

Формирование матричных уравнений состояния электрической цепи
Конфигурацию схемы замещения электрической системы можно отобразить в виде графа. Граф представляет собой множество вершин (узлов) и ребер (ветвей), соединяющих некоторые (а может быть и все) пары вершин. Любая часть графа называется подграфом. Совокупность ребер, соединяющих две произвольные вершины, образует подграф, определяемый как путь графа. Если начальная и конечная вершины пути графа совпадают, то этот путь графа является замкнутым и образует контур.
Если в графе можно выбрать путь, который соединяет его любые две вершины, то этот граф является связанным, если нельзя,— то несвязанным. Если ребра графа имеют фиксированные направления, то этот граф называется направленным. Каждое ребро направленного графа имеет начальную и конечную вершины; его направление принимается от первой вершины ко второй.
Схема замещения электрической системы обычно является связанным графом. Она состоит из ветвей (ребер), соединенных в узлы (вершины). Ветви образуют цепочки (пути графа), которые могут быть замкнутыми. Все величины, характеризующие состояние ветвей (токи, ЭДС, падения напряжения), имеют определенное направление (без чего не может быть рассчитан режим данной схемы). В связи с этим целесообразно каждой ветви схемы придать определенное (произвольно выбранное) направление. Таким образом, схема замещения системы обычно является связанным направленным графом, ребрами которого служат ветви, а вершинами —узлы.
Н а
рис. 3 в виде связанного направленного
графа показана схема (см. рис. 2), на
которой выбраны направления ветвей, а
также указаны номера ветвей и узлов.
а
рис. 3 в виде связанного направленного
графа показана схема (см. рис. 2), на
которой выбраны направления ветвей, а
также указаны номера ветвей и узлов.
При изображении схем в виде графов нет надобности в специальных обозначениях сопротивлений и ЭДС. Ветви графически изображаются (прямой или кривой) с указанием их направлений (рис. 3). Таким образом, направление ветви от начальною узла к конечному одновременно является положительным направлением для всех участвующих величин – ЭДС, тока и падения напряжения. Любая из этих величин может получиться положительной или отрицательной по отношению к принятому направлению.
Для направленного графа могут быть определены:
1) матрица соединений ветвей в узлах;
2) матрица соединений ветвей в независимые контуры.
Составление матрицы соединений ветвей в узлах
Прямоугольная матрица, число строк которой равно числу вершин графа n (узлов схемы), а число столбцов – числу ребер m (ветвей схемы):
![]() .
.
При этом номера строк i соответствуют номерам вершин, а номера столбцов j – номерам ребер. Элементы матрицы MΣ могут принимать одно из трех значений:
mij = + 1, если узел i является начальной вершиной ветви j;
mij = – 1, если узел i является конечной вершиной ветви j;
mij = 0, если узел i не является вершиной ветви j.
Каждая строка матрицы MΣ показывает, какими вершинами соответствующие ветви присоединяются к данному узлу схемы; каждый столбец – какие узлы являются начальной и конечной вершинами данной ветви. Очевидно, что в каждом столбце матрицы может быть только одна положительная и только одна отрицательная единицы, остальными элементами являются нули. Для практических расчетов
![]()
Выбрав узел е в качестве балансирующего, получим матрицу М из MΣ путем исключения последней строки:
![]() .
.
По этой матрице можно восстановить исключенную строку (должна быть одна +1 и одна –1), то есть восстановлена вся схема.
Составление матрицы соединений ветвей в независимые контуры
Прямоугольная матрица, число строк которой равно числу независимых контуров k, а число столбцов – число ребер m (ветвей схемы):
![]()
При этом номера строк i соответствуют номерам независимых контуров, а номера столбцов j – номерам ветвей. Элементы матрицы N определяются следующим образом:
nij = + 1, если ветвь j входит в контур i и их направления совпадают;
nij = – 1, если ветвь j входит в контур i и их направления противоположны;
nij = 0, если ветвь j не входит в контур i.
Каждая строка матрицы показывает, какие ветви входят в состав соответствующего независимого контура и какое направление они имеют относительно направления контура. Каждый столбец матрицы показывает, в состав каких независимых контуров входит данная ветвь и совпадает ли ее направление с направлениями этих контуров. Напоминание: число независимых контуров – на одно меньше (как минимум) общего количества контуров.
Для графа на рис. 3 матрица N имеет вид:
![]()
Матрицы M и N дают возможность записать уравнения состояния электрической цепи в матричной форме.
Обобщенное уравнение состояния электрической цепи, вид которого не зависит от ее конфигурации и числа элементов:
![]() ,
,
где I – токи в ветвях (неизвестные);
J – задающие токи в узлах (токи нагрузки);
Zв – сопротивления ветвей (диагональная матрица);
Еk – алгебраическая сумма ЭДС ветвей, входящих в каждый независимый контур.
Эти уравнения можно объединить в одно, если матрицы М и NZB рассматривать как блоки одной объединенной матрицы параметров схемы замещения системы:
![]() ,
,
а матрицы J и Ёк рассматривать как блоки одной объединенной матрицы исходных параметров режима:
![]() .
.
При этом обобщенное уравнение состояния принимает вид
AI = F.
Здесь матрица А является квадратной, поэтому полученное уравнение состояния можно решить относительно матрицы токов ветвей.
Найдем обобщенное уравнение для схемы на рис. 2 и графа на рис. 3. Определим матрицы NZв и Еk:
![]() ;
;
![]()
Обобщенное уравнение состояния в развернутом виде запишется:
![]() .
.
Для формирования обобщенного уравнения состояния необходимо предварительно определить матрицы соединений М и N, которые в аналитической форме отображают конфигурацию схемы замещения электрической системы. Матрицу М составить несложно. Другую – N – может быть затруднительно, так как требуется выделить независимые контуры, число которых может быть значительным. Кроме того, матрица N в общем случае не содержит полной информации о конфигурации рассматриваемой системы, так как разомкнутые части схемы в ней не отражаются. Например, ветвь 6 на рис. 3 представлена в матрице N нулевыми элементами и присоединение ее к любому другому узлу не изменяет матрицу N.
Из сопоставления способов формирования уравнений состояния электрической цепи непосредственно по ее схеме и в обобщенной форме с использованием матриц М и N следует, что по трудоемкости оба способа примерно равноценны, причем основная трудность заключается в составлении уравнений для независимых контуров в первом случае и матрицы N — во втором. Очевидно, что при первом подходе эта трудность принципиально неустранима, тогда как при использовании обобщенных уравнений состояния ее можно избежать, если формализовать процесс составления матрицы N. Возможность такой формализации обусловлена тем, что матрица М содержит в себе исчерпывающую информацию о конфигурации схемы, в том числе и необходимую для составления матрицы N. Для реализации этой возможности необходимо установить аналитическую зависимость, связывающую матрицы М и N.
Численные методы линейной алгебры
Это: численные методы решения систем линейных алгебраических уравнений, обращения матриц, вычисления определителей и нахождения собственных значений и собственных векторов матриц.
Методы решения систем линейных алгебраических уравнений делятся на две группы:
– точные или прямые методы: алгоритмы, позволяющие получить решение системы за конечное число арифметических действий (правило Крамера нахождения решения с помощью определителей, метод Гаусса (метод исключений) и метод прогонки);
– приближенные методы (итерационные);
Правило Крамера в ЭВМ не применяется, так как требует значительно большего числа арифметических действий, чем метод Гаусса. Метод Гаусса используется в ЭВМ при решении систем до порядка 10 3, а итерационные методы – до порядка 10 6.
Метод Гаусса. Рассмотрим систему линейных алгебраических уравнений 4-го порядка:
Система неоднородных уравнений (правая часть не равна 0) называется совместной, если существует хотя бы одно решение, и несовместной, если ни одного решения не существует. Признак совместности: система совместна тогда и только тогда, когда ранг матрицы (коэффициентов) равен рангу расширенной матрицы (добавляется столбец правой части). Совместная система уравнений называется определенной, если она имеет единственное решение, и неопределенной, если решений – бесконечное множество.
Иначе говоря, отличие определителя системы от нуля – необходимое и достаточное условие существования единственного решения системы.
В случае равенства нулю определителя система либо не имеет решения, либо имеет их бесчисленное множество.
Если определитель системы близок к нулю, то говорят, что система плохо обусловлена. В этом случае найти численное решение системы трудно, а точность его весьма сомнительна.
