Перевод справки пакета SimPowerSystems программы Matlab / powersysSmall
.pdfParallel RLC Load (параллельная RLC нагрузка)
Назначение: Моделируетпараллельную RLC нагрузку.
Библиотека: Elements (элементы)
Описание: Блок Parallel RLC Load (параллельная RLC нагрузка), моделируетлинейную нагрузку для комбинации RLC элементов соединенных параллельно. Для заданной частоты нагрузка покажетпостоянное полное сопротивление, и ее мощность будетпропорциональна квадрату прикладываемого напряжения.
Только элементы параметры, которых не равны нулю будутпоказаны на изображении блока.
Диалоговое окно ипараметры:
Nominal voltage Vn: Номинальное напряжение нагрузки, в Вольтах (действующее).
Nominal frequency fn: Номинальная частота, в Герц (Гц). Active power P: Активная мощность нагрузки, в ваттах.
Inductive reactive power QL: Индуктивная реактивная мощность QL, в ВАР. Вводите положительное значение, или ноль.
311
Capacitive reactive power QC: Емкостная реактивная мощность QС, в ВАР. Вводите положительное значение, или ноль.
Measurements: Выберите Branch voltage (напряжение ветви), чтобы измерить напряжение на выходе блока Parallel RLC Load (параллельная RLC нагрузка).
Выберите Branch current (ток ветви), чтобы измерить ток, текущий через блок Parallel RLC Load (параллельная RLC нагрузка).
Выберите Branch voltage and current (напряжение и ток ветви), чтобы измерить напряжение и ток блока Parallel RLC Load (параллельная RLC нагрузка).
Поместите блок Multimeter (мультиметр), чтобы просмотреть выбранные кривые, получаемые в течение моделирования. Вполе Available Measurement (доступные измерения) блока Multimeter (мультиметр), будетпредставлены измерения, обозначенные, как показано в таблице ниже, сопровождаемые именем блока:
Измерение |
Метка |
Напряжение ветви |
Ub: |
Ток ветви |
Ib: |
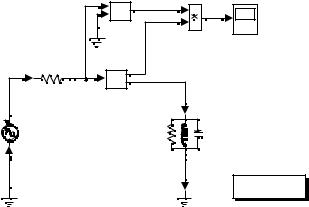
Пример:
Следующая схема используетблок Parallel RLC Load (параллельная RLC нагрузка), чтобы смоделировать нагрузку. Этотпример доступен в фай-
ле psbparalload.mdl.
|
+ |
v |
|
- |
|
|
u 1 |
|
|
+ |
i |
|
- |
|
|
|
|
2 Oh ms |
i 1 |
|
2 40 Vrms |
|
|
6 0 Hz |
200 W |
|
QL 400 Vars
QC 800 V ars @240 V 60 Hz
Prod uct
i nsta n ta n eo us po we r
Para l le l RLC L oa d
Pow erg ui -Co nti nu o us
См. также: Parallel RLC Branch, (параллельная RLC ветвь), Series RLC Load (последовательная RLC нагрузка), Series RLC Branch (последовательная RLC ветвь)
312

