операционного исчисления. Например, функционирование некоторой системы описывается ДУ вида
![]() , (4.14)
, (4.14)
где х и у - входная и выходная величины. Если в данное уравнение вместо x(t) иy(t) подставить функцииX(s) иY(s) комплексного переменногоsтакие, что
![]() и
и![]() , (4.15)
, (4.15)
то ДУ (4.14) при нулевых начальных условиях равносильно линейному алгебраическому уравнению
a2 s2 Y(s) + a1 s Y(s) + a0 Y(s) = b1 X(s) + b0 X(s).
Такой переход от ДУ к алгебраическому уравнению называетсяпреобразованием Лапласа, формулы (2.2) соответственноформулами преобразования Лапласа, а полученное уравнение -операторным уравнением.
Новые функции X(s) иY(s) называютсяизображениямидляx(t) иy(t) по Лапласу, тогда какx(t) иy(t) являютсяоригиналамипо отношению кX(s) иY(s).
Переход
от одной модели к другой заключается в
замене знаков дифференциалов
![]() на операторыsn,
знаков интегралов
на операторыsn,
знаков интегралов![]() на множители
на множители![]() ,
а самихx(t)
иy(t) -
изображениямиX(s)
иY(s).
,
а самихx(t)
иy(t) -
изображениямиX(s)
иY(s).
Для обратного перехода от операторного уравнения к функциям от времени используется метод обратного преобразования Лапласа. Общая формула обратного преобразования Лапласа:
![]() ,
,
где f(t) - оригинал,F(j) - изображение приs=j,j- мнимая единица,- частота.
Преобразование ДУ по Лапласу дает возможность ввести понятие передаточной функции, характеризующей динамические свойства системы.
Например, операторное уравнение
3s2Y(s) + 4sY(s) +Y(s) = 2sX(s) + 4X(s)
можно преобразовать, вынеся X(s) иY(s) за скобки и поделив друг на друга:
Y(s)*(3s2+ 4s+ 1) =X(s)*(2s+ 4),
![]() .
.
Полученное выражение называется передаточной функцией.
Передаточная функция- это отношение изображения выходного воздействияY(s) к изображению входногоX(s) при нулевых начальных условиях:
![]() .
.
Передаточная функция для линейных элементов часто является дробно-рациональной функцией комплексной переменной:
 ,
,
где B(s) = b0 + b1s + b2 s2 + … + bm sm - полином числителя,
А(s) = a0 + a1s + a2 s2 + … +ansn- полином знаменателя.
Если вместо sподставить выражениеs=j., получаем преобразование Фурье, которое характеризует связь между частотными характеристиками входных и выходных сигналов элемента. Частотные характеристики дают возможность анализировать описание системы с учетом динамики.
В последнее время более широко используется описание динамики систем методом пространства состояний.
Для описания динамики элементов систем используется в данном методе матричная запись ДУ:
![]() , (4.16)
, (4.16)
где А – матрица коэффициентов, U– матрица входов или управлений, Х – матрица пространства состояний:
Х = (х1, х2, … хn)Т.
В данном случае хiназывается переменной состояния или фазовой переменной («Т» – символ транспонирования).
Предположим, что динамические свойства объекта описываются ДУ вида
![]() ,
(4.17)
,
(4.17)
где aiиbi– коэффициенты, у – выходной сигнал,u– входной сигнал объекта.
Если ввести переменные состояния:
![]()
![]()
![]() и т.д.,
и т.д.,
то левая часть ДУ (4.17) примет вид (после деления на (-аn ):
![]() .
.
Можно записать уравнение в матричном виде:
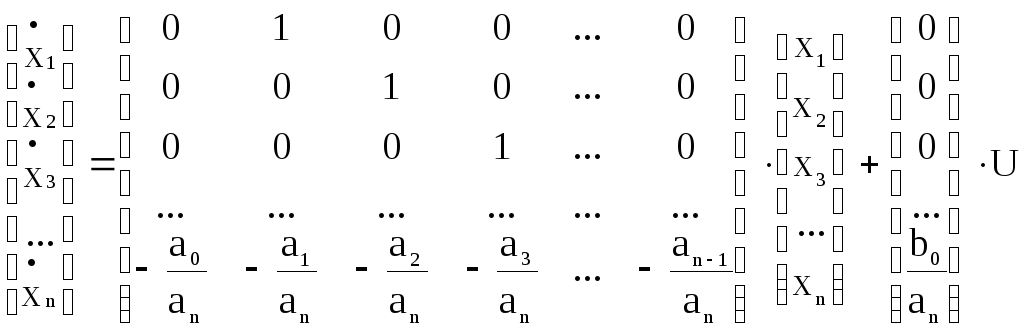 .
.
Решением полученного матричного уравнения является матрица Х.
Для определения выходных параметров yiуравнение (4.16) дополняется уравнением
Y=C.X+D.U,
где С (pn) – матрица связей,D(pq) – матрица обхода,p– число выходных параметров уi,q– число входных параметровui.
Решение матричных уравнений для некоторых случаев может быть произведено аналитически, в частности, для однородного ДУ вида
![]() . (4.18)
. (4.18)
Прямое преобразование Лапласа для данного уравнения дает
s.X(s) –X0=A.X(s),
где Х0– матрица начальных условий, т.е. начальные условия по переменной у, по скорости ее изменения, ускорению и т.д. Отсюда получено
Х(s) =X0.[s.E–A]-1= Ф(s).X0,
где Е – единичная матрица, Ф(s) – изображение фундаментальной матрицы
Ф(s) = [s.E–A]-1.
Оригиналом фундаментальной матрицы является матричный экспоненциал
![]() .
.
Тогда решение ДУ (4.18) можно получить в виде ряда с шагом tпо времени:
Х0– начальные условия,
Х(t) = Ф(t).Х0,
Х(2.t) = Ф(2.t).Х(t) и т.д.
Качественные модели
Существует множество примеров, когда природа процессов принятия решений или функционирования объекта не может быть описана в виде математических соотношений в виду наличия нечетких определений и лингвистических операций или ограничений на технологические параметры и т.д.
Решением этой проблемы является использование качественных моделей, которые наиболее часто представляются в терминах нечетких множеств.