Предположим, что коэффициент а011 , называемый ведущим элементом первой строки, не равен 0. Разделив первое из уравнений системы на а011, получим новое уравнение (2):
И![]() сключим
неизвестную х1 из каждого уравнения
системы, начиная со второго, путем
вычитания уравнения (2), умноженного на
коэффициент при х1 в соответствующем
уравнении. Преобразованные уравнения
имеют вид (3):
сключим
неизвестную х1 из каждого уравнения
системы, начиная со второго, путем
вычитания уравнения (2), умноженного на
коэффициент при х1 в соответствующем
уравнении. Преобразованные уравнения
имеют вид (3):
а122х2 + а123х3 + а124х4 = а125,
а132х2 + а133х3 + а134х4 = а135,
а142х2 + а143х3 + а144х4 = а145.
Допустим, что ведущий элемент второй строки, т.е. коэффициент а122, тоже отличен от 0. Тогда, разделив на него первое из уравнений в (3), получим уравнение (4): х2 + а223х3 + а224х4 = а225. Исключив с помощью уравнения (4) неизвестную х2 из двух последних уравнений в (3), и так далее, придем к решению х4 = а445.
Итак, если ведущие элементы а011, а122, а233, а344 отличны от нуля, то система (1) эквивалентна следующей системе с треугольной матрицей (5):
х1 + а112х2 +а113х3+а114х4=а115
х2 +а223х3+а224х4=а225
х3+а334х4=а335
х4 = а445.
Из этой системы неизвестные х находятся явно в обратном порядке.
Процесс приведения системы (1) к треугольному виду называется прямым ходом, а нахождение неизвестных по формулам – обратным ходом метода Гаусса.
Число арифметических действий, выполняемых при решении системы линейных алгебраических уравнений порядка n методом Гаусса = (2/3)* n3.
Рассмотренный выше простейший вариант метода Гаусса (схема единственного деления) имеет недостатки:
– если ведущий элемент какой-либо строки окажется равным нулю, то эта схема формально непригодна, хотя система может иметь единственное решение. Кроме того, если определитель системы не равен нулю, но в процессе вычислений встречаются ведущие элементы, которые достаточно малы по сравнению с другими элементами соответствующих строк, то погрешность округления будет оказывать значительное влияние на точность результата.
Метод Гаусса-Жордана
Наибольшая точность решения достигается тогда, когда ведущий элемент строки имеет наибольшее значение. Поэтому строку с нулевым или малым ведущим элементом на ту из стоящих под ней строк, в которой в том же столбце стоит элемент, имеющий наибольшее значение.
Отличие метода Гаусса-Жордана от метода Гаусса в том, что преобразованная матрица имеет диагональный вид и нет необходимости в обратном ходе.
Схема с выбором главного элемента.
Так же, как и в методе Гаусса-Жордана, добиваемся наибольшего значения ведущих элементов, но уже перестановкой не только уравнений, но и столбцов неизвестных со своими неизвестными.
При определителе системы не равном нулю всегда приводит к единственному решению и менее чувствительна к погрешностям округления.
Пусть дана система (1). Сначала добиваемся выполнения условий |a011|>=|a0ij| путем перестановки в случае необходимости двух уравнений системы (1), а также двух столбцов неизвестных со своими коэффициентами, и соответствующей перенумерации коэффициентов и неизвестных. Найденный максимальный по модулю коэффициент называется первым главным элементом. Затем исключаем х1 согласно предыдущей схеме. Далее с полученной системой уравнений поступаем аналогично исходной (выбираем максимальный по модулю второй главный элемент и т.д.). Обратный ход выполняется также аналогично. Перейдя к первоначальной нумерации уже найденных неизвестных, получим решение заданной системы уравнений.
Итерационные методы решения СЛАУ
Для решения СЛАУ итерационными методами система уравнений (1) преобразуется к виду:
х 1
= (а1, n+1
– a11 x1
– a12
x2 –…–
a1n xn)
/ a11 +
x1,
1
= (а1, n+1
– a11 x1
– a12
x2 –…–
a1n xn)
/ a11 +
x1,
х2 = (а2, n+1 – a21 x1 – a22 x2 –…– a2n xn) / a22 + x2, (9)
…………………………………………………
хn = (аn, n+1 – an1 x1 – an2 x2 –…– ann xn) / ann + xn,
Задав столбец начальных приближений х01, х02 , …, х0n, подставим их в правые части системы (9) и вычислим новые приближения х11, х12 , …, х1n, которые опять подставим систему и т.д. Таким образом, организуется итерационный процесс, который является обобщением метода простых итераций на системы уравнений:
х 1(m+1)
= 1
( х1(m),
х2(m),
… , хn(m)
),
1(m+1)
= 1
( х1(m),
х2(m),
… , хn(m)
),
х2(m+1) = 2 ( х1(m), х2(m), … , хn(m) ), (10)
………………………………….
хn(m+1) = n ( х1(m), х2(m), … , хn(m) ),
Метод Якоби использует произвольно
выбранные начальные приближения
![]() для вычисления
для вычисления
![]() и т.д. до тех пор, пока не будет достигнута
точность, либо станет очевидно, что
процесс расходится.
и т.д. до тех пор, пока не будет достигнута
точность, либо станет очевидно, что
процесс расходится.
Эффективнее использовать метод Гаусса-Зейделя – прием последовательной подстановки уже вычисленных "новых" значений.
х 1(m+1) = 1 ( х1(m), х2(m), … , хn(m) ),
х2(m+1) = 2 ( х1(m+1), х2(m), … , хn(m) ), (11)
………………………………….
хn(m+1) = n ( х1(m+1), х2(m+1), … , хn(m) ).
Для сходимости итерационных методов необходимо, чтобы значения диагональных элементов матрицы СЛАУ были преобладающими по абсолютной величине по сравнению с другими элементами. Условие сходимости можно обеспечить преобразованием исходной матрицы путем перестановки уравнений и неизвестных.
![]() ,
(8)
,
(8)
Эти методы можно применять и к решению систем нелинейных уравнений. Итерационный процесс заканчивается, когда выполняется условие | хk(m+1) – хk(m)| < , где – заданная погрешность.
Применение ЭВМ для оптимального проектирования систем электроснабжения
(справочник по электроснабжению и электрооборудованию: В 2 т./ Под общ. ред. А. А. Федорова – М.: Энергоатомиздат, 1986, 568 с.)
Решение проектных и эксплуатационных задач промышленного электроснабжения связано с применением различных математических методов. На стадии проектирования инженер сталкивается с необходимостью решения задачи выбора схемы, конфигурации сети и ее элементов, а на стадии эксплуатации – повышения экономичности работы системы электроснабжения, т. е. оптимизации режима.
С точки зрения объема исходных данных для решения проектных и эксплуатационных задач современные системы электроснабжения можно отнести к классу больших систем с неполно заданной информацией. Поэтому в настоящее время разработаны и продолжают разрабатываться эффективные методы их расчета и оптимизации.
В задачах энергетики оптимизация — это стремление математически сформулировать наилучшие условия работы системы, представив их в виде целевой функции, и определить значения регулируемых параметров, соответствующих экстремальному значению целевой функции.
При оптимальном проектировании систем электроснабжения необходимо решить ряд задач. Основными из этих задач являются:
1) выбор элементов систем электроснабжения (числа и мощности трансформаторов, сечений проводов, шин и жил кабелей и т. д.);
2) выбор основных параметров систем электроснабжения (электрических нагрузок, рационального напряжения);
3) определение оптимальной топологии электрической сети;
4) выбор режимов работы систем электроснабжения.
Цель оптимального проектирования систем электроснабжения может заключаться в снижении начальных капитальных или эксплуатационных затрат, повышении надежности проектируемой системы. Чаще всего это сокращение приведенных годовых затрат.
Если целевая функция задана алгоритмически (конечным числом способов реализации решения), то оптимизацию сводят к простому перебору вариантов и выбору наилучшего из них по известному критерию оптимальности. Такое решение возможно для задач с небольшим числом дискретных значений регулируемого параметра, например выбор рационального напряжения, сечения проводника. При большом числе возможных значений регулируемых параметров общее число вариантов оказывается значительным, и даже с помощью ЭВМ решить задачу за приемлемый промежуток времени оказывается невозможным. В этом случае используют методы нахождения экстремума целевой функции F(x1, х2, ..., хn) (методы оптимизации).
В простейшем случае дифференцируемости целевой функции и неравенства нулю вторых производных задача сводится к решению п алгебраических уравнений
![]() (7)
(7)
В классической математике разработаны методы решения и доказательства принципиальной разрешимости уравнений вида (7), что привело к созданию так называемых аналитических методов оптимизации. Из аналитических методов оптимизации в практике проектирования систем электроснабжения широко применяют метод неопределенных множителей Лагранжа, отличающийся простотой и наглядностью.