Permanent Magnet Synchronous Machine (синхроннаямашина спо-
стоянными магнитами)
Назначение: Моделируетдинамику трехфазной синхронной машины с постоянными магнитами с синусоидальным распределением потока.
Библиотека: Machines (машины)
Описание: Блок Permanent Magnet Synchronous Machine (синхронная машина с постоянными магнитами) работаетв генераторном или двигательном режиме. Режим работы определяется знаком механического вращающего момента (положительным для двигательного режима, отрицательным для генераторного режима). Электрическая и механическая часть машины представлена моделью state-space (режим-пространство) второго порядка.
Модель предполагает, что поток, выработанный постоянными магнитами в статоре, является синусоидальным, что подразумевает, что электродвижущие силы являются синусоидальными.
Блок моделируетследующие уравнения, выраженные в роторной системе отсчёта (dq координаты).
Электрическая часть
где (все переменные в роторной системе отсчета приведены к статору):  Lq, Ld: индуктивность осей q и d
Lq, Ld: индуктивность осей q и d
 R: сопротивление обмоток статора
R: сопротивление обмоток статора
 iq, id: токи осей q и d
iq, id: токи осей q и d
 vq, vd: напряжение осей q и d
vq, vd: напряжение осей q и d
 ωr: угловая скорость ротора
ωr: угловая скорость ротора
 λ: амплитуда потока, производимого постоянными магнитами ротора в фазах статора
λ: амплитуда потока, производимого постоянными магнитами ротора в фазах статора
 p: число пар полюсов
p: число пар полюсов
 Te: электромагнитный вращающий момент
Te: электромагнитный вращающий момент
313
Механическая часть
где:
J: суммарная инерция ротора и нагрузки
F: объединенное вязкое трение ротора и нагрузки q: угловое положение ротора
Tm : механический вращающий моментвала
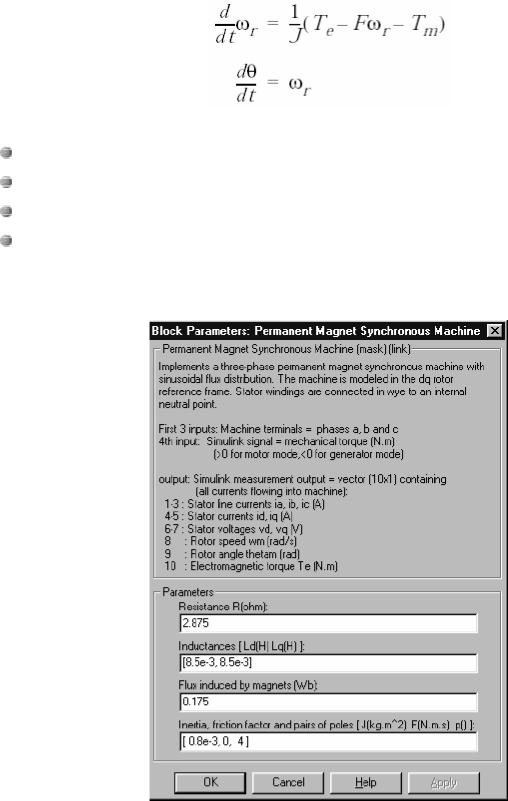
Диалоговое окно ипараметры:
Resistance: Сопротивление статора R (Ом).
314

Inductances: Индуктивность статора оси d и оси q – Ld и Lq (Гн).
Flux induced by magnets: Постоянный поток λ (Вб) индуцированный магнитами в обмотках статора.
Mechanical: Суммарная инерция машины и нагрузки J (кг·м2), суммарный коэффициентвязкого трения F (Н·м·с), и число пар полюсов p.
Входы и выходы:
Первые три входа – статорные обмотки машины, подключаемые к электросети. Четвертый вход – механический вращающий моментна вале машины (сигнал Simulink). Обычно на этотвход подается положительный сигнал,
потому что блок Permanent Magnet Synchronous Machine (синхронная ма-
шина с постоянными магнитами) обычно используется как двигатель. Однако Вы можете подавать отрицательный вращающий момент, если Вы хотите использовать блок в генераторном режиме.
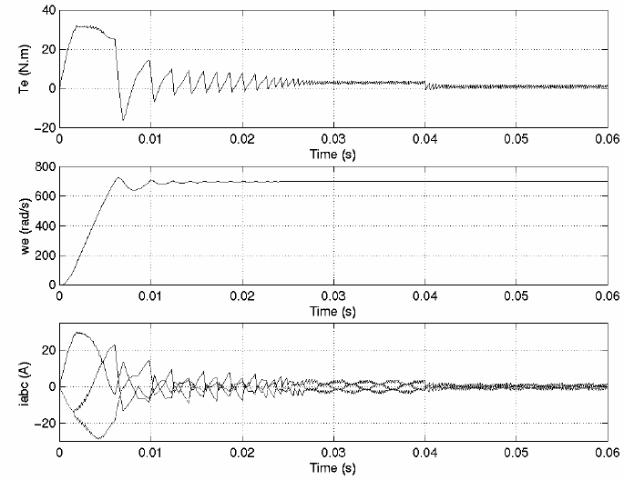
Выходы блока – вектор, содержащий следующие 10 переменных (все токи, текущие машине):



 1-3: линейные токи – ia, ib иic, в A
1-3: линейные токи – ia, ib иic, в A


 4-5: токи осей q и d – iq и id, в A
4-5: токи осей q и d – iq и id, в A



 6-7: напряжения осей q и d – vq и vd, в V
6-7: напряжения осей q и d – vq и vd, в V


 8: механическая скорость ротора ωr, в рад/с
8: механическая скорость ротора ωr, в рад/с



 9: механический угол ротора θ, в рад
9: механический угол ротора θ, в рад


 10: электромагнитный вращающий момент Te, в Н·м
10: электромагнитный вращающий момент Te, в Н·м
Эти переменные могутбыть демультиплексированы, используя специальный блок Machines Measurement Demux (демультиплексирование измерений машин), который находится в библиотеке Machines (машины).
Допущения:
Блок Permanent Magnet Synchronous Machine (синхронная машина с постоянными магнитами) не учитывает насыщение в железе ротора и статора, а используетлинейную магнитную цепь. Это насыщение можно не учи-
315