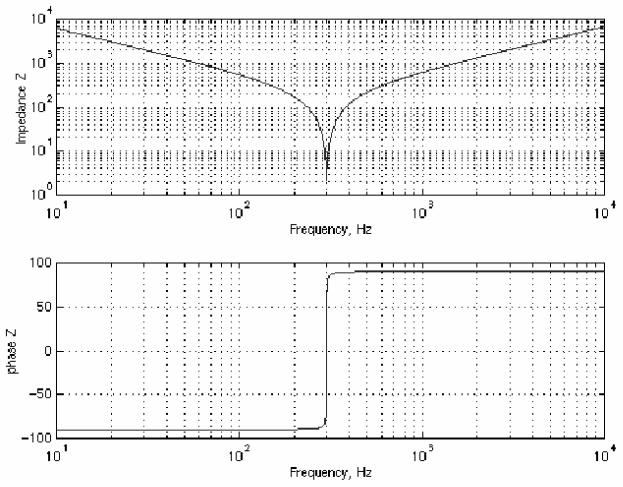
Эта система имеетодин вход (Vsource) и один выход (Current Measurement block). Если Вы имеете библиотеку Control System Toolbox (ком-
плектинструментов системы управления), Вы можете получить передаточную функцию Z(s) из матрицы state-space (режим-пространство) и bode (боде) функции.
[A,B,C,D] = power2sys(’psbseriesbranch’); freq = logspace(1,4,500);
w = 2·pi·freq; [Ymag,Yphase
] = bode(A,B,C,D,1,w); % invert Y(s) to get Z(s) Zmag = 1./Ymag; Zphase = -Yphase; subplot(2,1,1) loglog(freq,Zphase) grid
title(’5th harmonic filter’) xlabel('Frequency, Hz') ylabel('Impedance Zmag') subplot(2,1,2) semilogx(freq,Zphase) xlabel('Frequency, Hz') ylabel('phase Z')
grid
Вы также можете использовать блок Impedance Measurement (измеритель полного сопротивления) и powergui, чтобы построить график полного сопротивления в функции частоты. Чтобы измерить полное сопротивление, Вы должны отключить источник напряжения.
См. также: Series RLC Load (последовательная RLC нагрузка), Parallel RLC Branch (параллельная RLC ветвь), Parallel RLC Load (параллельная RLC нагрузка)
352
Series RLC Load (последовательная RLC нагрузка)
Назначение: Моделируетлинейную последовательную RLC нагрузку.
Библиотека: Elements (элементы)
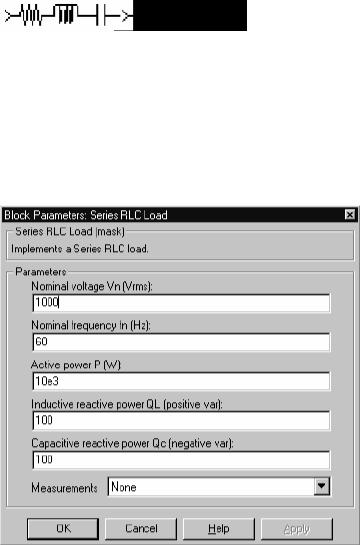
Описание: Блок Series RLC Load (последовательная RLC нагрузка), моделируетлинейную нагрузку как комбинацию RLC элементов соединенных последовательно. Для заданной частоты нагрузка покажетпостоянное полное сопротивление, и ее мощность будетпропорциональна квадрату прикладываемого напряжения. Только элементы параметры, которых не равны нулю будутпоказаны на изображении блока.
Диалоговое окно ипараметры:
Nominal voltage Vn: Номинальное напряжение нагрузки, в Вольтах (действующее).
Nominal frequency fn: Номинальная частота, в Герц (Гц). Active power P: Активная мощность нагрузки, в ваттах.
Inductive reactive power QL: Индуктивная реактивная мощность QL, в ВАР. Вводите положительное значение, или ноль.
Capacitive reactive power QC: Емкостная реактивная мощность QС, в ВАР. Вводите положительное значение, или ноль.
Measurements: Выберите Branch voltage (напряжение ветви), чтобы измерить напряжение на терминалах блока Series RLC Load (последовательная RLC нагрузка).
Выберите Branch current (ток ветви), чтобы измерить ток, текущий через блок Series RLC Load (последовательная RLC нагрузка).
Выберите Branch voltage and current (напряжение и ток ветви), чтобы измерить напряжение и ток блока Series RLC Load (последовательная RLC нагрузка).
