

Перевод справки пакета SimPowerSystems программы Matlab / powersysSmall
.pdfSteam Turbine and Governor (пароваятурбина и регулятор)
Назначение: Моделируетдинамику системы управления скоростью, паровой турбины, и мультимассового вала.
Библиотека: Machines (машины)
Описание: Блок Steam Turbine and Governor (паровая турбина и регулятор) моделируетзаконченную систему, состоящую из парового двигателя, системы управления скоростью, паровой гидротурбины с четырьмя ступенями, и вала четырех масс.
Система управления скоростью, состоитиз пропорционального регулятора, реле скорости и сервомотора, управляющего открытием заслонки. Она подобна одной из моделей, предложенных в [1].
Паровая турбина имеетчетыре стадии, каждая смоделирована апериодическим звеном. Первая стадия представляетпаровую камеру, в то время как три других стадии представляютили конвейерный трубопровод или на-
361
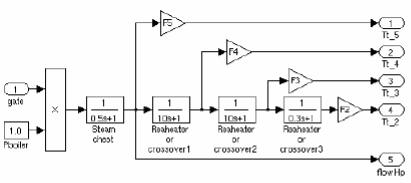
греватели. Котел не смоделирован, и его давление постоянное 1.0 о.е. Фракции F2 – F5 используются, чтобы распределить газотурбинную мощность на различные стадии вала.
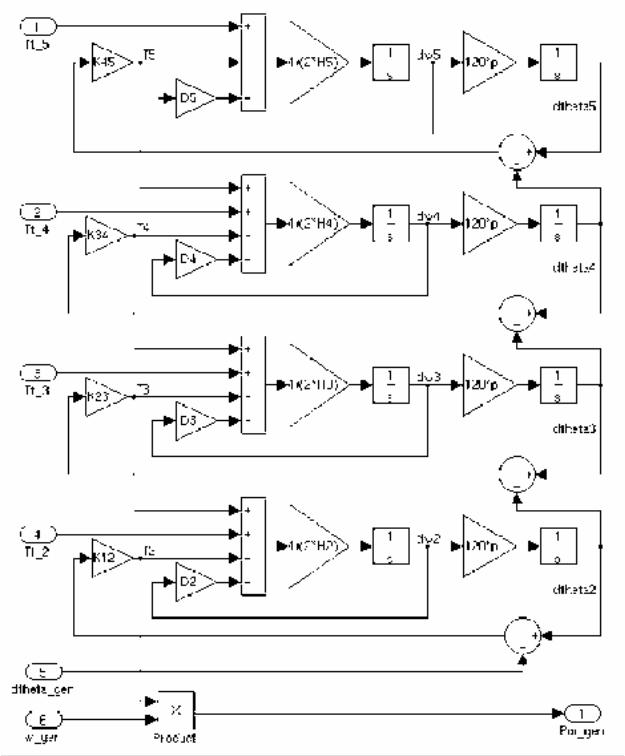
Вал смоделирован четырех массовой системой, которая соединена с массойв модели синхронной машины для общего количества: пяти масс. Масса машины помечена как mass #1 (масса#1). Массав блокеSteam Turbine and Governor (паровая турбина и регулятор), который является самым близким к массемашины – mass #2 (масса #2), в то время как масса, самая дальняя отмашины – mass #5 (масса #5). Вал характеризуется массой инерции H, демпфирующим коэффициентом D и коэффициентом жесткости K. Если Вы выбираете модель одно массового вала, полная четырех массовая подсистема вала в блокеSteam Turbine and Governor (паровая турбина и регулятор) будетзаблокирована, и весь вращающий моментот турбины будетсуммирован и применен к массемашины.
362
363

Диалоговое окно ипараметры:
 Выберите или одно массовый или мультимассовый вал.
Выберите или одно массовый или мультимассовый вал.
Параметрами системы управления скоростью.
Параметры паровой турбины. Фракция вращающего момента должна быть одна.
Параметры мультимассовые вала. Они не будут видимы, если Вы выбираете одно массовый вал. Введите нуль для инерции (H), если масса не должна моделироваться.
Если Вы выбираете одно массовый вал, требуется только начальная мощность.
Generator type: Определяеттип ротора: одно массовый или мультимассовый. Если Вы выберите одно массовуюсистему, мультимассовая подсистема вала в блоке Steam Turbine and Governor (паровая турбина и регулятор) заблокируется, и на выход турбины пойдетсуммарный вращающий момент, который применится к одной массев блоке Synchronous Machine (синхронная машина).
