

Перевод справки пакета SimPowerSystems программы Matlab / powersysSmall
.pdfReference Frame (система отсчета): Определяетсистему отсчета, которая будетиспользоваться, чтобы преобразовать входные напряжения (abc система координат) в dq систему координати выходные токи (dq система координат) в abc систему координат. Смотри описание предыдущего диалогового окна для подробного описания.
Nominal: Номинальная активная мощность Pn (ВА), действующее линейное напряжение Vn (В), и частота fn (Гц).
Stator, Rotor, Mutual Inductance, Mechanical parameters: Тежесамые электрические и механические параметры как в диалоговом окне блокаS.I. единиц, выраженные в относительных единицах, кроме постоянной инерции H, которая выражена в секундах.
Initial conditions: Те жесамые начальные условия как в диалоговом окне блока S.I. единиц, за исключением того, что величины тока в относительных единицах.
Примечание. Этотблок моделирует ту же самую асинхронную машину; единственное отличие - различные единицы ввода.
Входы и выходы:
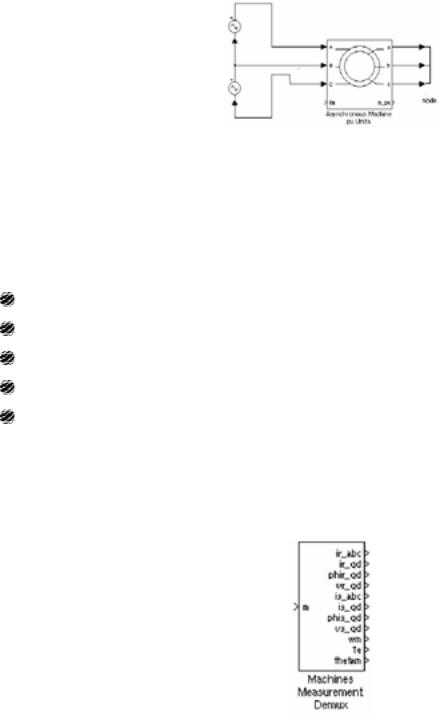
Электрические входы блока — три входа статора, электрические выходы
— три выхода ротора. Обратите внимание на то, что нейтральное соединение обмоток статора и ротора не доступно; принято соединение обмоток в звезду. Выходные терминалы ротора должны обычно быть короткозамкнутыми или связанными с внешней цепью, например, внешними резисторами или силовым преобразователем.
Вы должны быть осторожными, когда соединяете идеальные источники со статором машины. Если Вы хотите подвести электропитание статора через трехфазный соединенный в звезду бесконечный источник напряжения, Вы должны использовать три источника, связанные в звезду.
211
Однако если Вы захотите смоделировать соединение источников в треугольник, Вы должны использовать два источника, соединенных последовательно.
Simulink входблокамеханический вращающий моментна валу машины. Этотвход должен быть положительным в двигательном режиме и отрицательным в генераторном режиме.
Simulink выход блокавектор, содержащий 21 переменную. Они, представлены по порядку (см. выше «Описание», все токи, текущие в машине).
1-3: Токи ротора i'ra, i'rb и i'rc
4-9: i'qr, i'dr, θ'qr, θ'dr, v'qr и v'dr
10-12: Токи статора isa,, isb и isc
13-18: iqs, ids, φqs, φds, vqs и vds
19-21: ωm, Te и θm
Эти переменные могутбыть демультиплексированы, используя специальный блок Machines Measurement Demux (демультиплексирование измерений машин), который находится в библиотеке Machines (машины).
Ограничения:
Блок Asynchronous Machine (асинхронная машина) не учитываетвлияние насыщения железа статора и ротора.
