

Перевод справки пакета SimPowerSystems программы Matlab / powersysSmall
.pdfearization (частичной линеаризованностью), и мы должны гарантировать, что остающаяся динамика асимптотически устойчива. Полное освещение этого вопроса можетбыть найдено в [1].
Результаты моделирования
Работа нелинейного регулятора проверена на нелинейном устройстве гидротурбины-генератора. Регулятор и гидротурбина смоделированы, с помощью блоков Simulink, в то время как генератор представлен блоком Synchronous Machine (синхронная машина) библиотеки powerlib. Трехфазное короткое замыкание моделируется на шине нагрузки, на 100 мс. Проанализирована работа нелинейного регулятора.
Показательный пример представлен в файле psbregulator.mdl. Система показана ниже, на рисунке 2-18 . Перед стартом моделирования, удостоверитесь, что параметры моделирования установлены следующим образом:
Solver (решатель): ode23tb; Maximum order (максимальный порядок): 5
Stop time (время остановки): 1.0
Max step size (размер максимального шага): auto (авто); Initial step size (начальный размер шага): auto (авто); Relative tolerance (относительная погрешность): 1e-3; Absolute tolerance (абсолютная погрешность): auto (авто);
Workspace I/O: Load initial states (рабочая область вход/выход: загру-
зить начальное состояние): psbregulinit
Рисунок 2-18: Simulink диаграмма показательного примера (psbregulator.mdl)
Из-за нелинейностей в этом устройстве, вычисление начальных условий не было выполнено. Вместо этого, было выполнено долгое моделирование (10 с) иконечное состояние, было сохранено в файле psbreguldata.mat. Это конечное состояние используется как начальное состояния в этом показательном примере. Моделирование, следовательно, начинается для устано-
131
вившегося режима. При t=0.1 с, внезапно происходиткороткое замыкание и длится 100 мс (6 периодов). Потом идетпослеаварийный переходный процесс.
Нелинейный регулятор вызываетMATLAB функцию инициализации, чтобы вычислить gains (коэффициенты) перед моделированием. Хотя этот процесс был автоматизирован, не рекомендуется, чтобы Вы меняли любое значение в любом блоке.
Если Вы хотите изменить некоторые значения, надо запустить «долгое моделирование», и сохранить конечное состояние в файле psbregulinit.mat. Рисунок 2-19 показываетреакцию напряжения на зажимах генератора, угла нагрузки, и усилия управления регулятора. Из рисунка видно, что с этим регулятором стабилизация Vt получена меньше чем 0.25 секунд. Угол нагрузки долго стабилизируется, потому что постоянная времени механической части устройства намного больше, чем электрические постоянные времени. Если Вы хотите сравнить результаты с классическими регуляторами, замените: нелинейный регулятор тем же самым устройством возбуждения, Hydraulic Turbine (гидравлической гидротурбиной) и Governor block (блок регулятора), используемой в psbturbine демонстрационном примере. Вы заметите, что системе требуется больше времени для стабилизации, чем в этом показательном примере.
132
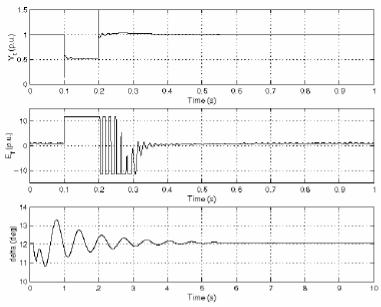
Рисунок 2-19: Результаты моделирования, полученные в показательном примере
Литература
[1] Akhrif O., F.A. Okou, L.A. Dessaint, and R. Champagne, “Application of a Multivariable Feedback Linearization Scheme for Rotor Angle Stability and Voltage Regulation of Power Systems.” IEEE Transactions on Power Systems, Vol. 14, No. 2, May 1999, pp. 620-628.
133
Раздел 4: Привод асинхронного двигателя переменной частоты
Этотпоказательный пример представляетпривод двигателя переменного тока с переменной частотой, в котором инвертор широтно-импульсной модуляции (ШИМ), используется как источник переменной частоты переменного напряжения, для питания асинхронного двигателя переменной скорости.
Привод, включая двигатель, силовой преобразователь, и устройство регулирования скорости, смоделированы, с помощью блоков библиотеки Power System Blockset и Simulink. Работа привода рассмотрена для различных условий эксплуатации: пуск, установившийся режим, и переходные процессы.
