

Перевод справки пакета SimPowerSystems программы Matlab / powersysSmall
.pdfРисунок 2-30: 12-Pulse HVDC Control Block (12 - пульсная HVDC система управления) и его диалоговое окно для инверторного режима
Входы и выходы
Вход 1 (Vabc) — векторный сигнал, состоящий из трех фазных напряжений, первичной обмотки трансформатора со стороны преобразователя. Эти три напряжения используются, чтобы синхронизировать импульсы напряжения ЛЭП. Входы 2 и 3 - напряжение линии постоянного тока (VdL) и ток (Id). Обратите внимание на то, что измеренные постоянные токи (IdR иIdI в A) и напряжения ПОСТОЯННОГО ТОКА(VdLR и VdLI в В) переводятся в о.е. (1 о.е. тока = 2 кА; 1 о.е. напряжения = 500 кВ) прежде, чем они используются в регуляторах.
151
Входы 4 и 5 (Vd_ref иId_ref) - Vd иId - задание напряжения и тока в о.е. VdL и Id входы отфильтрованы перед подачей на регуляторы. Фильтр первого по-
рядка используется для входа Id, и фильтр второго порядка используется для входа VdL. Параметры фильтра показаны в диалоговом окне представленном на рисунке 2-30.
Вход 6 (Block) принимаетлогический сигнал (0-1) — использовать блок преобразователя, когда Block=1. Вход 7 также принимаетлогический сигнал, который используется для защиты. Если это сигнал, равен единице, угол включения будетравен значению, определенном в диалоговом окне блока.
Первые два выхода блока (PulseY и PulseD) содержатшесть векторных сигналов, которые подаются каждому из шести ключей преобразователя, которые соединяются с обмотками трансформатора, соединенных звездой и треугольником. Третий выход (alpha) - угол открывания, измеряемый в градусах, рассчитывающий с помощью сигнала, подаваемому с регулятора. Четвертый выход (Id_ref_lim) - фактическое значение задания тока (значение Id_ref, ограниченное функцией VDCOL как объясняется ниже).
Устройство синхронизации
Блок Discrete 12-Pulse HVDC Control block (дискретная 12 - пульсная
HVDC система управления), используетнапряжение первичной обмотки (вход 1) длясинхронизации и генерирования импульсов согласно заданию Vd_ref и Id_ref (входы 4 и 5). Напряжения синхронизации измеряются на стороне первичной обмотки трансформатора со стороны преобразователя, потому что там они меньше искажены. Пульсы на открытия ключей, синхронизированы с фундаментальной частотой AC source (источник переменного тока). При пересечении нуля коммутирующих напряжений (AB, BC, СА), пилообразный сигнал сбрасывается в ноль. Импульс на открытие ключа, генерируется всякий раз, когда значение пилообразного сигнала становится равным желаемому углу запаздывания, подаваемому с регулятора. Чтобы улучшить коммутирующие напряжения, используемые пульсирующим генератором, напряжение первичной обмотки (Vabc) отфильтрованы фильтром низкой добротности второго порядка, рассчитанного для фундаментальной частоты системы. Основная частота системы и диапазон рабочих частотфильтра определены в диалоговом окне блока.
Установившаяся V-I характеристика
Блок Discrete 12-Pulse HVDC Control (дискретная 12 - пульсная HVDC
система управления), отрабатываетхарактеристику для установившегося режима, показанную на рисунке 2-31.
152
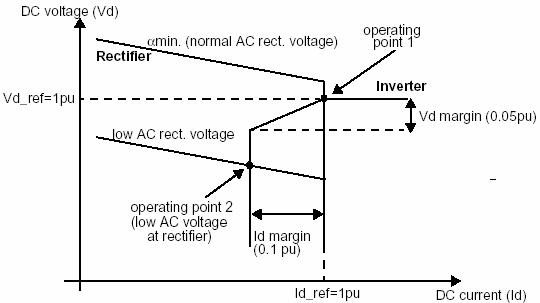
Рисунок 2-31: Характеристики установившегося режима для выпрямителя и инвертора и функция VDCOL
Внормальном режиме, выпрямитель управляеттоком по значению задания Id_ref, инвертор управляетнапряжением по значению задания Vd_ref.
Id_margin и Vd_margin параметры, определяемые в диалоговом окне инвертора. Они установлены соответственно в 0.1 о.е. и 0.05 о.е. Устройство обычно ра-
ботаетв точке 1 как показано на рисунке. Однако, при серьезных непредвиденных обстоятельствах, например, при падении напряжения в сети переменного тока 1, т.е. питании выпрямителя, рабочая точка перейдетв точку 2. Выпрямитель будет, поэтому работать по минимуму, а инвертор будетработать в режиме контроля тока.