212
Пример:
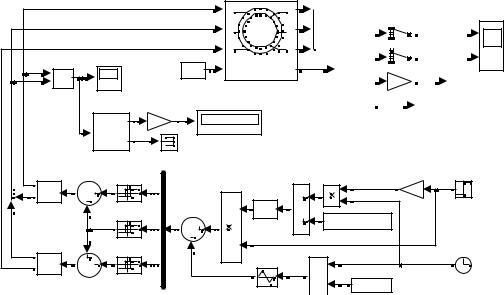
Этотпример иллюстрирует использование блока Asynchronous Machine (асинхронная машина) в двигательном режиме. Он состоитиз асинхронной машины и системы с не замкнутым контуром скорости. Ротор машины короткозамкнутый, а статор питается отPWM (ШИМ) инвертора, который построен с помощью Simulink блоков исоединяется с блоком Asynchronous Machine (асинхронная машина), через блок Controlled Voltage Source
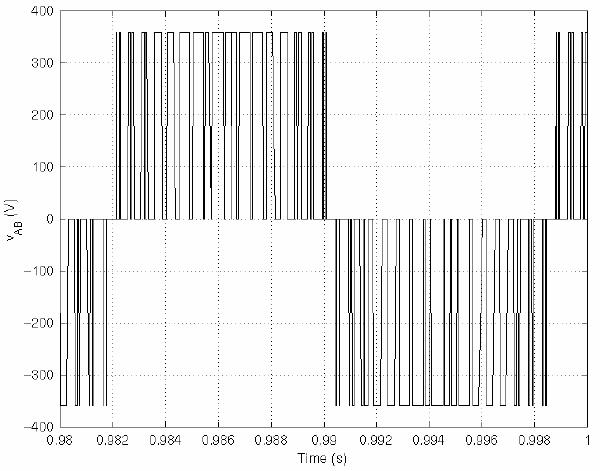
(управляемый источник напряжения). Инвертор используетсинусоидальную модуляцию, которая описана в [2]. Сигнал задания — синусоида с частотой 60 Гц, несущая частота — треугольная с частотой 1980 Гц. Это соответствует частотному коэффициенту модуляции mf=33 (60 Гц · 33 = 1980). В[2] рекомендуют, чтобы mf было нечетным, кратным трем и было настолько большим насколько возможно. Машина мощностью 3 л.с. соединена с постоянной номинальной нагрузкой (11.9 Н·м). Машина запускается и достигаетскорости в 1.0 о.е. при t=0.9 секунд. Параметры машины — те, которые определены в диалоговом окне SI Units (СИединиц), кроме индуктивности тока утечки статора, которая установлена вдвое больше ее нормального значения. Это сделано, чтобы смоделировать сглаживающий дроссель, помещенный между инвертором и машиной. Также, использовалась stationary (постоянная) система отсчета, чтобы получить результаты, показанные ниже.
3 HP - 22 0 V
60 Hz - 1 72 5 rp m
|
|
|
|
A |
a |
|
|
|
|
B |
b |
|
|
vab (V) |
|
C |
c |
va b |
|
|
|
||
|
11 .9 |
Tm |
m |
||
+ |
v |
|
|||
|
|
|
|
||
- |
|
|
|
|
|
|
|
|
pe ak2rms |
|
|
|
|
magnitude |
-K- |
0 |
|
|
|
|
|
||
|
|
signal |
RM S Vab vol ta ge |
|
|
|
|
angle |
|
||
Fo uri er
i r,i s (A)
ir_abc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ir_a (A) |
|||||||||
|
|
|
|
|
|||||||||
i s_abc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
is_a (A) |
|||||||||
m |
|
|
|
|
|||||||||
|
|
-K - |