Regulator: Постоянная Kp, постоянная спада Rp (о.е), иширина мертвой зоны Dz (о.е). Установите gain (постоянную) в три, если Вы хотите использовать обратную связь по паровому потоку. Иначе, установите gain (постоянную), в единицу.
364
Time constants: Релескорости и постоянные времени серводвигателя заслонки Tsr (с) и Tsm (с).
Gate Limits: Минимальная и максимальная скорость открытие заслонки vgmin и vgmax (обев о.е. /с), и минимальное и максимальное открытие заслонки gmin и gmax (оба в о.е.).
Turbine time constants: Постоянные времени турбины T2 – T5 (с). Пронумерованы последовательно относительно фракций вращающего момента турбины и массовыми номерами, то есть, T5 – постоянная времени первой ступени турбины, которая моделируетпаровую камеру.
Turbine torque fractions: Фракции вращающего момента турбины F2 – F5. Всумме должен равняться единице, иначе будетпоявляться сообщение об ошибке. Номера фракции соответствуютмассовым номерам, то есть, фракцию вращающего момента – F2 нужно применить к mass #2 (массе #2) мультимассового вала.
Multi-mass shaft: Видим, если тип генератора – мультимассовый. Коэффициенты инерции H2 – H5 (с), коэффициенты жесткости K12 – K45 (о.е./рад), декрементзатухания D2 – D5 (о.е. вращающий момент/о.е. отклонение скорости) связанные с массами мультимассового вала. K12 соответствуеткоэффициенту прочности между массами 1 и 2, и так далее.
Примечание. Если Вы не хотите моделировать все четыре массы в мультимассовом вале, просто установите инерцию нежелательных масс в ноль. Коэффициентпрочности и декрементзатухания, соответствующие не нужным массам не рассматриваются. Когда массыне моделируются, оставшаяся система «сжимается» к генератору, то есть, если только 2 массы используются (исключая генератор), это будетмасса #2 и #3. Входные данные для рассматриваемых масссмещаются соответственно. Влюбом случае, инерция должна быть совместима с фракциями вращающего момента. Вы не можете устанавливать инерцию в ноль при этом устанавливать соответствующую фракцию вращающего момента в значение отличное отнуля. Однако Вы можете устанавливать фракцию вращающего момента в ноль при этом устанавливать соответствующую массовую инерцию на значение отличное отнуля.
365
Initial conditions: Есливал — мультимассовый, имеется начальная механическая мощность – Pm0 (о.е.) и начальный угол генератора – qe0 (град.). Если одно массовый вал, имеется только начальная механическая мощность.
Начальная механическая мощность, можетбыть вычислена утилитой load flow (потокораспределение) блока Powergui. Начальный угол также можно вычислить утилитой load flow (потокораспределение) и передать в диалоговое окно связанной синхронной машины.
Входы и выходы:
Первый вход – задание скорости, в о.е. Обычно онсоединен с блоком Constant (постоянная) и его значение установлено в 1.0 о.е.
Второй вход – задание электрической мощности, в о.е. Обычно на него подается постоянное значение, соответствующее начальной активной мощности, из блока Synchronous Machine (синхронная машина), соединенной с блоком Steam Turbine and Governor (паровая турбина и регулятор).
Третий вход – скорость генератора, в о.е. Это – один из сигналов из выходного вектора модели синхронной машины (внутренние переменные).
Четвертый вход – отклонение угла выбега ротора генератора. Это – один из сигналов из выходного вектора модели синхронной машины (внутренние переменные).
Первый выход – вектор, содержащий отклонения скорости, в о.е., массы отпятой ко второй.
Второй выход – также вектор, содержащий вращающие моменты, в о.е., посланные отпятой ко второй массы.
Третий выход - механическая мощность, в о.е., который Вы должны соединить с первым входом блокаSynchronous Machine (синхронная машина).
Пример:
Этотпример, доступный в файле psbthermal.mdl, иллюстрируетиспользование блока Steam Turbine and Governor (паровая турбина и регулятор). Это устройство — IEEE эталонный тест, по которому обычно изучают подсинхронный резонанс и усиление вращающего момента после короткого замыкания в последовательно-компенсирующей энергосистеме [2]. Оно состоитиз одного генератора, соединенного с шиной бесконечной мощности через две линии электропередач, одна из которых последовательно компенсирована. Подсинхронный режим, представленный корректирующим конденсатором, после короткого замыкания происходити уходит, возбуждая колебательные крутильные колебания мультимассового вала, и можетнаблюдаться явление усиления вращающего момента. Откройте диаграмму simulink, напечатав psbthermal.