Примечание. Виндустриальных регуляторах, угол инвертора α обычно ограничивается, на уровне минимального угла γ, где:
γ = угол отсечки = 180° – α – μ μ – коммутация или угол перекрытия
Угол управления γ требуется, чтобы избежать нарушений коммутации не предусмотренных в этой версии HVDC управления.
153
Функция VDCOL
Другая важная функция управления заключается в изменении тока задания в соответствие со значением напряжения DC voltage (источника постоянного напряжения). Этотуправление называется: «Ток, зависимый отнапряжения, порядка и ограничения» (VDCOL). Оно автоматически уменьшает ток задания (Id_ref), когда уменьшается VdL (например, в течение короткого
замыкания в линии постоянного тока или серьезного короткого замыкания переменного тока). Уменьшение тока задания Id также уменьшаетэлектропотребление реактивной мощности в сети переменного тока, помогая восстановиться после короткого замыкания. Диалоговое окно VDCOL параметров блока Discrete 12-Pulse HVDC Control block (дискретная 12 - пульсная
HVDC система управления) представлены на рисунке 2-32.
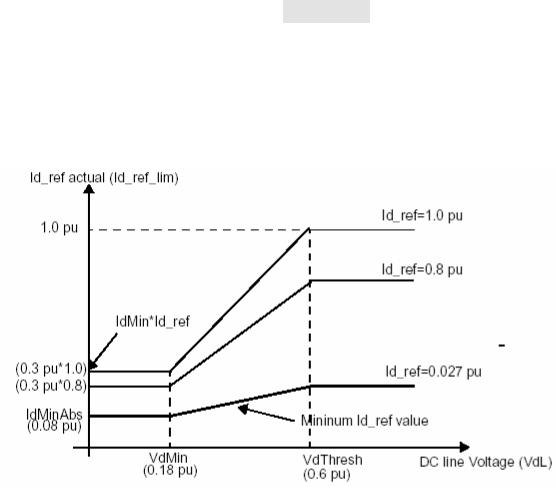
Рисунок 2-32: VDCOL характеристика; Id_ref = f (VdL)
Значение Id_ref начинаетуменьшаться, когда Vd напряжение ЛЭПпадает
ниже порогового значения VdThresh (0.6 о.е.). Фактический ток задания, используемый регуляторами доступен в четвертом выходе регулятора по имени
Id_ref_lim. IdMinAbs — абсолютный минимум Id_ref значение установленное в 0.08 о.е. Когда, при коротком замыкании, падение напряжения линии постоянного
тока опустится ниже значения VdThresh, VDCOL мгновенно уменьшитId_ref. Однако, когда напряжение DC voltage (источника постоянного напряжения)
восстановится, VDCOL ограничиваетвремя нарастания Id_ref с постоянной времени, определенной параметром Tup (80 мс в нашем примере).
154
Напряжение иток регулятора
Система управления выпрямителем и инвертором отслеживаютпараллельно и напряжение, и ток регулятора, вычисляя углы включения αv и αi. Эффективный угол — минимальное значение αv и αi. Этотугол доступен в третьем выходе блока по имени alpha (градусы). Оба регулятора — пропорционально и интегральные (ПИ). Они должны иметь достаточно высокое увеличение для низких частот(< 10 Гц), чтобы поддержать ток или напряжение на уровне тока задания (Id_ref_lim) или напряжения задания (Vd_ref), пока α находится в пределах (5 ° < α < 165 ° для выпрямителя, 92 ° < α < 165 ° для инвертора). Константы регуляторов Kp, и KI отрегулированы для маленьких возмущений задания тока. Используются следующие константы:
Регулятор тока: Kp=92°/о.е. Ki=4500°/о.е./s Регулятор напряжения: Kp=35°/о.е. Ki=2250°/о.е./s
Другая особенность регулятора — линеаризация пропорционального gain (увеличения). Поскольку напряжение Vd, произведенное выпрямителем и инвертором пропорционально cos(α), изменение DVd из-за изменения Da пропорционально sin(α). При постоянном значении Kp, эффективное gain (увеличение) было бы, поэтому, пропорционально sin(α). Чтобы постоянная gain (увеличения) была пропорциональна, независимо отзначения α, gain (увеличение) — линеаризируют, умножая постоянную Kp на 1/sin(α). Эта линеаризация применяется для диапазона определенного двумя пределами, указанными в диалоговом окне (третье поле).
Пуск системы и её установившейся режим
Обратите внимание на то, что устройство — дискретизировано и используетsample time (типовое время) Ts (Вы должны были уже определить Ts=50e-6 в вашем рабочем пространстве).
Устройство запрограммировано на пуск системы и достижения установившегося режима. Когда, ток задания скачкообразно увеличится, можно будетнаблюдать динамическую характеристику регуляторов.
