

Перевод справки пакета SimPowerSystems программы Matlab / powersysSmall
.pdfТак как процесс гашения тока GTO–тиристора вноситсущественный вклад в потери на выключение, характеристика выключения включена в модель. Ток уменьшается, аппроксимировано по двум кривым. Когдасигнал управления становится равным нулю, ток Iak сначала уменьшается отзначения Imax (значение Iak, когда GTO тиристор начинаетоткрыться) к Imax/10, в течение времени спадания (Tf), а затем отImax/10 до нуля в течение времени конечной фазы (Tt). GTO–тиристор выключается, когда ток Iak становится равным нулю. Токи запирания и блокирования не рассматриваются.
Vf, Ron, и Lon — прямое падение напряжения при проводимости, сопротивление прямой проводимости и индуктивность прибора, соответственно.
261

Диалоговое окно ипараметры:
Resistance Ron: Внутреннее сопротивление Ron, в Омах (Ом).
Inductance Lon: Внутренняя индуктивность Lon, в генри (Гн). Параметр Inductance Lon (индуктивность Lon) не можетбыть установлен в 0.
Forward voltage Vf: Прямое напряжение GTO–тиристор, в вольтах (В). Current 10% fall time: Время спада тока Tf, в секундах (с).
Current tail time: Время последней фазы спада тока Tt, в секундах (с).
262
Initial current Ic: Вы можетопределить начальный ток GTO–тиристора. Он обычно устанавливается равным нулю, чтобы начать моделирование с заблокированным GTO–тиристором.
Вы можете определить значение начального тока Ic , соответствующее специфическому режиму схемы. Втаком случае всесостояния линейной схемы должны быть установлены соответственно. Инициализация всех состояний силовых электронных преобразователей — сложная задача. Поэтому, этотпараметр полезен только для простых схем.
Snubber resistance Rs: Сопротивление демпфирующего устройства, в Омах (Ом). Установите параметр Snubber resistance Rs (сопротивление демпфирующего устройства Rs) в inf (бесконечность), чтобы убрать демпфирующее устройство из модели.
Snubber capacitance Cs: Емкость демпфирующего устройства в фарадах (Ф). Установите параметр Snubber capacitance Cs (емкость демпфирующего устройства Cs) в 0, чтобы убрать демпфирующее устройство из модели, или на inf (бесконечность), чтобы получить чисто активное демпфирующее устройство.
Входы и выходы:
Первый вход и выход — терминалы GTO–тиристора, соединенные соответственно с анодом (a) и катодом (k). Второй вход (g) – Simulink сигнал управления. Второй выход (m) — Simulink вектор выходных измерений [Iak, Vak], возвращающий ток и напряжение GTO–тиристора.
Допущения и ограничения:
Блок GTO (запираемый тиристор) — это макромодель реального GTO- тиристора. Она не учитываетни геометрию устройства, ни основные физические процессы устройства [1].
Блок GTO (запираемый тиристор) требует, непрерывное включение сигнала управления (g > 0), чтобы быть в режиме включения (с Iak > 0). Токи запирания и блокирования не рассматриваются. Критическое значение производной прикладываемой к анодно-катодному напряжению не рассматривается.
Блок GTO (запираемый тиристор) моделируется как источник тока. Он не можетбыть соединен последовательно с катушкой индуктивности, источником тока, или разомкнутой цепью, еслисхема демпфирующего устройства исключена из модели. Чтобы избежать алгебраического контура, индуктивность Lon блока GTO (запираемый тиристор), не можетбыть равна нулю.
Каждая блок GTO (запираемый тиристор) добавляетдополнительный режим (состояние) к электрической модели схемы. См. главу «Расширенные темы» для подробного рассмотрения темы.
Вы должны использовать жесткий алгоритм интегрирования, чтобы моделировать схемы, содержащие блоки GTO (запираемый тиристор). Ode23tb или ode15s с параметрами по умолчанию обычно даютлучшую скорость моделирования.
263
Пример:
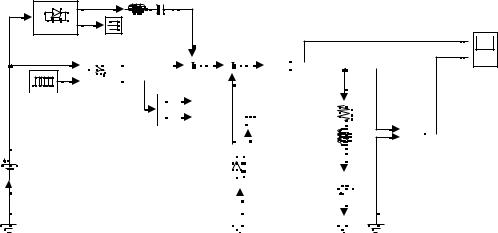
Следующий пример иллюстрируетиспользование блок в топологии обратного преобразователя. Поляризованная схема демпфирующего устройства соединена параллельно блоку GTO (запираемый тиристор). Схема демпфирующего устройства состоитиз конденсатора Cs, резистора Rs и диода Ds.
Паразитная индуктивность Ls схемы демпфирующего устройства также учтена.
Параметры блока GTO (запираемый тиристор) — те которые показаны выше в диалоговом окне, кроме внутреннего демпфирующего устройства, которое не используется (Rs=Inf, Cs=0).
Частота переключений – 1000 Гц, ширина пульса – 216 градусов (60 % рабочего периода). Этот пример доступен в файле psbbuckconv.mdl.
Polarized s nubber (Ds , Rs,Cs)
k |
|
|
a |
Ls |
Cs |
m |
||
Ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
a |
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
m |
|
|
|
|
|
|
Lo ad curren t |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P ulse |
|
GT O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Generator |
|
|
|
m |
Iak |
|
|
|
|
|
|
|
|
|
|
|
|
|
R_Load |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
Vak |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Scope1 |
|
|
|
|
|
|
|
|
|
|
L_Load |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
m |
|
|
|
|
|
|
|
||||
U = 200 V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FW Di od e |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
E = -8 0V |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iload 