Цель этого примера состоитв том, чтобы продемонстрировать использование библиотеки Machine (машины), и блоков библиотеки Power Electronics (силовой электроники) в комбинации с блоками Simulink для моделирования сложного электромеханического устройства, работающего на высокой частоте. Электрическая часть привода двигателя переменного тока, включающая инвертор ШИМ построена, используя блок Universal Bridge (универсальный мост). Асинхронный двигатель представлен блоком Asynchronous Machine (асинхронная машина), который моделирует, и электрическую, и механическую динамику. Система управления, включающая регуляторы тока и скорости построена, используя блоки Simulink. Интерфейс между электрическими блоками и системой управления обеспечен блоками биб-
лиотеки Measurement (измерения) powersys.
Описание приводаасинхронного двигателя
Асинхронному двигателю нужен трехфазный источник переменной частоты для работы на переменной скорости. Этотисточник можетбыть реализован, используясистему силового преобразователя, состоящего из выпрямителя, связанного с инвертором через DC link (звено постоянного тока).
На рисунке 2-20 показана блок-схема цепи электропитания типичного привода асинхронного двигателя переменной частоты.
134

Рисунок 2-20: Привод асинхронного двигателя переменной частоты
Переменного напряжения сети преобразуется в постоянного напряжение, с помощью выпрямителя. Гармоники фильтруются фильтром LC, чтобы сгладить постоянного напряжение, которое подается на вход инвертора.
Рисунок 2-21: Трехфазный IGBT инвертор
Инвертор состоитиз шести силовых ключей, которые могутбыть metal- oxide-semiconductor-field-effect transistors (транзистор металлического – окисного – полупроводника – поля – действия) (MOSFET), или gate-turn-off thyristors (тиристор выключения выхода) (GTO), или insulated-gate-bipolar transistors (биполярные изолированный – выход транзистор) (IGBT), и выбираются в зависимости отнагрузочной способности по мощности привода и частоты переключений инвертора (Гц). На рисунке 2-21 показана упрощенная диаграмма трехфазного IGBT инвертора.
Инвертор преобразовываетпостоянное напряжение в регулируемое трехфазное переменное напряжение. Для управления выходным напряжением и частотой инвертора используются различные схемы управления. Одна
135
из наиболее используемых схем является широтно-импульсная модуляция (ШИМ), в которой трехфазная переменная синусоидальная разность потенциалов получена с помощью модуляции включения и выключения силовых ключей.
Вкомплектных электроприводах, инвертор ШИМ работаеткак трехфазный источник переменной частоты и напряжения, с фундаментальной частотой, изменяющейся в диапазоне отноля до утроенной номинальной частоты двигателя.
Внекоторых схемах управления, где требуется трехфазный источник тока переменной частоты, добавляютконтуры управления током, чтобы токи двигателя следовали за токами задания (обычно синусоидальными).
Питаемый инвертором привод асинхронного двигателя можетуправляться, используя различные схемы в зависимости отвключения, требуемой работы, и сложности проектирования регулятора. Наиболее используемые схемы:
Stator V/Hz control (управление напряжением и частотой статора)
Stator currents and open loop flux control (токи статора и разомкнутое управление потоком)
Vector control (field-oriented control) (векторное управление (управле-
ние ориентированное на поле))
Direct torque control (DTC) (прямое управление вращающим моментом)
Field-Oriented (ориентированный наполе) привод асинхронного двигателя переменной скорости
Вэтом показательном примере, мы рассмотрим привод асинхронного двигателя переменной скорости, используя управление Field-Oriented (ориентированное на поле). Вэтой схеме управления, d-q координаты привязаны к статору, блокированный вектор потока ротора, используется, чтобы достигнуть разъединения между потоком и вращающим моментом двигателя. Таким образом, они могутотдельно управляться с помощью продольной оси тока статора и током осей сдвинутых на 90°, также как в двигателе постоянного тока. На рисунке 2-22 показана блок-схемаfield-oriented (ориентируемого на поле) привода асинхронного двигателя.
136
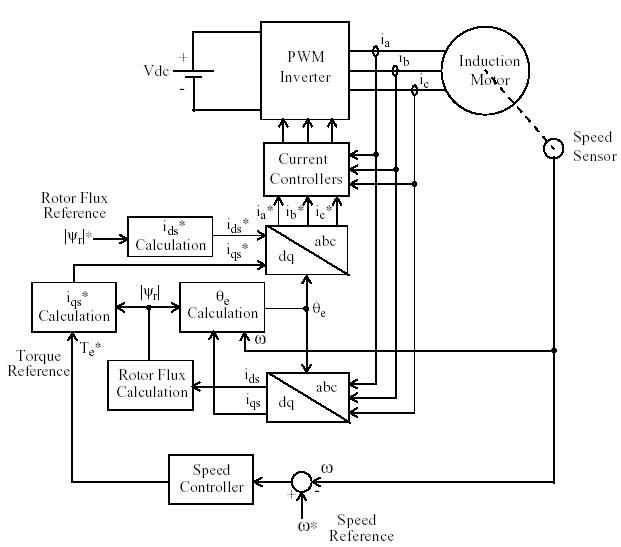
Рисунок 2-22: Field-Oriented (ориентированный на поле) привод асинхронного двигателя переменной частоты
Асинхронный двигатель питается управляемым током ШИМ инвертора, который работаеткак трехфазный синусоидальный источник тока. Скорость двигателя ω сравнивается с заданием скорости ω*, ошибка обрабатывается регулятором скорости, чтобы произвести задание вращающего момента Te*.