Запустите моделирование, и наблюдайте сигналы инвертора и выпрямителя на графиках scopes (измерителя). Кривые представлены на рисунке 2-33.
155
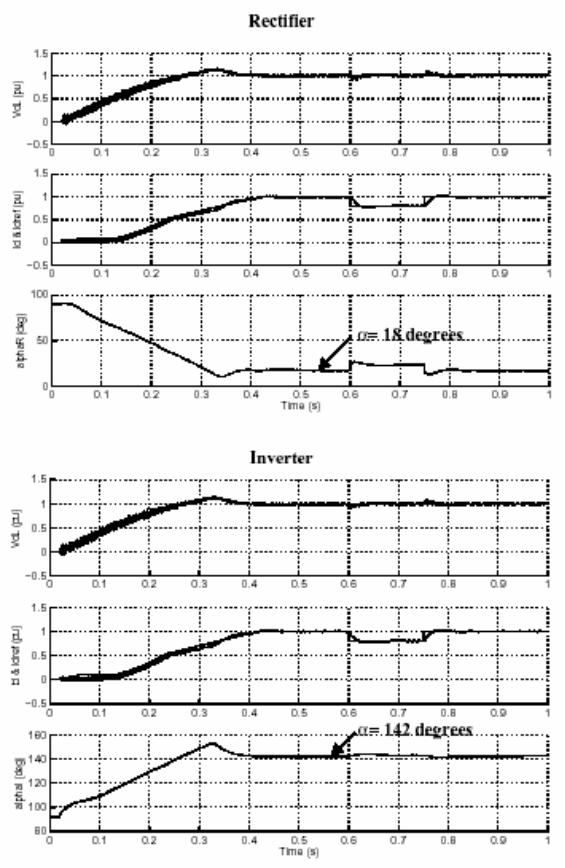
Рисунок 2-33: Пуск системы постоянного тока и скачкообразное увеличение тока задания
156

Ток задания линейно изменяется отноля до 1 о.е. (2 кА) за0.4 с. Обратите внимание на то, что постоянный ток начинаетрасти при t=20 мс, это то время, при котором регулятор и генераторы пульсаций разблокированы. Постоянный ток и напряжение стартуютиз нуля и выходятна установившийся режим приблизительно за 0.5 с. Выпрямитель управляеттоком, а инвертор — напряжением. График 1 обоих scopes (измерителей) и выпрямителя, и инвертора показываетнапряжение линии постоянного тока (1 о.е.=500 кВ). График 2 показывает ток задания и измеренный ток Id (1 о.е.=2 кА). Как только достигнутустановившейся режим, углы открытия вентилей α= 18° для преобразователя и α=142° для инвертора.
При t=0.6 с происходитскачок тока задания, чтобы выдержать динамическую характеристику регуляторов.
Уравнения магистральной линии, управляющие установившейся работой системы постоянного тока, даются здесь так, чтобы Вы могли проверить теоретические значения с результатами моделирования.
Следующее выражение содержитзависимость среднего прямого напряжения Vd 12 - пульсного моста отпостоянного тока Id и угла открывания α
Vd = 2 (Vdo cos(α)− RC Id )
где Vdo - идеальная прямая ненагруженная разность потенциалов для 6 - пульсного моста
Vdo = 3 π 2 VC
Vc - линейное действующее напряжение коммутации, которое зависитот напряжения системы переменного тока и коэффициента передачи трансформатора.
Rc - эквивалентсопротивления коммутации
RC = π3 XC
Xc - реактивное сопротивление коммутации, или реактивное сопротивление трансформатора, приведенное к стороне вентиля.
Следующие параметры выпрямителя использовались в моделировании.
Напряжение Vc зависитотэффективного значения напряжения на 500 кВшине и коэффициента трансформации трансформатора. Если Вы посмотрите на кривые, показанные на scope (измерителе) V_I_Rect, Вы увидите 0.96 о.е. Если Вы откроете диалоговое окно силового трансформатора, Вы увидите коэффициент трансформации — 0.91 который записан в поле значений для номинальных значений первичной обмотки. Поэтому, напряжение, прикла-
дываемое к инвертору, увеличилось на коэффициент1/0.91≈1.1, т.е. 10 %.