Сущность метода заключается в следующем. Пусть необходимо оптимизировать выпуклую целевую функцию от п переменных
F(x1, х2, ..., хn) (8)
Область допустимых решений определяется m уравнениями связи
ψj(x1, х2, ..., хn) = 0, j = 1, 2, ..., т. (9)
Составляют вспомогательную функцию
![]() (10)
(10)
где λ1, λ2, …, λm – неопределенные множители Лагранжа. Необходимым условием существования экстремума функции (10) является равенство нулю ее частных производных
 (11)
(11)
Систему уравнений (11) преобразуют к виду
 (12)
(12)
Решение п + т уравнений (12) относительно п + т неизвестных дает искомые значения переменных х,, х2, ..., хп.
Метод неопределенных множителей Лагранжа эффективен при небольшом числе переменных и ограничений; с увеличением же числа переменных и ограничений на них сложность решения уравнений (12) резко возрастает. Поэтому наряду с аналитическими методами большое развитие получили методы линейного, нелинейного и динамического программирования. Реальные задачи математического программирования достаточно сложны и, как правило, не могут быть решены без использования ЭВМ.
Математически задачу линейного программирования ставят следующим образом: ищут минимум линейной формы
![]()
![]() (13)
(13)
при соблюдении ограничений
![]() (14)
(14)
Неравенства (13) можно свести к строгим равенствам, добавив переменную xn+1:
![]() (15)
(15)
Тогда условие (14) сводится к (15) и условию неотрицательности переменной xn+1. Поэтому при решении задачи линейного программирования определяют такие значения п переменных х, которые бы обращали в минимум линейную форму (13) при условии выполнения m равенств (15).
Применение методов решения задачи линейного программирования в технико-экономических расчетах систем электроснабжения возможно, когда с относительно небольшой погрешностью нелинейные функции затрат Зi от расчетной мощности Spi на различные элементы сети могут быть аппроксимированы линейными зависимостями вида
![]() (16)
(16)
где b, с — постоянные коэффициенты для каждой типовой группы элементов электрической сети; m – число элементов схемы электроснабжения.
Линеаризация затрат позволяет получить простую функцию цели (линейная функция от расчетной мощности) следующего вида:
![]() .
.
В результате появляется возможность использовать для определения искомых оптимальных значений параметров хорошо разработанные методы решения задачи линейного программирования, например симплекс-метод.
Методы решения задачи линейного программирования достаточно подробно излагаются в соответствующей литературе. Разработаны также стандартные программы для решения подобных задач на ЭВМ.
Нелинейное программирование является наиболее общей задачей математического программирования и включает в себя методы определения минимума функции п переменных
F(x1, х2, ..., хn) (17)
при m + п ограничениях
![]() (18)
(18)
![]() (19)
(19)
В общем случае функции F(x1, х2, ..., хn) и ψj(x1, х2, ..., хn) бывают произвольными и, в частности, линейными. Допускают любые соотношения между п и т.
Задачи нелинейного программирования по сравнению с задачами линейного программирования обладают большим разнообразием. Решение задач нелинейного программирования может давать два или более экстремума. Теоретически наиболее широко и детально в нелинейном программировании разработан раздел квадратичного программирования, т. е. для методов решения задач квадратичного программирования найдены соотношения, являющиеся необходимыми и достаточными условиями оптимума, и алгоритмы поиска экстремума с доказательством их сходимости. Функции (17), (18) в этом случае представляют в виде суммы линейной и квадратичной форм
![]() (20)
(20)
Методы квадратичного программирования применяют, например, для решения задач оптимального распределения реактивной мощности, так как потери активной мощности являются квадратичной функцией реактивной мощности. В настоящее время нет универсальных методов решения задачи нелинейного программирования. В зависимости от свойств целевой функции (17) и ограничений (18) эффективным может оказаться тот или иной метод. Сравнительная оценка методов и подбор наилучшего из них являются сложной задачей и во многом зависят от опыта программиста, так как незначительная доработка алгоритма может существенно повысить эффективность метода.
Основной недостаток методов нелинейного программирования заключается в том, что с их помощью не удается найти глобальный экстремум при наличии нескольких локальных экстремумов. Определить глобальный экстремум можно лишь методом динамического программирования.
Метод наименьших квадратов
Пусть мы имеем экспериментальные данные, и нам необходимо провести аппроксимирующую кривую, которая не проходит через экспериментальные точки, но в то же время отражает исследуемую зависимость и сглаживает разброс значений за счет погрешности эксперимента. Применяется метод наименьших квадратов.
Имеем таблицу экспериментальных данных
-
хi
x1
x2
x3
xn
yi = f (xi)
y1
y2
y3
yn
Введем непрерывную функцию (х) для аппроксимации дискретной зависимости f (xi). В узловых точках функции (х) и f (x) будут отличаться на величину i = (xi) – f (xi). Отклонения могут принимать положительные и отрицательные значения. Чтобы не учитывать знаки, возведем каждое отклонение в квадрат и просуммируем квадраты отклонений по всем узлам:
![]() .
.
Метод построения аппроксимирующей функции (х) из условия минимума величины Q называется методом наименьших квадратов (МНК).
Далее: из условия Q' = 0 находятся неизвестные параметры.
Пример: парабола, линейная аппроксимация.
Динамическое программирование позволяет решать задачи, в которых процесс принятия решений может быть разбит на отдельные этапы. При этом не имеет значения, протекает ли процесс во времени или представляет собой многошаговую формальную процедуру. Однако его применение зависит от определенных условий, обеспечивающих выполнение принципа оптимальности Беллмана.
Условия, при которых может быть применен метод динамического программирования, следующие:
1) для рассматриваемой управляемой системы, которая под действием управления переходит из начального S0 в конечное Sn состояние, состояние в конце k-го этапа Sk зависит только от предшествующего состояния Sk-1, и управления на данном этапе Uk. Это свойство получило название отсутствия последствия;
2) целевая функция должна быть аддитивной, т. е. должна представлять собой сумму частных функций, рассчитанных на отдельных этапах:
![]() .
.
Принцип оптимальности Беллмана может быть сформулирован следующим образом: последующие решения должны составлять оптимальное поведение относительно предыдущего состояния, полученного в результате решения на предыдущем этапе, независимо от того, какими бы эти состояние и решение ни были. Это положение в аналитической форме можно записать в виде следующего соотношения:
![]() .
.
Динамическое программирование можно представить как некоторый оптимальный метод перебора вариантов. Это достигается за счет того, что на каждом этапе процесса рассматривают лишь оптимальное его предложение. С помощью метода динамического программирования в настоящее время достаточно эффективно решают задачи энергетики (например, оптимизация развития электрических сетей, выбор варианта развития линий электропередачи, совместный выбор компенсирующих и регулирующих устройств в системе электроснабжения и др.).
Схемы замещения воздушных и кабельных линий электропередачи
(Герасименко А.А., Федин В.Т. Передача и распределение электрической энергии. – Ростов н/Д: Феникс, 2008.- 715 с.)
Общие характеристики
Параметры фаз линий электропередач равномерно распределены по ее длине, т.е. линия электропередачи представляет собой цепь с равномерно распределенными параметрами. Точный расчет схемы, содержащей такую цепь, приводит к сложным вычислениям. В связи с этим при расчете линий электропередач в общем случае применяют упрощенные Т- и П-образные схемы замещения с сосредоточенными параметрами. Погрешности электрического расчета линии при Т- и П-образной схемах замещения примерно одинаковы. Они зависят от длины линии.