|
|
|
|
|
|
|
|
|
|
|
wm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
rpm |
|
|
|
|
|
|
|
|
|
|
Te |
|
|
|
|
|
|
|
N (rpm ) |
|||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M ach i ne s |
|
Te (N.m) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
Mea su rem en t De mu x
|
Rel a yA |
|
|
|
pu 2ra dp e rsec |
+ |
|
|
|
|
|
|
|
|
|
-K- |
|
signal |
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
wm * Step |
Vab |
|
si n |
|
|
|
Rel a yB |
|
|
(p.u.) |
||
|
|
|
2* pi /3* [ 0 ,-1,1 ] |
||
|
|
m |
|
|
|
|
|
|
|
|
|
+ |
Rel a yC |
|
|
|
|
|
|
|
|
|
|
signal |
|
|
|
|
|
- |
|
|
re m |
|
|
Vbc |
|
|
|
Cl o ck |
|
|
|
|
1/1 98 0 |
||
|
|
|
|
|
D em ux |
L o ok-Up |
|
|
T ab l e |
M ath |
Fu ncti o n
Asynchronous machine fe d by PWM inverter |
|
|
? |
|
|
Do uble click on the Help b utto n (?) for details |
|
|
|
|
|
Mo re Info |
|||||
|
|||||
213
Откройте диаграмму Simulink, напечатав psbpwm или, выбрав Asynchronous Machine (асинхронная машина) в группе Demos (демонстрационные примеры) в библиотеке powerlib. Установите параметры моделирования следующим образом:
Integrator type (тип интегратора): Stiff (жесткий), ode15s
Stop time (время остановки моделирования): 1.0 s
Integration options (опции интегрирования): Используйте опции по умолчанию, кроме относительной погрешности, которая должна быть установлена в 1e-9. Это маленькая относительная погрешность требуется из-за высокойскорости коммутации инвертора
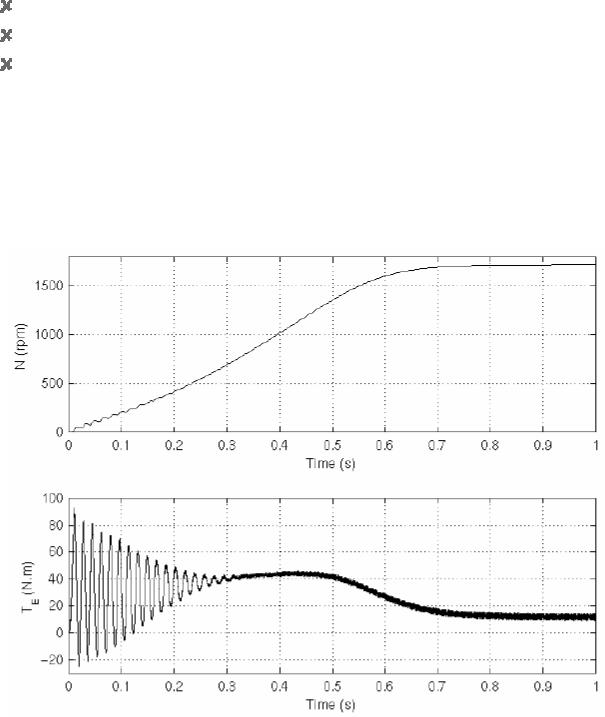
Запустите моделирование, выбрав Start (старт) в меню Simulation (моделирование). Как только моделирование закончится, можно посмотреть кривые скорости и момента машины.
214
Верхний график показываетскорость машины, увеличивающуюся от0 до 1725 оборотов в минуту (1.0 о.е.). Нижний график показываетэлектромагнитный момент, вырабатываемый машиной. Так как статор запитан отPWM (ШИМ) инвертора, наблюдаются высокочастотные пульсации момента.