Это устройство слегка отличается оттого, что представлено в [2]. Так как мы используем массу синхронной машины в качестве первой массы, мы не можем моделировать массу возбудителя, как сделано в [2]. Поэтому, наше
366

устройство имеет только три массы, представляя ротор генератора (mass #1 (масса #1)), и низкие и высокиеступени давления турбины (mass #2 и #3 (массы #2 и #3, соответственно)).
|
|
|
In |
Scope : turb in e |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
0 |
t |
|
|
1 |
wref dw_5-2 |
In |
|
|
|
|
|
|
|
|||
|
|
|
|
|
Cl ock |
|
|
|
||||
-C- |
P ref |
Tr5-2 |
In |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Pre f |
wm |
gate |
2 |
|
|
|
|
|
|
|
|
|
In |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
d_theta P m |
|
Pm |
A |
A |
a |
A |
a |
A |
A |
A |
|
|
|
B |
B |
b |
B |
b |
B |
B |
B |
|||
|
|
|
|
|
||||||||
|
STG |
|
|
C |
C |
c |
C |
c |
C |
C |
C |
|
|
|
|
|
Vf |
||||||||
|
|
1 |
|
m_pu |
voltmeters |
600MVA-6 0 Hz |
Z1-Z0 |
Cs 55% |
Ind ucti ve so urce |
|||
|
|
Vf |
|
|
|
|||||||
|
|
|
600 MVA-22kV |
|
|
2 2 kV-500 kV |
|
|
wi th ne utral |
|||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
60 Hz-360 0rp m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
A |
A |
|
|
|
|
|
d_theta |
|
|
ctrl |
B |
B |
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
wm |
m |
Time r |
|
C |
C |
C |
|
|
|
|
|
Pe |
Pe |
|
|
|
|
Z1-Z0 |
|
|
|
|
|
|
|
|
|
Fau lt |
|
|
||||
|
|
|
|
dw |
|
|
|
|
|
|||
|
|
|
|
|
|
|
Breake r |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Machi nes |
|
|
|
|
|
|
|
|
|
|
|
|
Measuremen t |
|
|
|
|
|
|
|
|
|
|
|
|
Demux |
|
|
|
Tor que amplification study: |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Powergui |
|
|
IEEE second benchmar k on subsynchr onous r esonance |
? |
||||||
|
|
-Continuous |
|
|
|
|
Double click on the Help button (?) for details |
More Info |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Чтобы начинаться, моделирование для установившегося режима, на устройстве было выполнено load flow (потокораспределение), с установкой генератора как PV generator (PV генератор) с начальной мощностью 100 кВт (1e5 Вт). Это сделано, чтобы моделировать первоначально разгруженный генератор. Load flow (потокораспределение) возвращаетначальную механическую мощность 100 010 Вт. Это значение было преобразовано в о.е., деля его на номинальное значение В·Агенератора (600e6 В·А) и в результате было введено первое начальное состояние в блок Steam Turbine and Governor (паровая турбина и регулятор). Второе начальное значение – начальный угол генератора. Это значение вычислено load flow (потокораспределением) и записано в вектор начальных условий генератора. После того, как потокораспределение закончится, Вы можете открыть диалоговое окно блока Synchronous Machine (синхронная машина) и скопировать начальный угол в диалоговое окно блокаSteam Turbine and Governor (паровая турбина и регулятор). Блок Steam Turbine and Governor (паровая турбина и регулятор) – теперь правильно инициализированы. Задание электрической мощности (нагрузка), второй вход блокаSteam Turbine and Governor (паровая турбина и регулятор), установлена на желаемую электрическую мощность, подводя электропитание генератора, в о.е. (1e5/600e6, или 0.1/600).
367

Этот тествыполнен без регуляторов. Система управления скоростью принудительно выдаетна выход постоянное значение с помощью настройки пределов открытия заслонки очень близко друг к другу, около начального открытия заслонки, которое является также начальной механической мощностью в о.е. (100 010/600e6, или 0.00016668 о.е.). Напряжение возбуждения машины также установлено на постоянное значение (1.00358 о.е.), которое вычислено load flow (потокораспределением).
Установите параметры моделирования следующим образом:
Integrator type (тип интегратора): Variable-step (переменный шаг), ode23tb
Stop time (время остановки моделирования): 0.5 s
Integration options (опции интегрирования): Используйте опции по умолчанию, кроме Max step size (размера максимального шага), который Вы установите в 50e-6. Это абсолютно не требуется, но моделирование выполняется быстрее, если это значение установлено, как предписано.