Д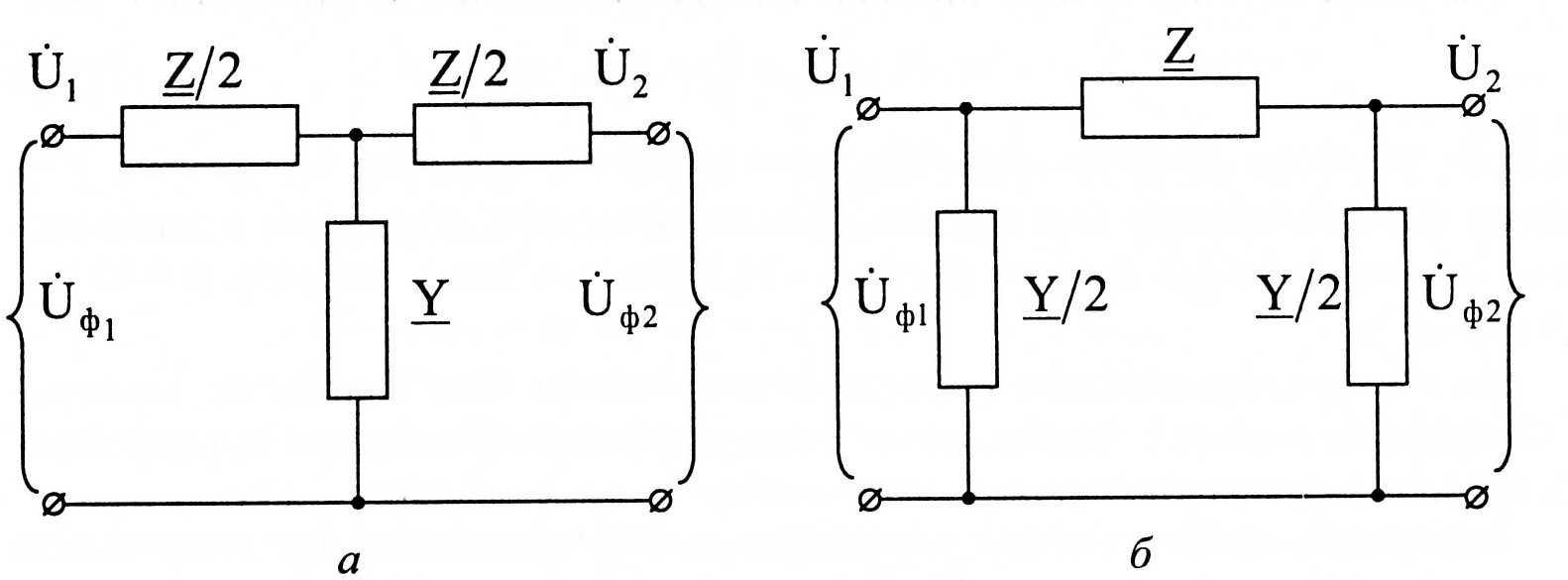 опущение
о сосредоточенности реально равномерно
распределенных параметров по длине
ЛЭП справедливо при протяженности
воздушных линий (ВЛ), не превышающей
300—350 км, а для кабельных линий (КЛ) 50—60
км. Для ЛЭП большей длины применяют
различные способы учета распределенности
их параметров.
опущение
о сосредоточенности реально равномерно
распределенных параметров по длине
ЛЭП справедливо при протяженности
воздушных линий (ВЛ), не превышающей
300—350 км, а для кабельных линий (КЛ) 50—60
км. Для ЛЭП большей длины применяют
различные способы учета распределенности
их параметров.
Рис. 4. Схема замещения ЛЭП с сосредоточенными параметрами:
а — Т-образная; б — П-образная
Размерность схемы ЭС и, соответственно, системы моделирующих уравнений определяется числом узлов схемы. Поэтому в практических расчетах, в особенности с использованием ЭВМ, чаще используют П-образную схему замещения, имеющую одно преимущество — меньшую в 1,5 раза размерность схемы в сопоставлении с моделированием ЛЭП Т-образной схемой. Поэтому дальнейшее изложение будет вестись применительно к П-образной схеме замещения ЛЭП.
Выделим в схемах замещения продольные элементы – сопротивления ЛЭП Z = R + jX и поперечные элементы – проводимости Y = G + jB. Значения указанных параметров для ЛЭП определяются по общему выражению
П = П0L,
где П = П (R0, X0, g0, b0) – значение продольного или поперечного параметра, отнесенного к 1 км линии протяженностью L, км. Иногда эти параметры именуются погонными.
Для ЛЭП конкретного исполнения и класса напряжения используют частные случаи этих схем в зависимости от физического проявления и величины (значения) соответствующего параметра. Рассмотрим кратко суть этих параметров.
Активное сопротивление обуславливает нагрев проводов (тепловые потери) и зависит от материала токоведущих проводников и их сечения. Для линий с проводами небольшого сечения, выполненных цветным металлом (алюминий, медь), активное сопротивление принимают равным омическому (сопротивлению постоянному току), поскольку проявление поверхностного эффекта при промышленных частотах 50—60 Гц незаметно (около 1 %). Для проводов большого сечения (500 мм2 и более) явление поверхностного эффекта при промышленных частотах значительно.
Активное погонное сопротивление линии определяется по формуле, Ом/км,
![]()
где ρ – удельное активное сопротивление материала провода, Ом-мм /км;
F – сечение фазного провода (жилы), мм2.
Активное сопротивление не остается постоянным. Оно зависит от температуры провода, которая определяется температурой окружающего воздуха (среды), скоростью ветра и значением проходящего по проводу тока.
Омическое сопротивление упрощенно можно трактовать как препятствие направленному движению зарядов узлов кристаллической решетки материала проводника, совершающих колебательные движения около равновесного состояния. Интенсивность колебаний и, соответственно, омическое сопротивление возрастают с ростом температуры проводника.
Трудность уточнения активного сопротивления линий в зависимости от температуры заключается в том, что температура провода, зависящая от токовой нагрузки и интенсивности охлаждения, может заметно превышать температуру окружающей среды. Необходимость такого уточнения может возникнуть при расчете сезонных электрических режимов.
При расщеплении фазы ВЛ на n одинаковых проводов в выражении необходимо учитывать суммарное сечение проводов фазы.
Индуктивное сопротивление обусловлено магнитным полем, возникающим вокруг и внутри проводника при протекании по нему переменного тока. В проводнике наводится ЭДС самоиндукции, направленная в соответствии с принципом Ленца, противоположно ЭДС источника
![]()
Противодействие, которое оказывает ЭДС самоиндукции изменению ЭДС источника, и обуславливает индуктивное сопротивление проводника. Чем больше изменение потокосцепления dψ/dt, определяемое частотой тока ω = 2πf (скоростью изменения тока di/dt), и величина индуктивности фазы L, зависящая от конструкции (разветвленности) фазы и трехфазной ЛЭП в целом, тем больше индуктивное сопротивление элемента X = ωL. To есть для одной и той же линии (или просто электрической катушки) с ростом частоты питающего тока f индуктивное сопротивление увеличивается. Естественно, что при нулевой частоте (ω = 2πf = 0), например, в сетях постоянного тока, индуктивное сопротивление ЛЭП отсутствует.
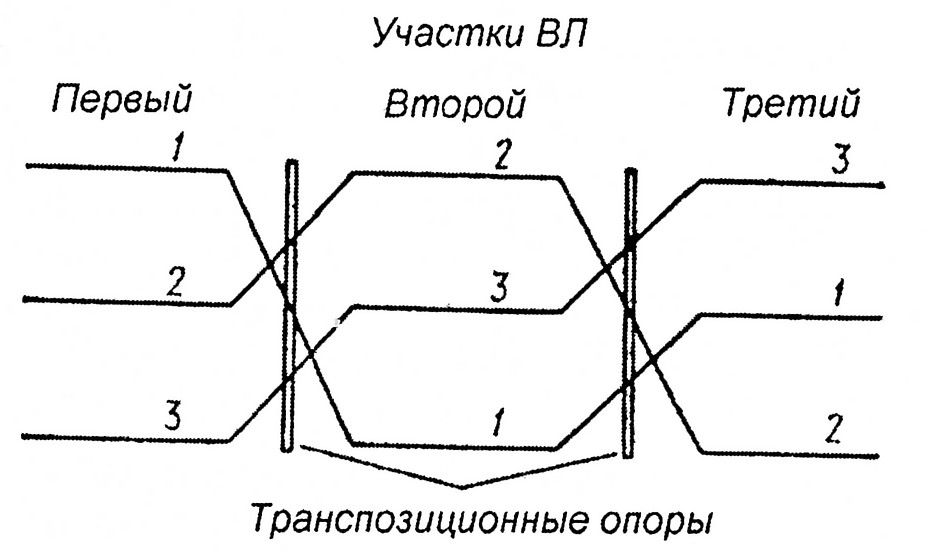
На индуктивное сопротивление фаз многофазных ЛЭП оказывает влияние также взаимное расположение фазных проводов (жил). Кроме ЭДС самоиндукции, в каждой фазе наводится противодействующая ей ЭДС взаимоиндукции. Поэтому при симметричном расположении фаз, например, по вершинам равностороннего треугольника, результирующая противодействующая ЭДС во всех фазах одинакова, а следовательно, одинаковы пропорциональные ей индуктивные сопротивления фаз. При горизонтальном расположении фазных проводов потокосцепление фаз неодинаково, поэтому индуктивные сопротивления фазных проводов отличаются друг от друга. Для достижения симметрии (одинаковости) параметров фаз на специальных опорах выполняют транспозицию (перестановку) фазных проводов.
Индуктивное сопротивление, отнесенное к 1 км линии, определяется по эмпирической формуле, Ом/км.