157

V |
= |
0.96 200 кВ |
|
= 213,3 кВ; |
|
|
|||
|
|
|
|||||||
C |
0,90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Id = 2 кА; |
|
|
|
|
|
|
|
||
α = 18°; |
|
|
|
|
|
|
|
||
XC = 0.24 о.е. рассчитанных для1200МВА и 222.2 кВ = 9.874 Ω |
|||||||||
Поэтому |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
2 |
|
|
||
|
|
Vdo |
|
|
|
|
|
= 287.9 |
кВ |
|
|
= |
|
|
π |
213.2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
R |
3 |
|
9.874 = 9.429 Ω |
|
|||
|
|
= |
π |
|
|
||||
|
|
C |
|
|
|
|
|
||
Vd = 2 (288.1 кВ cos(18°)− 9.429 2)= 510 кВ
Эта теоретическая разность потенциалов соответствуетразности потенциалов выпрямителя, рассчитанной из разности потенциалов инвертора и падения напряжения в линии постоянного тока.
Vd =VdLinverter + (RDCline + Rinductance ) Id
Vd = 500 кВ+ (4.5 Ω+1 Ω) 2 = 511 кВ
Также можетбыть рассчитан угол перекрытии — μ. Его теоретическое значение зависитотα, постоянного тока Id и реактивного сопротивления коммутации Xc.
|
X C Id 2 |
|
|
|
|
|
|
|
−α |
||||
μ = acos cos(α)− |
|
VC |
|
|||
|
|
|
|
|
|
|
|
|
9.874 2 |
|
2 |
|
|
|
|
|
|
−18°= 16.9° |
||
μ = acos cos(18°)− |
213.3 |
|
|
|
||
|
|
|
|
|
|
|
Теперь проверьте угол коммутации, с помощью построения токов двух вентилей, просматривая, например, спад тока в вентиле 1 и нарастание тока в вентиле 3, в одном шести - пульсном мосте выпрямителя.
Откройте подсистему выпрямителя. Откройте диалоговое окно верхнего моста и выберите All voltages and currents (все напряжения и токи) для списка Measurement (измерения). Теперь, скопируйте блок Multimeter (мультиметр) из библиотеки Measurements (измерений) в вашусхему case5.
Щелкните два раза на блоке Multimeter (мультиметр). Появится окно, в котором показаны все напряжения и токи моста. Выберите следующие сигналы:
uSw1: Rectifier/Universal Bridge
iSw1: Rectifier/Universal Bridge
iSw3: Rectifier/Universal Bridge
158

Число сигналов (3), появилось на изображении мультиметра. Используя блок Demux (демультиплексирование), выведите три выходных сигналов на scope (измеритель) с двумяграфиками. (График 1: uSw1 График 2: iSw1 и iSw3). Повторно перезапустите моделирование. Кривые, иллюстрирующие два периода, представлены на рисунке 2-34. Измеренный угол коммутации — 14 единиц 50 мс или 15.1° 60 Гц периода. Зная, что разрешающая способность 50 мс, временная единица равна 1.1°, этотугол, похож на теоретический.
Рисунок 2-34: Напряжение и токи вентилей (Коммутация с Вентиля 1 на Вентиль 3)
Ответ наскачок заданиятока
При t=0.6 с, происходитскачок на 0.2 о.е. тока задания (уменьшение от1 о.е. к 0.8 о.е.). При t=0.75 с, происходитдругой скачок, чтобы вернуть задание на 1 о.е. Посмотрите на регулятор тока. Он стабилизируется приблизительно за 0.1 с.
159
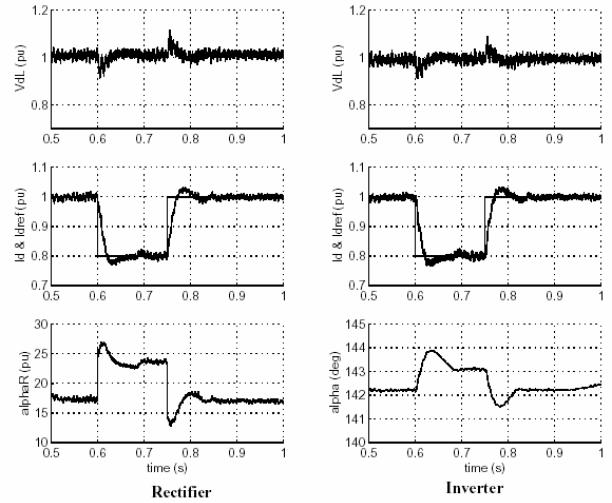
Рисунок 2-35: Ответна скачок задания тока на 0.2 о.е.
Короткое замыканиев линии постоянноготока
Отключите блок Step Up & Down (скачок вверх и вниз), чтобы устранить скачек, задания тока. Вблоках DC Fault Timer (таймер короткого замыкания постоянного тока) и Forced Delay (принудительная задержка) схемы psbhvdc12pulse, измените коэффициентумножения 100 на 1, так, чтобы короткое замыкание теперь происходило при t=0.6 с. Откройте scope (измеритель) I_DCfault , чтобы посмотреть ток короткого замыкания. Повторно запустите моделирование.
160