Поместите блок Multimeter (мультиметр), чтобы просмотреть выбранные кривые, получаемые в течение моделирования. Вполе Available Measurement (доступные измерения) блока Multimeter (мультиметр), будетпредставлены измерения, обозначенные, как показано в таблице ниже, сопровождаемые именем блока:
Измерение |
Метка |
Напряжение ветви |
Ub: |
Ток ветви |
Ib: |
Пример:
Следующая схема используетблок Series RLC Load (последовательная RLC нагрузка), чтобы смоделировать простую нагрузку. Этотпример досту-
пен в файле psbseriesload.mdl.
|
+ |
v |
|
|
- |
|
|
|
u1 |
vol tage |
|
|
|
|
+ |
i |
|
|
- |
|
2 Ohms |
i1 |
|
current |
240V |
|
|
|
60Hz |
|
|
Series RLC Load |
|
p=2000W |
|
|
QL=400V ars |
|
|
QC=800 Vars |
Powergui |
|
@240v,60Hz |
-Conti nuous
См. также: Series RLC Branch (последовательная RLC ветвь), Parallel RLC Branch, (параллельная RLC ветвь), Parallel RLC Load (параллельная RLC нагрузка)

Simplified Synchronous Machine (упрощенная синхронная машина)
Назначение: Моделируетдинамику упрощенной трехфазной синхронной машины.
Библиотека: Machines (машины)
Описание: Блок Simplified Synchronous Machine (упрощенная син-
хронная машина) моделирует, и электрические и механические характеристики простой синхронной машины.
Электрическая система для каждой фазы состоитиз источника напряжения соединенного последовательно с RL сопротивлением, которое моделируетвнутреннее полное сопротивление машины. Значение R можетбыть нулевым, но значение L должно быть положительно.
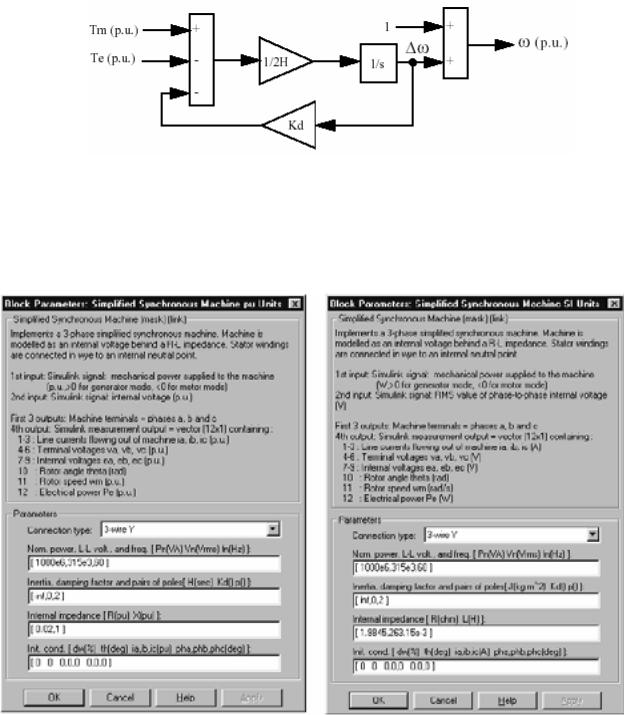
Блок Simplified Synchronous Machine (упрощенная синхронная машина) моделируетмеханическую часть, описанную уравнением
где:
Δω= отклонение скорости ротора отсинхронной H= моментинерции ротора
Tm= механический момент Te= электромагнитный момент
Kd= коэффициентдемпфирования ω(t)= механическая скорость ротора ω0= синхронная скорость (1 о.е.).
Хотя вводимые в диалоговом окне параметры могутизмеряться в единицах СИили в относительных единицах, внутренние вычисления ведутся в относительных единицах. Следующая блок-схема иллюстрирует, как осуществлена механическая часть модели. На структурной схеме хорошо видно, что в модели вычисляется отклонение скорости ротора отсинхронной, а не само значение скорости.
Диалоговое окно ипараметры:
Вбиблиотеке powerlib Вы можете выбирать между двумя блоками Simplified Synchronous Machine (упрощенная синхронная машина), определяя электрические и механические параметры модели.
Диалоговое окно для относитель- |
Диалоговое окно для СИ единиц. |
ных единиц (о.е). |
|
Connection type: Определяетчисло проводов, используемых при подключении в трехфазное соединение звезда: или трехпроводной (нейтральный не доступный) или четырехпроводной (нейтральный доступен).
356

Nominal: Номинальная мощность Pn (ВA), частота fn (Гц), и действующее линейное напряжение Vn (В). Используются для вычисления номинального вращающего момента и преобразования СИединиц в о.е.
Mechanical: Моментинерции (Н·м или о.е.) и коэффициентдемпфирования. Коэффициентдемпфирования масштабируется, чтобы действовать подобно коэффициенту демпфирования второго порядка. Это значит, например, что коэффициентдемпфирования 0.9 не даетперерегулирование, и время регулирования будетминимально.
Internal impedance: Сопротивление R (Ом или о.е.) и реактивное сопротивление L (Гн или о.е.) длякаждой фазы.