При сближении фазных проводов влияние ЭДС взаимоиндукции возрастает, что приводит к уменьшению индуктивного сопротивления ЛЭП. Особенно заметно снижение индуктивного сопротивления (в 3-5 раз) в кабельных линиях. Разработаны компактные ВЛ высокого и сверхвысокого напряжения повышенной пропускной способности со сближенными фазами с использованием эффекта взаимного влияния цепей и сниженным на 25-30 % индуктивным сопротивлением.
Отметим, что индуктивное сопротивление состоит из двух составляющих: внешней и внутренней. Внешнее индуктивное сопротивление определяется внешним магнитным потоком, образованным вокруг проводов, и значениями среднегеометрического расстояния между фазами и радиусом жилы. Естественно, что с уменьшением расстояния между фазами растет влияние ЭДС взаимоиндукции и индуктивное сопротивление снижается, и наоборот. У кабельных линий с их малыми расстояниями между токоведущими жилами (на два порядка меньше, чем в ВЛ) индуктивное сопротивление значительно (в 3-5 раз) меньше, чем у воздушных.
При расчетах обычно пользуются заводскими данными об индуктивном сопротивлении кабелей. Внутреннее индуктивное сопротивление определяется внутренним потоком, замыкающимся в проводах (приводится в справочной литературе).
Таким образом, активное сопротивление ЛЭП зависит от материала, сечения и температуры провода. Индуктивное сопротивление ЛЭП определяется исполнением линии, конструкцией фазы и практически не зависит от сечения проводов.
Емкостная проводимость обусловлена емкостями между фазами, фазными проводами (жилами) и землей. В схеме замещения ЛЭП используется расчетная (рабочая) емкость плеча эквивалентной звезды, полученной из преобразования треугольника проводимостей в звезду.
В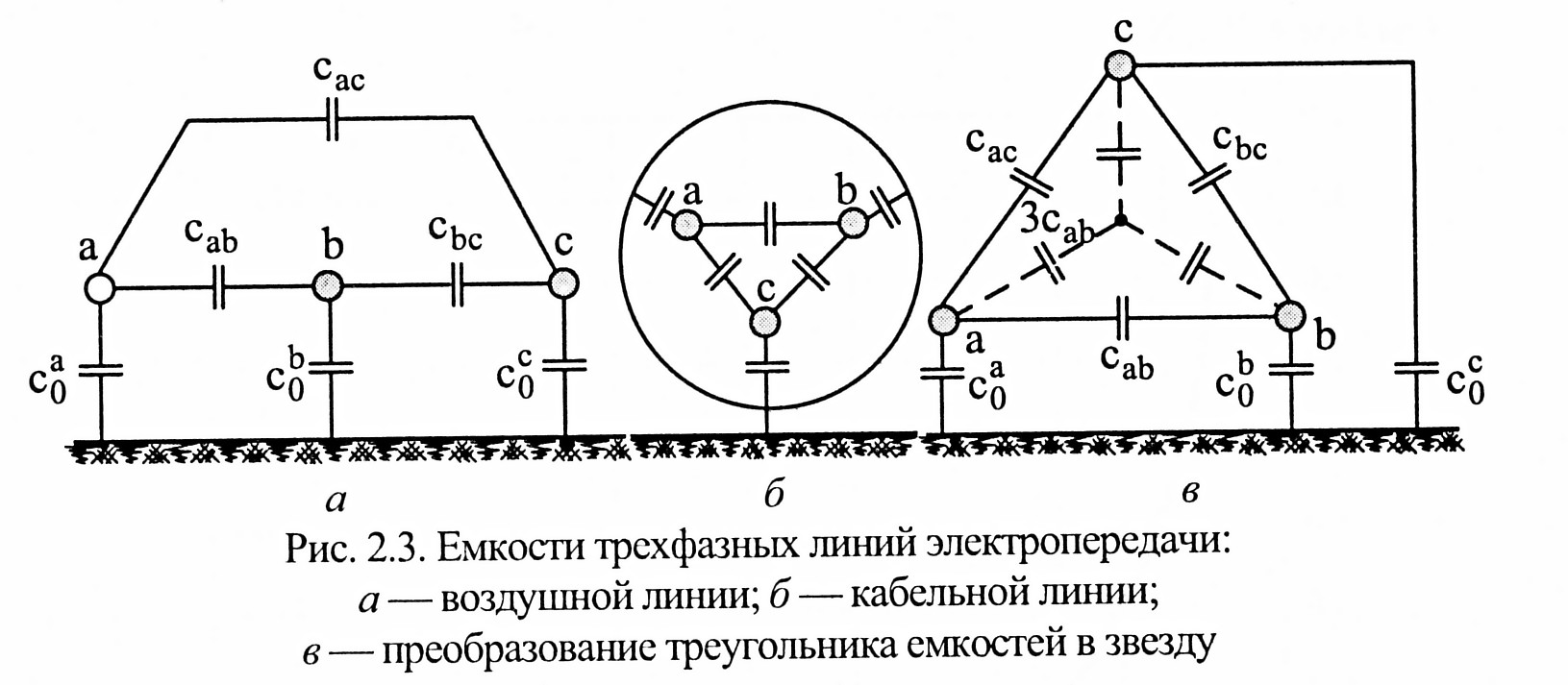 практических расчетах рабочую емкость
трехфазной ВЛ с одним проводом в фазе
на единицу длины (Ф/км) определяют по
формуле
практических расчетах рабочую емкость
трехфазной ВЛ с одним проводом в фазе
на единицу длины (Ф/км) определяют по
формуле
 (21)
(21)
Рабочая емкость кабельных линий существенно выше емкости ВЛ, так как жилы кабеля очень близки друг к другу и заземленным металлическим оболочкам. Кроме того, диэлектрическая проницаемость кабельной изоляции значительно больше единицы – диэлектрической проницаемости воздуха. Большое разнообразие конструкций кабеля, отсутствие их геометрических размеров усложняет определение ее рабочей емкости, в связи с чем на практике пользуются данными эксплуатационных или заводских замеров.
Емкостная проводимость ВЛ и КЛ, См/км, определяется по общей формуле
![]() (22)
(22)
Емкостная проводимость КЛ зависит от конструкции кабеля и указывается заводом-изготовителем, но для ориентировочных расчетов она может быть оценена по формуле (подставляем 21 в 22):
 (23)
(23)
Под действием приложенного к линии напряжения через емкости линий протекают емкостные (зарядные) токи. Тогда расчетное значение емкостного тока на единицу длины, кА/км,
![]() (23)
(23)
и отвечающая ему зарядная мощность трехфазной ЛЭП, Мвар/км,
![]() (24)
(24)
зависят от напряжения в каждой точке линии.
Значение зарядной мощности для всей ЛЭП определяется через действительные (расчетные) напряжения начала и конца линии, Мвар,
![]() (25)
(25)
либо приближенно по номинальному напряжению линии
![]() (26)
(26)
Для кабелей 6-35 кВ с бумажной изоляцией и вязкой пропиткой известны генерации реактивной мощности q0 на один километр линии, с учетом которой общая генерация КЛ определится в виде
![]() (27)
(27)
ЛЭП с поперечной емкостной проводимостью, потребляющая из сети опережающий напряжение емкостный ток, следует рассматривать как источник реактивной (индуктивной) мощности, чаще называемой зарядной. Имея емкостной характер, зарядная мощность уменьшает индуктивную составляющую нагрузки, передаваемой по линии к потребителю.
В схемах замещения ВЛ, начиная с номинального напряжения НО кВ, и в КЛ—35 кВ и более следует учитывать поперечные ветви (шунты) в виде емкостных проводимостей Вс или генерируемых ими реактивных мощностей Qc.
Расстояние между фазами ЛЭП в каждом классе напряжения, особенно для ВЛ, практически одинаково, что и определяет неизменность результирующего по-токосцепления фаз и емкостного эффекта линий. Поэтому для ВЛ традиционного исполнения (без глубокого расщепления фаз и специальных конструкций опор) реактивные параметры мало зависят от конструктивных характеристик линии, так как отношение расстояния между фазами и сечения (радиуса) проводов практически неизменны, что в приведенных формулах отражено логарифмической функцией.
При выполнении фаз ВЛ 35—220 кВ одиночными проводами их индуктивное сопротивление изменяется в узких пределах: Х0 =(0,40-0,44) Ом/км, а емкостная проводимость лежит в пределах b0 =(2,6-2,8)-10-6 См/км. Влияние изменения площади сечения (радиуса) жил кабеля на Х0 более заметно, чем в ВЛ. Поэтому для КЛ имеем более широкое изменение индуктивного сопротивления: Х0 = (0,06-0,15) Ом/км. Для кабельных линий всех марок и сечений напряжением 0,38-10 кВ индуктивное сопротивление лежит в более узком интервале (0,06-0,10 Ом/км) и определяется из таблиц физико-технических данных кабелей.