Как показано на рисунке 2-23, поток ротора и вращающий моментмогут отдельно управляться с помощью тока статора по продольной оси ids и током iqs осей сдвинутых по фазе на 90°.
137

Рисунок 2-23: Принцип управления Field-Oriented (ориентированный на поле)
Ток статора осей сдвинутых на 90° задается iqs*, рассчитывается отвращающего момента, который задается Te* как
* |
|
2 |
|
2 |
|
L |
r |
|
|
T* |
||
iqs |
= |
|
|
|
|
|
|
|
e |
|||
3 |
p |
Lm |
|
ψr |
|
est |
||||||
|
|
|||||||||||
где Lr – индуктивность ротора, Lm – взаимоиндуктивность, и |ψr|est – оцененное сцепление потока ротора, заданное
|
|
ψ |
r |
|
est |
= |
Lm ids |
|
|
||||||
|
|
|
|
|
1+τr s |
||
|
|
|
|
|
Где τr = Lr/Rr - постоянная времени ротора.
Ток статора продольной оси задается ids*, который получается из задания потока ротора |ψr|*.
ids* = |
|
|
ψ |
r |
|
* |
|
|
|||||
|
|
|
|
|
||
|
|
Lm |
||||
|
|
|
||||
Положение потока ротора θe требуемое для преобразования координат отсчитывается отротора, со скоростью ωm и частотой скольжения ωsl.
138
θe = ∫(ωm +ωsl )dt
Частота скольжения рассчитывается через ток задания статора iqs* и параметры двигателя.
ω |
|
= |
Lm |
|
Rr |
i* |
|
|
|
|
Lr |
||||
|
sl |
|
ψr |
est |
|
qs |
|
Токи задания iqs* и ids* преобразуются в фазные токи, задания ia*, ib*, ic* для регуляторов тока. Регуляторы отрабатывают измеренные токи и токи задания, чтобы произвести сигналы для вентилей инвертора.
Роль регулятора скорости — поддерживать скорость двигателя равной заданию скорости для установившегося режима и обеспечивать хорошую динамику в течение переходных процессов. Он можетиметь пропорциональноинтегральный (ПИ) тип.
Моделирование привода асинхронногодвигателя
Откройте файл psbacdrive.mdl библиотеки powerlib , напечатав psbacdrive в окне команд MATLAB. Появится принципиальная схема — psbacdrive. Перед запуском примера, сохраните эту схему как case4.mdl в вашем рабочем каталоге, чтобы Вы могли делать дальнейшими модификациями без изменения первоначального файла.
На рисунке 2-24 представлена диаграмма psbacdrive, в которой используются блоки из библиотек Power System Blockset и Simulink, для моделирования привода асинхронного двигателя.
139

Рисунок 2-24: Приводасинхронного двигателя переменнойскорости FieldOriented (ориентированный на поле) (psbacdrive.mdl)
Асинхронный двигатель смоделирован блоком Asynchronous Machine (асинхронная машина). Двигатель, используемый в этом показательном примере — 50 л.с., 460 В, 4 полюса, двигатель на 60 Гц, имеющий следующие
параметры: Rs = 0.087 Ом, Lls = 0.8 мГн, Lm = 34.7 мГн, Rr = 0.228 Ом, Llr = 0.8 мГн.
Цепь ШИМ инвертора управляемого током представлена на рисунке 2- 24. IGBT инвертор смоделирован блоком Universal Bridge (универсальный мост), в котором Power Electronic device (силовые электронные устройства) и Port configuration (конфигурация входов/выходов) выбраны как
IGBT/Diode (IGBT/диод) и ABC as output terminals (ABS - выходы) соот-
ветственно. DC link (звено постоянного тока) представлено 780 Висточником постоянного напряжения.
Регулятор тока, который состоитиз трех гистерезисных регуляторов, построен с помощью блоков Simulink. Токи двигателя вычисляются c помощью измерительного выхода блока асинхронной машины.
140