Initial conditions: Начальное отклонение скорости ротора отсинхронной (в процентах отноминала), угловоеположение ротора (град.), начальные значения токов статора (Аили о.е.) и начальные фазы токов статора (град.). Эти значения можно вычислить с помощью утилиты load flow (потокораспределение) блока Powergui.
Примечание. Эти два блока моделируютодну и ту же упрощенную синхронную машину; единственное отличие – вводимые единицы измерения.
Входы и выходы:
Первый ввод блока Simplified Synchronous Machine (упрощенная синхронная машина) – механическая мощность на валу машины. Этотвход можетбыть константой или выходом блока Hydraulic Turbine and Governor (гидравлическая турбина и регулятор). Частота источников напряжения зависитотмеханической скорости машины. Амплитуда этих напряжений подается на второй вход блока, который можетбыть константой или выходом регулятора напряжения. Если Вы используете единицы СИ, эти два входа должны быть в ваттах и девствующих линейных вольтах. Если Вы используете о.е., оба входа должны быть в о.е.
Первые три выхода – электрические выводы статорной обмотки машины. Последний выход блока – вектор, содержащий следующий 12 переменных:
1-3: Линейные токи (вытекающие из машины) ia, ib, ic
4-6: Напряжение на терминалах va, vb, vc 7-9: Внутренние напряжения ea, eb, ec
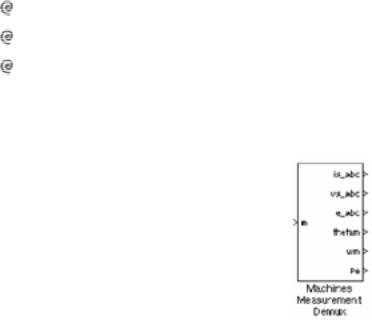
10: Механическое угловоеположение θ
11: Скорость ротора ω
12: Электрическая мощность Pe
Эти переменные могутбыть демультиплексированы, используя специальный блок Machines Measurement Demux (демультиплексирование измерений машин), который находится в библиотеке Machines (машины).
Допущения:
Электрическая система блока Simplified Synchronous Machine (упрощенная синхронная машина) состоитисключительно из источника напряжения и синхронного реактивного и активного сопротивления. Все остальное, в том числе индуктивность намагничивания якоря, обмотка возбуждения и демпферная обмотка не учитывается. Три источника напряжения, RL сопротивление соединенные в звезду (3 провода). Нагрузка можетбыть симметричной, а можети не быть.
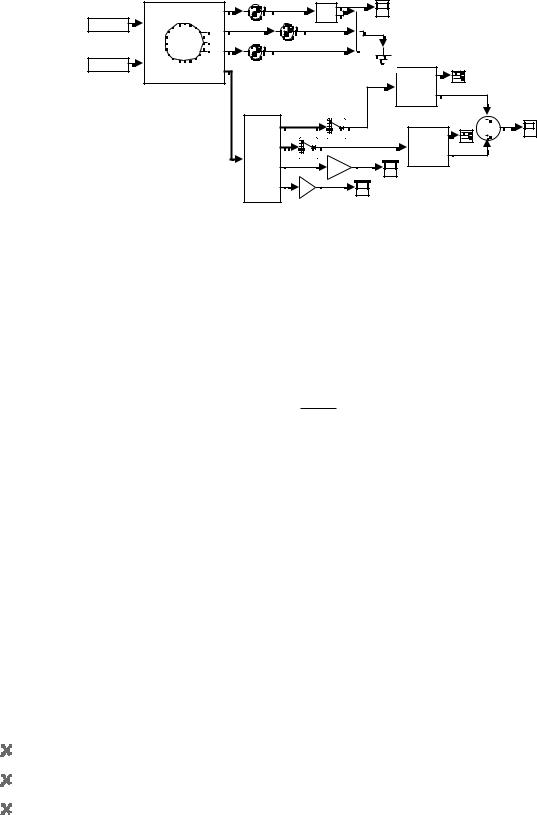
Пример:
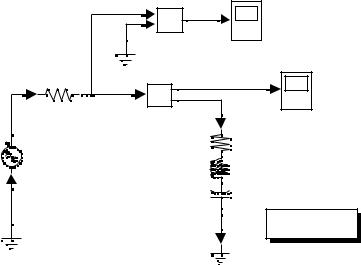
Следующий пример иллюстрируетприменение блока Simplified Synchronous Machine (упрощенная синхронная машина). Вэтом примере, блок Simplified Synchronous Machine (упрощенная синхронная машина), который представляет1000 МВА315 кВэквивалентный источник, соединен с бесконечной шиной (три блока AC Voltage Source (источник переменного напряжения)) и используется как синхронный генератор. Внутреннее сопротивление машины установлено в 0.02 о.е., или 1.9845 Ом. Его индуктивность установлена таким способом, что общее количество реактивного сопротивления равно 1 о.е. (L=263.15 мГн). Инерция машины – 56290 кг·м2. Этотпример доступен в файле psbsimplealt.mdl.
