

Контрольные вопросы
С какой целью выполняют оптимизацию системы техническо-го обслуживания автотранспортных средств на предприятии?
Перечислите варианты организации обслуживания автомоби-лей на современных автотранспортных предприятиях.
11
Какие исходные данные необходимы для оптимизации систе-мы технического обслуживания автомобилей на автотранспортных предприятиях?
Какие параметры системы технического обслуживания отно-сят к управляемым?
Поясните физический смысл параметра интенсивность об-служивания автомобилей на посту.
Назовите преимущества поточного метода обслуживания ав-томобилей.
Каковы критерии применения поточного метода обслужива-ния автомобилей на предприятии?
Перечислите факторы, оказывающие влияние на величину ко-эффициента выпуска автомобилей на линию.
9. Что характеризует параметр max ?
Лабораторная работа № 2
РЕШЕНИЕ ЗАДАЧ МАРШРУТИЗАЦИИ МЕТОДОМ ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Цель работы: изучить процесс построения динамической моде-ли выбора кратчайшего пути на ориентированной сети, а также полу-чить практические навыки решения задач по маршрутизации.
Общие положения
Динамическое программирование (ДП) представляет собой ма-тематический метод оптимизации, позволяющий осуществлять опти-мальное планирование многошаговых (многоэтапных) управляемых процессов, и прогрессов, зависящих от времени.
Задачи, решаемые методами ДП, формируются следующим об-разом. Имеется управляемый процесс, заданы его начальное и конеч-ное состояния. Требуется определить значение факторов его состоя-ния, обеспечивающих получение оптимума функции процесса в це-лом.
Методом ДП с успехом можно решать задачи, сводящиеся к се-тевым моделям, такие как транспортные, задачи замены оборудования,
12
управления запасами и другие, в которых требуется найти кратчайший путь на ориентированной сети.
Процесс решения задачи ДП включает следующие операции:
Исследуемый процесс разбивается искусственно или естест-венно на составные элементы – этапы.
Для каждого этапа вводят функциональные характеристики (параметры или переменные) процесса и их числовые значения. За-тем выделяют управляющие факторы, с помощью которых можно влиять на развитие процесса.
Для каждого этапа устанавливается такой уровень управле-ния, который обеспечивает оптимальность функционирования процес-са в целом.
Принципы и методы ДП рассмотрим на примере задачи выбора кратчайшего маршрута на транспортной сети.
Построение динамической модели выбора кратчайшего пути
Пусть задана ориентированная сеть, содержащая N точек (узлов). Найти кратчайший путь из точки 1 в точку N (рис. 2.1), если задана матрица (аij) расстояний из точки i в точку j.
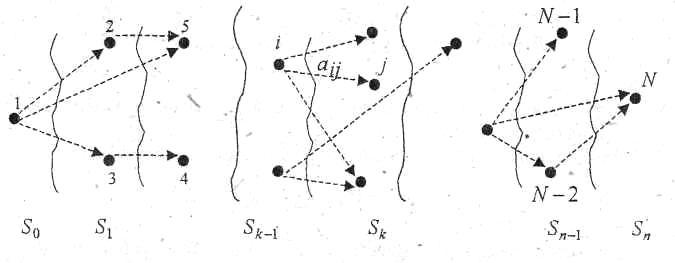
Рис. 2.1. Ориентированная сеть
Обозначим через W *j минимальный путь из точки i в точку N. Оптимальный маршрут из любой точки i должен обладать тем свой-ством, что каков бы ни был способ достижения пункта i, последую-щее решение должно быть оптимальным для части пути, начинающе-гося в точке i (принцип оптимальности).
Пусть из точки i можем перейти в току j, расстояние между эти-ми точками равно аij. Точка j должна выбираться таким образом, что-
13
бы путь из j в N был частью оптимального из i в N. Обозначим мини-мальный путь из j в N через W *j. Тогда i выбирается из условия ми-нимизации суммы
aij + W*j.
Таким образом, получаем уравнение Беллмана:
Wi* minaij W j*. j i
(2.1)
(2.2)
Для реализации уравнения (2.2) разделим условно все точки се-ти на n множеств по числу шагов 1, 2, …, n (см. рис. 2.1). К множест-ву S0 отнесем точки, из которых можно попасть в N не более чем за n шагов, к Si точке из которых можно попасть в N не более чем за n – 1 шагов и т. д.
Если i ϵ Sk-1, то будем считать, что j ϵ Sk. Тогда уравнение (2.3) примет вид
-
*
(i )
min
*
(2.3)
Wk
aij Wk 1( j).
i Sk 1
j Sk
Так как точка N единственная и относится к множеству Sn, тогда
W *n+1 (N) = 0. (2.4)
Множество Sn-1 состоит из точек i, из которых можно попасть в N не более чем за один шаг, поэтому
-
Wn* (i ) min ain ain ,
U n*(i ) N ,
(2.5)
i Sn1
где U *n(i) – условные оптимальные управления (решение) на n-м пе-реходе из точки i в N по кратчайшему пути.
Аналогично для точек i ϵ Sn-2:
-
*
min
*
( j )
*
1(i) (2.6)
Wn 1 (i )
aij Wn
min aij a jN , U n
i S n 2
i Sn2
j S n 1
j Sn1
и т. д. В итоге условной оптимизации получим совокупность услов-ных оптимальных решений U *k(i), используя которые последователь-но определим точки, соответствующие оптимальному маршруту.
14