Среднее значение зарядной мощности на 100 км для ВЛ 110 кВ составляет около 3,5 Мвар, для ВЛ 220 кВ — 13,5 Мвар, для ВЛ 500 кВ — 95 Мвар. Учет этих показателей позволяет исключить значительные ошибки при расчете параметров линий или использовать указанные параметры в приближенных расчетах.
Активная проводимость обусловлена потерями активной мощности из-за несовершенства изоляции (утечки по поверхности изоляторов, токов проводимости (смещения) в материале изолятора) и ионизации воздуха вокруг проводника вследствие коронного разряда.
Потери в изоляции ВЛ незначительны, и явление коронирования в ВЛ возникает только при превышении напряженности электрического поля у поверхности провода. Критическая величина – около 17-19 кВ/см. Такие условия для коронирования возникают в ВЛ 110 кВ и более высокого напряжения.
Коронирование и, соответственно, потери активной мощности сильно зависят от напряжения ВЛ, радиуса провода, атмосферных условий и состояния поверхности провода. Чем больше рабочее напряжение и меньше радиус проводов, тем больше напряженность электрического поля. Ухудшение атмосферных условий (высокая влажность воздуха, мокрый снег, изморозь на поверхности проводов), заусенцы, царапины также способствуют росту напряженности электрического поля и, соответственно, потерь активной мощности на коронирование. Коронный разряд вызывает помехи на радио- и телевизионный прием, коррозию поверхности проводов ВЛ.
Для снижения потерь на корону до экономически приемлемого уровня правилами устройства электроустановок (ПУЭ) установлены минимальные сечения (диаметры) проводов. Например, для ВЛ 110 кВ — АС 70 (11,8 мм), для ВЛ 220 кВ — АС 240 (21,6 мм).
В технико-экономических расчетах, связанных с учетом стоимости потерь электроэнергии, потери на коронирование следует учитывать в ВЛ начиная с напряжения 220 кВ, диэлектрические потери в КЛ – с 35 кВ.
В КЛ под влиянием наибольшей напряженности находятся слои поясной изоляции у поверхности жил кабеля. Чем выше рабочее напряжение кабеля, тем заметнее токи утечки через материал изоляции и нарушение ее диэлектрических свойств. Последние характеризуются тангенсом угла диэлектрических потерь tg8, принимаемым по данным завода-изготовителя.
Активная проводимость кабеля на единицу длины, соответствующий ток утечки в изоляции кабеля и диэлектрические потери в материале изоляции КЛ следует учитывать для КЛ с номинальным напряжением 110 кВ и выше.
Пояснения к схемам замещения
П ри
расчете симметричных установившихся
режимов электрической системы схем
замещения составляют для одной фазы.
ри
расчете симметричных установившихся
режимов электрической системы схем
замещения составляют для одной фазы.
При расчетах можно не учитывать какие-либо параметры, если их влияние на работу сети несущественно.
В ВЛ до 220 кВ потери мощности на корону, а в КЛ до 35 кВ диэлектрические потери незначительны. Поэтому ими пренебрегают и соответственно принимают равной нулю активную проводимость (см. схему замещения выше).
Необходимость учета емкости и зарядной мощности зависит от соизмеримости зарядной и нагрузочной мощности (доля свыше 10 % подлежит учету).
В проводах ВЛ при малых сечениях (16-35 мм2) преобладают активные сопротивления, а при больших сечениях свойства сетей определяются их индуктивностями. Активные и индуктивные сопротивления средних сечений (50-185 мм2) близки друг к другу. В КЛ до 10 кВ небольших сечений (50 и менее) определяющим является активное сопротивление, в таком случае индуктивные могут не учитываться.
Необходимость учета индуктивных сопротивлений зависит также от доли реактивной составляющей тока в общей электрической нагрузке. При анализе электрических режимов с низкими коэффициентами мощности (менее 0,8) индуктивные сопротивления КЛ необходимо учитывать. В противном случае возможны ошибки, приводящие к уменьшению действительной величины потери напряжения.
Учет параметров линий электропередачи
|
Воздушные линии |
Кабельные линии |
||||||
|
до 35 кВ включительно |
110 кВ |
220 кВ и выше |
до 10 кВ небольших сечений (до 50 мм2) |
до 35 кВ (6 – 20) |
35 кВ |
110 кВ |
более 110 кВ |
Активное сопротивление |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
Индуктивное сопротивление |
+ |
+ |
+ |
– |
+ |
+ |
+ |
+ |
Емкостная проводимость или зарядная мощность |
– |
+ |
+ |
– |
– |
+ |
+ |
+ |
Потери мощности на коронирование |
– |
– |
+ |
– |
– |
– |
– |
– |
Диэлектрические потери вследствие тока утечки через изоляцию |
– |
– |
– |
– |
– |
+ |
+ |
+ |
Электрический расчет линий электропередачи
(Князевский Б.А., Липкин Б.Ю. Электроснабжений промышленных предприятий. – М.: Высш. шк., 1986. 400 с.)
В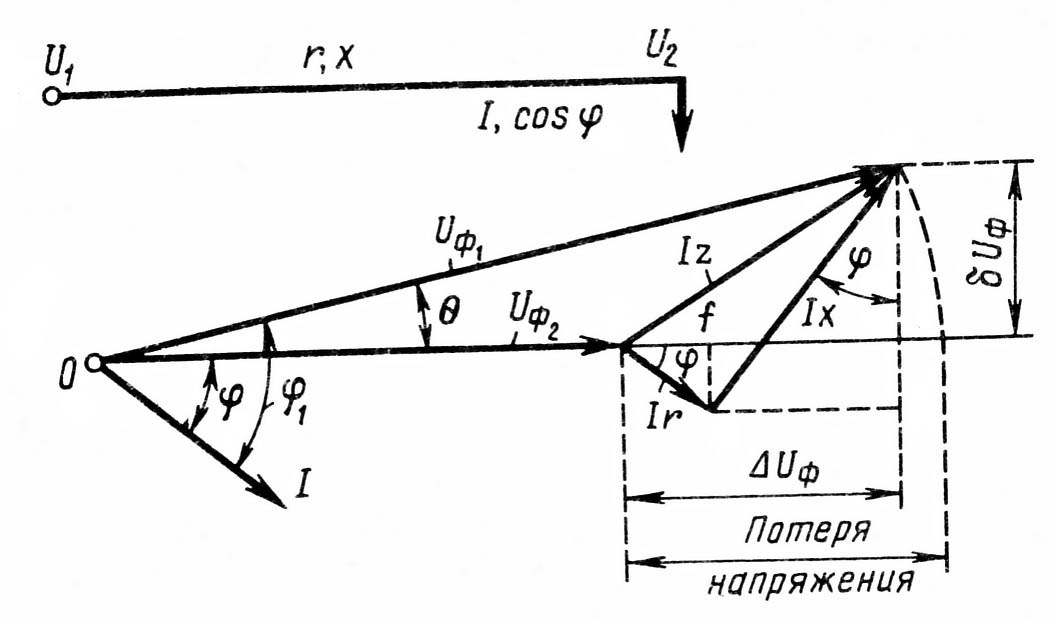 екторная
диаграмма для одного провода трехфазной
линии, обладающей индуктивным
сопротивлением и питающей индуктивную
нагрузку на конце линии:
екторная
диаграмма для одного провода трехфазной
линии, обладающей индуктивным
сопротивлением и питающей индуктивную
нагрузку на конце линии:
Uф2 – фазное напряжение в конце линии. Вектор тока отложен под углом φ, соответствующим cos φ нагрузки.
![]() ,
,
где ΔUф = Iz – падение напряжения на сопротивлении линии электропередачи.
Падение напряжения (вектор) на активном сопротивлении Ir совпадает с направлением тока. Падение напряжения на индуктивности опережает вектор тока на 90 градусов. Ir + Ix = Iz – вектора.
Проекция вектора Iz на горизонтальную ось – продольная составляющая падения напряжения или потеря напряжения. Учитывается при выборе сечений проводов линий напряжением до 35 кВ.
![]() .
.
Линейная потеря напряжения при этом определяется из соотношения между линейными и фазными напряжениями:
![]() .
.
С учетом выражений
![]()
![]() .
.
Для линий напряжением выше 35 кВ учитывается поперечная составляющая падения напряжения δUф, численно равная разности проекций векторов Ix и Ir на вертикальную ось:
![]() .
.
Из векторной диаграммы следует, что поперечная составляющая определяется углом сдвига фаз θ между напряжениями в начале и конце линии.
Линейные напряжения в начале и конце линии:
![]() ;
;
![]() ,
,
где P1, Q1, P2, Q2 – соответственно мощности в начале и конце линии,
r, x – активное и реактивное сопротивление линии.