Запустите моделирование, выбрав Start (пуск) в меню Simulation (моделирование). Как только моделирование закончится, посмотрите массовые отклонения скорости, вращающие моменты и ток короткого замыкания.
368
Максимальные значения всех этих сигналов соответствуютв пределах 3 % значений представленных в Таблице 5, случай 1A, [2]. Увеличение момента наблюдается на всех массах системы вала. Высокое давление mass (#3)
(масса #3) передаетмаксимальный момент1.91 о.е. к mass (#2) (массе #2) низкого давления, в то время как масса низкого давления передаетмаксимальный момент4.05 о.е. к ротору генератора mass (#1) (масса#1).
Литература
[1]IEEE committee report, “Dynamic models for steam and hydro turbines in power system studies”, IEEE Transactions on Power Apparatus and Systems, vol. PAS-92, no. 6, 1973, pp. 1904-1915.
[2]IEEE Subsynchronous resonance working group, “Second benchmark model for computer simulation of subsynchronous resonance”, IEEE Transactions on Power Apparatus and Systems, vol. PAS-104, no. 5, 1985, pp. 1057-1066.
См. также: Excitation System (устройство возбуждения), Hydraulic Turbine and Governor (гидравлическая турбина и регулятор), Powergui,
Synchronous Machine (синхронная машина)
369
Surge Arrester (разрядник для защиты от перенапряжений)
Назначение: Моделируетметаллически-окисный разрядник для защиты отперенапряжений.
Библиотека: Elements (элементы)
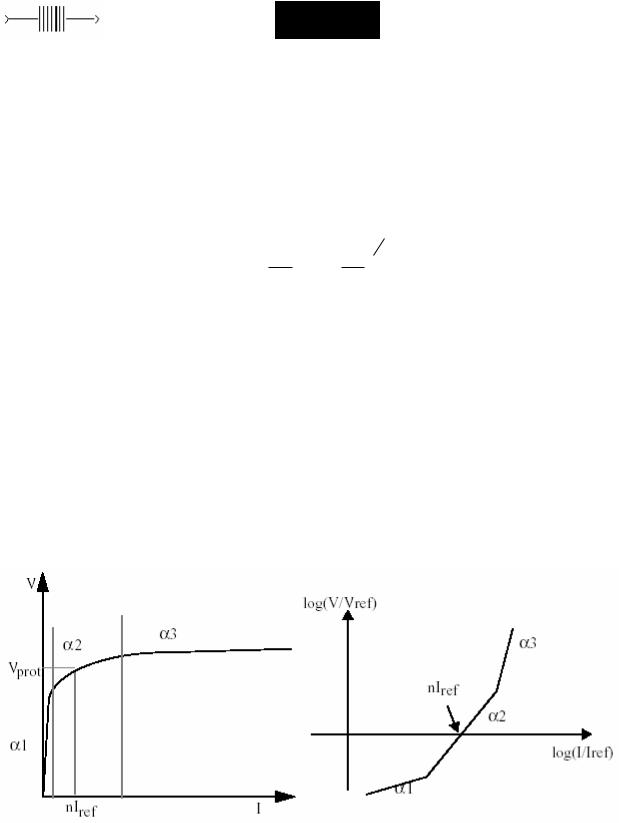
Описание: Блок Surge arrester (разрядник для защиты отперенапряжений) моделируетнелинейный резистор, используемый для защиты силового оборудования отбросков напряжения. Для приложений, требующих разложение мощности рассеяние, несколько столбцов металлически-окисных дисков соединены параллельной внутренней частью, с одинаковым размещением фарфора. Нелинейная V-I характеристика каждого столбца разрядника смоделирована комбинацией трех показательных функций:
V |
= K |
|
|
I |
1ai |
V |
|
I |
|
|
|
i |
|
|
|
||
ref |
|
|
|
ref |
|
Напряжение защиты, полученное единственным столбцом, определено заданием тока (обычно 500 A или 1 кА). Заданные по умолчанию параметры k и α задаются в диалоговом окне исоответствуютсреднему числу V-I характеристики, обеспеченные основной окисью металла изготовителями разрядника, и они не изменяются с напряжением защиты. Требуемое напряжение защиты получается добавлением дисков цинковой окиси последовательно для каждого столбца.
Эта V-I характеристика графически представлена следующим образом (в линейном масштабе и в логарифмическом масштабе).
370