Vload 
Scope2
+ |
v |
|
- |
|
|
|
|
L oa d vo l tag e
GTO Thyristor in the buck conv erter topology |
|
|
? |
|
Double click on the More Info button (?) button for details |
|
|
|
|
M |
ore Info |
|||
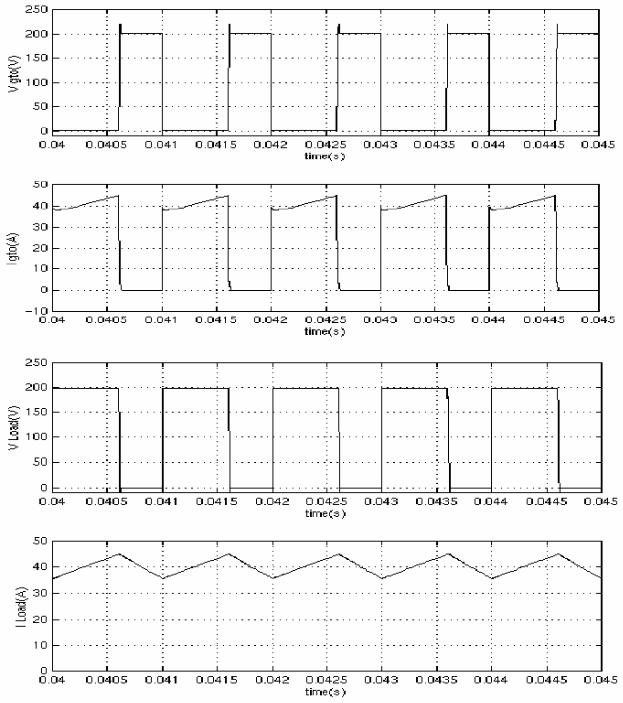
Запустите моделирование. Посмотрите напряжение и ток блока GTO (запираемый тиристор), а также напряжение ток нагрузки.
264
Литература
[1] Mohan N., Power Electronic, Converters, Applications and Design, John Wiley & Sons, Inc., New York, 1995
См. также: Diode (диод), Thyristor (тиристор), Mosfet (канальный полевой униполярный МОП– транзистор), Ideal Switch (идеальный выключатель)
265

Hydraulic Turbine and Governor (гидравлическая турбина и регулятор)
Назначение: Моделируетгидравлическую гидротурбину и ПИДрегулятор.
Библиотека: Machines (машины)
Описание: Блок Hydraulic Turbine and Governor (гидравлическая тур-
бина и регулятор) моделируетнелинейную гидравлическую модель гидротурбины, ПИД – регулятор, и серводвигатель [1].
Гидравлическая турбина смоделирована следующей нелинейной систе-
мой.
Вентильный серводвигатель смоделирован устройством второго заказа порядка.
266