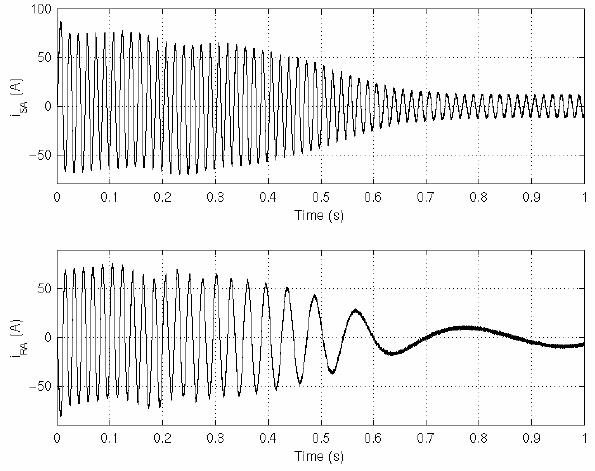
Однако, эти высокочастотные пульсации не видны на графике скорости, так как они фильтруются инерцией машины, но они заметны в токах статора и ротора, которые представлены ниже.
Наконец, посмотрите на выход PWM (ШИМ) инвертора. Так как в масштабе времени моделирования ни чего не видно, масштаб графика увеличен для последних моментов моделирования.
215
Литература
[1]Krause P.C., O. Wasynczuk, S.D. Sudhoff, Analysis of Electric Machinery, IEEE Press, 1995.
[2]Mohan N., T.M. Undeland, W.P. Robbins, Power Electronics: Converters, Applications, and Design, John Wiley & Sons, Inc., 1995, section 8.4.1.
216

Breaker (выключатель)
Назначение: Моделируетвыключатель, размыкающийся при прохождении тока через ноль.
Библиотека: Elements (элементы)
Описание: Блок Breaker (выключатель) моделируетвыключатель, где моментзамыкания и размыкания можетуправляться внешним Simulink сигналом (режим дистанционного управления), или внутренним таймером управления (внутренний режим контроля).
Процесс гашения дуги моделируется размыканием выключателя, когда ток проходитчерез ноль (первое прохождение тока через ноль после переключения входного Simulink сигнала управления от1 к 0).
Когда выключатель замкнут, он ведетсебя как резисторная схема. Он представлено сопротивлением Ron. Значение Ron можетбыть установлено небольшим, чтобы быть незначительным по сравнению с внешними компонентами (типичное значение – 10 мОм). Когдавыключатель разомкнут, он имеетбесконечное сопротивление.
Если блок Breaker (выключатель) установлен в режиме дистанционного управления, вход управления появляется в изображении блока. Сигнал управления соединенный со вторым входом, должен быть равен 0 или 1, 0, чтобы разомкнуть выключатель, 1, чтобы замкнуть его. Если блок Breaker (выключатель) установлен во внутреннем режиме управления, время переключения определяются в диалоговом окне блока.
Если начальное состояние выключателя равно 1 (замкнут), Power System Blockset автоматически инициализируетвсе состояния линейной схемы, а блок Breaker (выключатель) инициализируетначальный ток так, чтобы моделирование началось с установившегося режима.
Последовательная демпфирующая Rs-Cs схемавключена в модель. Она можетбыть опционально добавлена к выключателю.
217
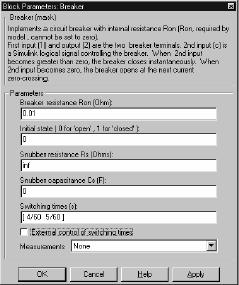
Диалоговое окно ипараметры:
Breaker resistance Ron: Внутреннее сопротивление выключателя, в Омах (Ом). Breaker resistance Ron (сопротивление выключателя Ron) не можетбыть установлено в ноль.
Initial state: Начальное состояние выключателя. Замкнутый контактпоказан в изображении блока, когда параметр Initial state (начальное состояние) равен 1, и разомкнутый контактпоказан, когда равен 0.
Snubber resistance Rs: Сопротивление демпфирующего устройства, в Омах (Ом). Установите параметр Snubber resistance Rs (сопротивление демпфирующего устройства) в inf (бесконечность), чтобы исключить демпфирующее устройство из модели.