|
A |
|
+ |
i |
|
|
|
|
- |
|
|
5 05 e6 |
Pm |
va |
ia |
Ia (A) |
|
Pm |
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
vb |
|
|
|
|
|
|
|
|
|
|
3 15 e3 |
E |
vc |
|
|
|
|
VLL rms |
m_SI |
|
|
magnitude |
|
|
|
|
|
|
|
|
|
|
|
1 00 0 M VA - 3 15 kV |
|
|
|
si gnal |
|
|
6 0 Hz - 18 00 rpm |
|
|
|
angle |
|
|
|
|
|
|
|
|
|
|
|
|
p h i_ Va |
|
|
|
v s_abc |
|
|
magnitude |
|
|
|
|
|
|
power angle |
|
|
e_abc |
|
|
si gnal |
|
|
|
|
delta (deg) |
|
|
m |
|
|
angle |
|
|
|
|
|
|
|
|
-K- |
|
|
|
|
wm |
|
p hi _ ea |
|
|
|
|
|
|
|
|
|
Pe |
-K - |
n |
(rp m) |
|
|
|
|
|
|
|
|
Ma chi n es |
|
Pe (M W) |
|
|
|
|
|
|
|
|
|
|
Me asure me nt |
|
|
|
|
|
|
D em ux |
|
|
|
|
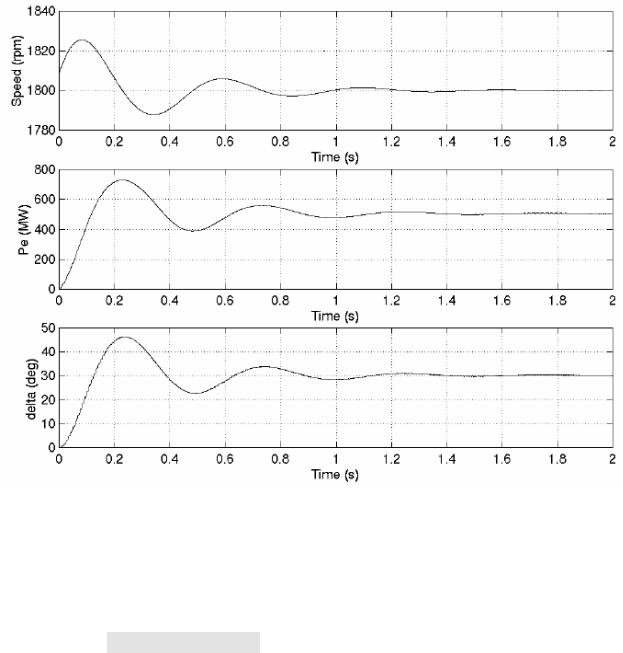
Вэтом примере, машина имеетначальное отклонение скорости 0.5 %. Начальный механический угол и фазы токов ia, ib и ic установлены в ноль. Передача мощности между машиной и шиной дается следующим отношением:
PT = V1XV2 sin(δ)
PT = передача мощности (500 МВт)
V1 = напряжение машины (315 кВ)
V2 = напряжение шины (315 кВ)
X = общее количество реактивного сопротивления (263.15 мГн·120·π) δ = электрическое угловоеразличие (угол мощности δ) между внутрен-
ним напряжением машины и напряжением на терминалах
С вышеупомянутыми параметрами, установившееся внутреннее напряжение опережаетнапряжение на терминалах на 30 градусов (δ= +30°). Машина снабжается 505 мВтмеханической мощности, чтобы компенсировать ее активные потери. Электрический угол δ отображен как различие фазы между внутренним напряжением и напряжением фазы A. С параметрами, представленными ниже, моделирование показало следующие результаты:
Integrator type (тип интегратора): Stiff (жесткий), ode15s
Stop time (время остановки моделирования): 2.0 s
Integration options (опции интегрирования): Используйте опции по умолчанию
359
График скорости в функции времени ясно показывает, что машина первоначально имеетскорость 1.005 о.е. (1809 оборотов в минуту) и что она стабилизируется на номинальном значении 1800 оборотов в минуту. Как ожидалось, электрическая мощность, снабжаемая машиной, стабилизируется на 500 МВт. Угол мощности δ также стабилизируется на значении 30°. Механическаясистема ясно подзаглушена, коэффициентдемпфирования установлен на
0.3.
См. также: Excitation System (устройство возбуждения), Hydraulic Turbine and Governor (гидравлическая турбина и регулятор), Powergui,
Steam Turbine and Governor (паровая турбина и регулятор), Synchronous Machine (синхронная машина)
360