Диалоговое окно ипараметры:
Servo-motor: Постоянная Ka и постоянная времени Ta, в секундах (с), устройство первого порядка, представляющее серводвигатель.
Gate opening limits: Пределы gmin и gmax (о.е.) сигнала управления и vgmin и vgmax (о.е. /с) скорости управления.
Permanent droop and regulator: Статический коэффициентрегулятора равен инверсии постоянной статического отклонения Rp в контуре обратной связи. ПИД-регулятор имеет пропорциональную составляющую Kp, интегральную составляющую Ki и производную составляющую Kd. Высокочастотное увеличение ПИД-регулятора ограничивается фильтром низких частотпервого порядка с постоянной времени Td (с).
267

Hydraulic turbine: Демпфирующий коэффициентотклонения скорости b и время пуска воды Tw (с).
Droop reference: Определяетвход контура обратной связи: положение заслонки (установлено на один) или электрическое отклонение мощности (установлено на ноль).
Initial mechanical power: Начальная механическая мощность Pm0 (о.е.) на валу машины. Это значение можетбыть вычислено утилитой load flow (потокораспределение) блока Powergui.
Входы и выходы:
Первые два входа — желаемая скорость и механическая мощность. Третий и четвертый вход — действительная скорость машины и электрическая мощность. Пятый вход — отклонение скорости. Входы 2 и 4 могутбыть оставлены без соединения, если желаете использовать положение заслонки как вход контура обратной связи вместо отклонения мощности. Все входы в о.е.. Выходы блока — механическая мощность Pm для блока Synchronous Machine (синхронная машина) и открытие заслонки (оба в о.е.).
Пример:
Этотпример иллюстрирует использование синхронной машины, соединенной с блоком Hydraulic Turbine and Governor (гидравлическая турбина и регулятор) (HTG) и блоком Excitation System (устройство возбуждения). Он также демонстрируетиспользование Load Flow (потокораспределение) для инициализации токов машины. Трехфазный генератор номинальной мощностью 200 МВА, 13.8 кВ, 112.5 оборотов в минуту, соединен с 230 кВ электрической сетью через 210 МВАтрансформатор, соединение обмоток у которого — треугольник–звезда. Короткое замыкание электрической сети устанавливает– 10000 ВА, и трансформатор имеет0.16 о.е. реактивное сопротивление утечки. Устройство запускается с установившегося режима, с генератором, вырабатывающим 150 МВтактивной мощности. При t=0.1 с, происходиттрехфазное замыкание на землю, на 230 кВшине трансформатора. Короткое замыкание отключается после шести периодов (t=0.2 с). Откройте диаграмму Simulink, напечатав psbturbine.
Чтобы начинать моделирование для установившегося режима, Вы должны инициализировать блок Synchronous Machine (синхронная машина) для желаемого load flow (потокораспределения). Откройте powergui, и в меню
Tools (инструменты) выберите Load flow and machine initialization (потоко-
распределение и инициализация машины). Bus Type (тип шины) машины должен быть уже инициализирован как «PV генератор», указывая на то, что load flow (потокораспределение) будетвыполнено с машиной, управляющей активной мощностью и напряжением на зажимах. Определите желаемые значения, вводя вследующие параметры:
U AB (Vrms) = 13800
P (watts) = 150e6
268