Snubber capacitance Cs: Емкость демпфирующего устройства, в фарадах (Ф). Установите параметр Snubber capacitance Cs (емкость демпфирующего устройства Cs) в 0, чтобы исключить демпфирующее устройство, или на inf (бесконечность), чтобы получить чисто активное демпфирующее устройство.
218
Switching times: Определите вектор switching times (время переключения) при использовании блока Breaker (выключатель) во внутреннем режиме управления. Для каждого времени переключения блок Breaker (выключатель) разомкнется или замкнется в зависимости отего начального состояния. Например, если параметр Initial state (начальное состояние) равен 0 (замкнут), выключатель замкнется при первом времени переключения, разомкнется во втором времени переключения, и так далее. Параметр Switching times (время переключения) не виден в диалоговом окне, если установлен параметр External control of switching times (дистанционное управление временем переключения).
External control of switching times: Если установлен, добавляется вто-
рой вход к блоку Breaker (выключатель), для дистанционного управления временем переключения выключателя. Время переключения определяется Simulink сигналом (0 или 1), соединенным со вторым входом блока Breaker (выключатель).
Measurements: Выберите Branch voltage (напряжение ветви), чтобы измерить напряжение выключателя.
Выберите Branch current (ток ветви), чтобы измерить ток, текущий через выключатель. Если демпфирующего устройства соединено с моделью выключателя, измеренный ток — тот, который течетчерез контакты выключателя.
Выберите Branch voltage and current (напряжение и ток ветви), чтобы измерить напряжение и ток выключателя.
Поместите блок Multimeter (мультиметр), чтобы просмотреть выбранные кривые, получаемые в течение моделирования. Вполе Available Measurement (доступные измерения) блока Multimeter (мультиметр), будетпредставлены измерения, обозначенные, как показано в таблице ниже, сопровождаемые именем блока:
Измерение |
Метка |
Напряжение ветви |
Ub: |
Ток ветви |
Ib: |
Ограничения:
Блок Breaker (выключатель) смоделирован как источник тока, который управляетнапряжением, на его выводах. Когда блоксоединен последовательно с катушкой индуктивности или другим источником тока, Вы должны добавить схему демпфирующего устройства параллельно его выводов. В большинстве случаев Вы можете использовать чисто активное демпфирующее устройство (параметр Snubber capacitance (емкость демпфирующего
219
устройства) равно inf (бесконечность)) с большим значением сопротивления (параметр Snubber resistance (сопротивления демпфирующего устройства) равно 1e6, или около того).
Из-за ограничений моделирования внутренняя индуктивность выключателя Ron не можетбыть установлена в 0.
Вы должны использовать жесткий алгоритм интегрирования, чтобы моделировать схемы с блоком Breaker (выключатель). Ode23tb или Ode15s с параметрами по умолчанию обычно даютлучшую скорость моделирования.
Пример:
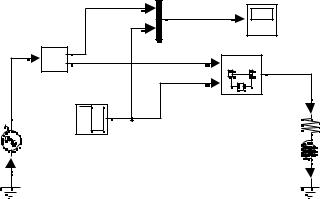
Выключатель соединенный последовательно с последовательной RL схемой и 60 Гц источником напряжения. Время переключения блока Breaker (выключатель) управляется Simulink, сигналом. Выключатель первоначально замкнут, размыкается он при t = 1.5 периода, когдаток достигаетмаксимума. Ток снова начинает течь в следующем прохождении сигнала через нуль, тогда выключатель повторно замыкается и напряжение проходитчерез нуль при t = 3 периода.
|
|
|
Iload & control |
|
i |
|
S cope |
+ |
|
1 |
|
- |
|
||
|
|
||
Iload |
|
2 |
|
|
c |
||
|
|
|
|
|
|
|
Breaker |
50V |
|
Breaker |
1 Ohm |
60 Hz |
|
0.1 H |
|
|
Control |
||
|
|
|
|
Эта схема доступна в файле psbbreaker.mdl. Моделирование даетследующие результаты.
220