Схемы замещения трансформаторов
(Герасименко А.А., Федин В.Т. Передача и распределение электрической энергии)
При расчетах режимов трехфазных электрических сетей с равномерной загрузкой фаз трансформаторы в расчетных схемах представляются схемой замещения для одной фазы.
Обмотки трансформатора расположены на общем магнитопроводе. Поэтому схема состоит из контуров первичной и вторичной обмоток, связанных взаимной индукцией (рис. 12). Наличие магнитной связи между обмотками затрудняет исследование режимов работы трансформатора и электрической сети в целом. Поэтому в расчетах магнитная связь заменяется на электрическую.
Т-образная схема неудобна (содержит два контура). Поэтому используют Г-образную схему замещения.
С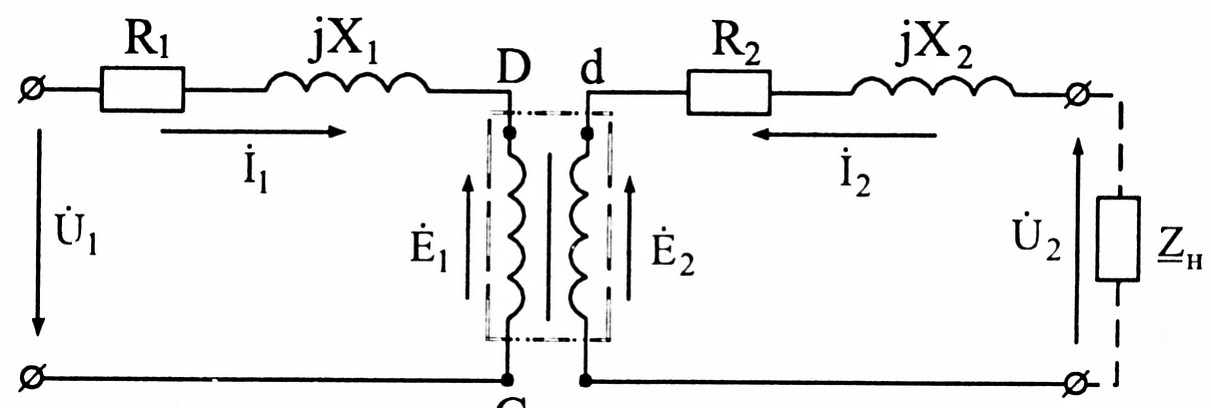
 хема
замещения отдельных обмоток
хема
замещения отдельных обмоток
С хема
замещения обмоток приведенного
трансформатора
хема
замещения обмоток приведенного
трансформатора
Т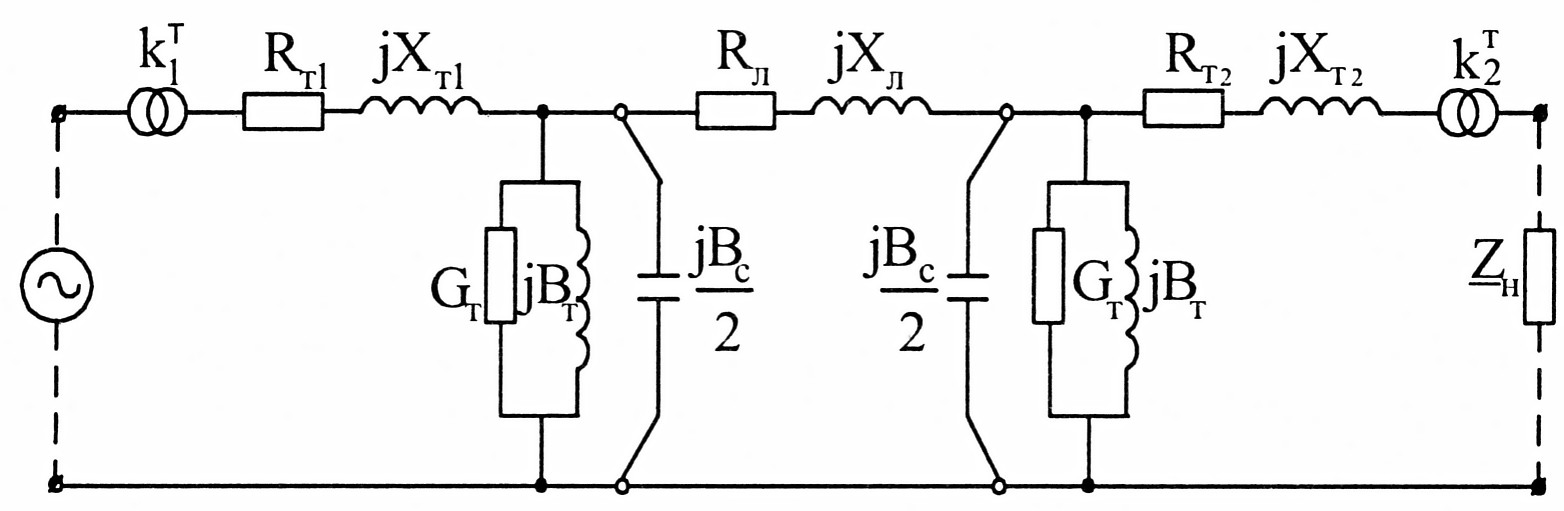 -образная
схема замещения
-образная
схема замещения
Схема замещения линии электропередачи
с прямой и обратной Г-образными схемами замещения соответственно
понижающего и повышающего трансформаторов
Активная проводимость Gт обусловлена потерями активной мощности в стали трансформатора на перемагничивание и вихревые токи, реактивная проводимость Вт – мощностью намагничивания стали. Поскольку наличие этих проводимостей связано с токами холостого хода Iх (в основном намагничивающего тока), в приближенных расчетах в Г-образной схеме замещения проводимость трансформатора заменяют неизменной нагрузкой (потери мощности холостого хода трансформатора)
![]() ,
,
где ∆Рх – потери активной мощности в стали трансформатора, является паспортной величиной;
∆Qx – намагничивающая мощность трансформатора:
![]() ,
,
где Ix% – ток холостого хода трансформатора, является паспортной величиной;
Sном – номинальная мощность трансформатора.
Использование схемы замещения, где проводимость (ветвь намагничивания) заменена мощностью потерь холостого хода, допустимо при напряжении до 220 кВ включительно.
При расчетах местных (распределительных) сетей 6-35 кВ влиянием проводимостей трансформаторов пренебрегают и используют простейшую схему замещения из последовательно соединенных активного и индуктивного сопротивлений.
В технико-экономических расчетах, связанных с расчетом и анализом потерь электроэнергии в распределительных сетях, потери мощности холостого хода необходимо учитывать, т. к. они соизмеримы с нагрузочными.
Активные и реактивные сопротивления одной фазы трансформатора определяют по результатам опыта короткого замыкания. Коротким замыканием называется режим работы трансформатора, при котором первичная обмотка присоединена к сети, а выводы вторичной обмотки соединены накоротко (U2 = 0). Короткое замыкание при номинальном первичном напряжении является аварийным режимом, при котором токи в обмотках превышают номинальные в 10-15 раз, и опасно для трансформатора.
Опыт короткого замыкания проводится по соответствующей схеме. Напряжение, подводимое к трансформатору, плавно повышается от нуля до значения, при котором токи в обеих обмотках трансформатора равны номинальным. Это и есть напряжение короткого замыкания uк, и обычно оно выражается в процентах номинального напряжения:
![]()
и составляет для силовых трансформаторов около 3-13 %.
Потери в стали незначительны из-за малости приложенного напряжения, все потери активной мощности практически целиком расходуются на нагрев его обмоток и могут быть приравнены к номинальным потерям в обмотках трансформатора ∆Рк ≈ ∆Рном. Получаем
 .
.
Индуктивное сопротивление трансформатора определяется напряжением короткого замыкания. Полное сопротивление трансформатора, Ом:
![]() .
.
Реактивное сопротивление обмоток трансформатора
![]() .
.
Для мощных трансформаторов (выше 1000 кВА) индуктивное сопротивление значительно больше активного, поэтому можно принять
![]() .
.
Проводимости схемы замещения трансформатора определяют по результатам опыта холостого хода.
К первичной обмотке (при разомкнутой вторичной) подводится номинальное напряжение. Показания ваттметра W определяют суммарные потери активной мощности в первичной обмотке и стальном магнитопроводе трансформатора. Так как ток холостого хода очень мал (составляет от 0,7 до 3,0 % номинального значения), потери мощности в активном сопротивлении первичной обмотки незначительны. Применяя Г-образную схему замещения, все потери холостого хода как бы переносят в стальной сердечник, а потери в стали с небольшой погрешностью приравнивают к общим потерям холостого хода: ∆Рст ≈ ∆Рх. Для одной фазы трансформатора
![]() .