1  wref
wref
0.751 6 |
|
|
|
Pref |
Pm |
|
|
|
|
||
|
|
|
|
|
|
we |
A |
|
|
Pe0 |
Pm |
gate |
B |
dw |
|
|
|
C |
|
|
HT G |
Vf |
|
|
m _pu |
||
1 .0 |
vref |
||
Synchro nou s M achi ne |
|||
|
|
||
m |
vd |
2 00 M VA 13 .8 kV |
|
vq |
Vf |
||
|
|
||
|
vstab |
|
|
|
|
Vf (p u) |
|
|
Exci ta ti o n |
||
|
Syste m |
||
Iab c (pu ) |
is_abc |
|
|
|
v s_qd |
|
|
|
wm |
m |
|
|
dw |
|
|
|
Peo |
|
|
A B C
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
v |
|
|
|
|
|
|
|
-K- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V a |
|
|
|
|
|
Vol ts>p u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
Va (p u) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
F aul t |
|
||
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ABC |
|
|||||
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
||
|
|
|
|
|
|
|
|
|
|
T hree -p hase |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3-Pha se Fa ul t |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
T ran sform er |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
5 M W |
2 10 M VA 13 .8 kV/2 30 kV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
A |
B |
C |
10 00 0 M VA, 2 30kV
sou rce |
A B C |
10 M W
|
|
|
|
|
|
|
M ach in es |
|
|
|
|
|
|
M e asu rem en t |
|||
Spe ed (p u) |
|
|
De m ux |
|||||
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Po wergu i |
|
|
|
|
|
|
|
|
-Conti nu ous |
|
Synchron ous g enerator powe red by hydraulic turbine |
|
|
? |
|
|
|
|
||
with excitation and governor systems |
|
|
|
|
Double click on the More Info button (?) for details |
M ore Info |
|||
Потом нажмите кнопку Do Load flow. Как только load flow (потокораспределение) будетрешено, фазы AB и BC напряжения машины, также как токи, вытекающие из фаз А и B обновятся. Реактивная мощность машины, механическая мощность, и напряжение возбуждения, требуемые для получения нужной электрической мощности должны быть равны:
Q = 3.4 Mvar
Pmec=150.32 MW (0.7516 p.u.)
Field voltage (напряжение возбуждения) Ef = 1.291 p.u.
Чтобы начинать моделирование для установившегося режима два Simulink блока, HTG и Excitation System (устройство возбуждения), должно быть инициализированы согласно значениям, рассчитанным load flow (потокораспределением). Откройте меню блока HTG , и заметьте, что начальная механическая мощность была установлена в 0.5007 о.е. (100.14 МВт). Потом, откройте меню блока Excitation System (устройство возбуждения), и обратите внимание на то, что начальное напряжение на зажимах и напряжение возбуждения были установлены соответственно в 1.0 о.е. и 1.126 о.е. Откройте 4 scopes (измерителя), и запустите моделирование. Моделирование начнется для установившегося режима.
269
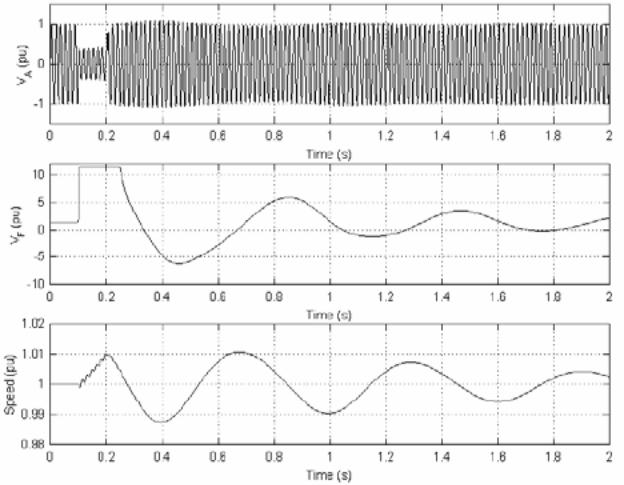
Напряжение на зажимах Va, в начале моделирования — равно 1.0 о.е. Оно падаетприблизительно к 0.4 о.е. в течение короткого замыкания и быстро возвращается к номиналу после того, как короткое замыкание разомкнется. Это быстрое возвращение напряжения на зажимах к номиналу происходит, вследствие того, что выходное напряжение устройства возбуждения Vf можетповышаться до 11.5 о.е., как это и происходитв течение короткого замыкания. Скорость машины увеличивается до 1.01 о.е. в течение короткого замыкания, потом она колеблется вокруг 1 о.е., в точности как регулируетеё регулятор. Скорость стабилизируется дольше, чем напряжение на зажимах, главным образом, потому что скорость открытия/закрытия клапана в системе управления ограничена до 0.1 о.е./с.
Литература
[1] IEEE Working Group on Prime Mover and Energy Supply Models for System Dynamic Performance Studies, “Hydraulic Turbine and Turbine Control Models for Dynamic Studies“, IEEE Transactions on Power Systems, vol. 7, no. 1, February 1992, pp. 167-179.
270