.
Отсюда, переходя к параметрам трехфазного трансформатора, получаем
![]() .
.
Так как потери мощности холостого хода измеряют в киловаттах, напряжение UH0M в киловольтах, формула приобретает следующий вид (Gт в Ом-1):
![]() .
.
Активная составляющая тока холостого хода, отражающая потери в стальном магнитопроводе, меньше реактивной в 5—7 раз.
Реактивная проводимость ветви намагничивания трансформатора, См, определяется аналогично:
![]()
где Iх — ток холостого хода, %;
SH0M — номинальная мощность трансформатора, кВА.
В расчетных выражениях сопротивлений и проводимостей номинальные напряжения принимают в соответствии с тем, к какому напряжению (высшему или низшему) необходимо привести параметры схемы замещения трансформатора. При расчете режимов электрических сетей за расчетное напряжение принимают номинальное напряжение той обмотки трансформатора, которая непосредственно присоединена к линии.
Номинальные величины мощности SH0M, потерь мощности ΔРК, ΔРХ, напряжений UH0M, uK, и тока Iх даны в паспорте трансформатора: для однофазного — фазными значениями, для трехфазного — суммарной мощностью трех фаз, междуфазовыми напряжениями и фазным значением тока.
Задача. Выполнить электрический расчет высоковольтной ЛЭП напряжением 110 кВ, длиной 65 км, предназначенной для электроснабжения предприятия, имеющего 50 % потребителей первой категории.
Нагрузка: Рмакс = 27 МВт;
cos φ = 0,8;
Тмакс = 4000 ч – число часов использования максимума нагрузки в год;
U4 = 6,3 кВ – напряжение на шинах подст предприятия для внутреннего электроснабжения.
Источник питания: электростанция с напряжением на генераторах 10,5 кВ.
Решение.
1 )
расчет сечения проводов ЛЭП:
)
расчет сечения проводов ЛЭП:
расчетный ток
![]() ;
;
![]()
экономическое сечение проводов ЛЭП соответствует минимальным затратам.
С увеличением сечения вырастают затраты на сооружение линии, отчисления на амортизацию, ремонт и обслуживание З1, но снижаются потери мощности и электроэнергии и связанные с ними затраты З2:
-

Зависимость приведенных затрат от сечения
Из рисунка видно, что существует точка, в которой З1=З2 и суммарные затраты будут минимальны. Этой точке соответствует сечение, которое называют экономическим сечением:
![]() ,
,
где jэк – нормированное значение экономической плотности тока, его величина зависит от числа часов использования максимума нагрузки в год, от типа изоляции провода и материала токопроводящей жилы;
для неизолированных медных проводов (от 3000 до 5000 ч/год) – 1,1 А/мм2.
![]() .
.
Для потребителей 1-й категории применяем двухцепную линию с проводами АС-95, для которой допустимый ток нагрузки составляет 330 А.
2) выбор мощности трансформаторов:
– повысительной подстанции – с предварительным учетом потерь мощности в линии (5 %):
![]() ,
,
![]() .
.
С учетом роста нагрузки и регулирования напряжения принимаем два трансформатора типа ТРДН мощностью по 25000 кВА (25 МВА) напряжением 10,5/121 кВ.
Т – трехфазный,
Р – расщепленная обмотка низкого напряжения,
Д – дутье – принудительная циркуляция воздуха и естественная циркуляция масла,
Н – оборудован устройством РПН (регулирование напряжения под нагрузкой).
Паспортные данные ТРДН 25000/ 10,5/121 кВ:
Рхх = 36 кВт,
Рк = 120 кВт,
i0 (Iхх) = 0,85 %,
uк = 10,5 %.
– понизительной (на предприятии) подстанции: с учетом возможной перегрузки в часы максимума принимаем два трансформатора ТДН-16000/115/6,3.
Рхх = 26 кВт,
Рк = 85 кВт,
i0 (Iхх) = 0,85 %,
uк = 10,5 %.
3) составление схемы замещения и расчет ее параметров (схема приведена в однолинейном исполнении, учет двух цепей будет произведен при расчете сопротивлений схемы):
П ри
электрическом расчете линии схему
внешнего электроснабжения представляют
в виде трех звеньев: 1 и 3 – повышающий
и понижающий трансформаторы, звено 2
соответствует ЛЭП внешнего электроснабжения
предприятия.
ри
электрическом расчете линии схему
внешнего электроснабжения представляют
в виде трех звеньев: 1 и 3 – повышающий
и понижающий трансформаторы, звено 2
соответствует ЛЭП внешнего электроснабжения
предприятия.
U1 и U4 – напряжения соответственно в начале и конце линии;
Р4 и Q4 – активная и реактивная мощности нагрузки;
R12, X12, R34, X34 – активные и реактивные сопротивления обмоток трансформаторов повысительной и понизительной подстанций соответственно.
Данные для АС-95:
r0 = 0,33 Ом/км;
х0 = 0,4 Ом/км;
b0 = 2,74·10-6 Ом-1/км. Тогда
![]() ,
,
![]() .
.
![]() ,
,
![]() .
.
![]() ,
,
![]() .
.
Определяем активные и реактивные сопротивления обмоток трансформаторов повысительной и понизительной подстанций:
 ,
,
![]() ,
,
![]() ;
;
![]() ,
,
![]() ;
;
![]() .
.
Определяем реактивную мощность холостого хода n трансформаторов:
![]() ,
,
![]() ,
,
![]() .
.
4) расчет ЛЭП по звеньям.
Третье звено. По условию, активная мощность потребителя в конце звена
P4 = 27 МВт, cosφ = 0,8. Тогда реактивная мощность Q4 = P4 tgφ, Q4 = 27·0,75 = 20,2 МВАр. Потери мощности в звене
![]() ,
,
 ,
,
 ;
;
![]() ,
,
![]() .
.
Потери напряжения в звене
![]() ,
,
![]() ;
;
![]() ,
,
![]() .
.
Мощности и напряжения в начале третьего звена
![]() ,
,
![]() ;
;
![]() ,
,
![]() .
.
![]() ,
,
![]() .
.
Второе и первое звенья. Рассчитывают аналогично третьему звену с определением передаваемых активных и реактивных мощностей в конце и в начале звеньев.
Имитационное моделирование
Имитационное моделирование является относительно новым и быстро развивающимся методом исследования поведения систем электроснабжения. Этот метод состоит в том, что с помощью ЭВМ воспроизводится поведение исследуемой системы управления; иначе говоря, имитация – это численный метод проведения на ЭВМ экспериментов с математическими моделями, описывающими поведение системы управления для определения интересующих нас характеристик. Появление имитационного моделирования и его развитие обусловлено:
– потребностями практики (анализ сложных систем);
– развитием метода статистических испытаний (метода Монте-Карло): возможность моделирования случайных факторов, которые имеют место в реальных системах;
– развитие электронно-вычислительной техники, являющейся базой для проведения статистических экспериментов.
Преимущества:
– наличие множества случайных факторов сложной системы делает невозможным применение аналитических методов исследования, в результате имитационное моделирование оказывается единственным способом исследования;
– наблюдение за поведением системы в таких условиях, в которых натурный эксперимент просто невозможен; проведение имитационных экспериментов в широком диапазоне изменения параметров системы и внешней среды;
– детальное наблюдение за поведением имитируемой системы позволяет лучше понять содержание самой системы и разработать такие предложения по ее совершенствованию, которые были бы невозможны без имитации;
– позволяет дать представление о том, какие из параметров системы являются наиболее существенными;
Недостатки:
– в ряде случаев имитационные модели оказываются достаточно сложными, что требует больших затрат ресурсов на программирование, отладку моделей и проведение экспериментов;
– "имитационный мир", как и реальная действительность, оказывается трудно постижимым, ибо сложная имитационная модель приводит к большому числу разнообразных исходов, в результате возникаю трудности с интерпретацией полученной информации;
– анализ результатов имитации основан только на использовании математической статистики; для получения достоверных результатов требуется многократное повторение имитационных экспериментов, что влечет большие временные затраты;
– не разработаны принципы построения моделей для широкого класса систем управления, поэтому каждый конкретный случай требует специальной проработки.
При имитационном моделировании на ЭВМ можно выделить основные этапы:
– формулировка проблемы;
– построение математической модели функционирования системы;
– составление и отладка программы для ЭВМ, включая и разработку процедур моделирования различных случайных факторов;
– планирование имитационных экспериментов;
– проведение экспериментов и обработка результатов исследования.
Так как имитация основывается на математической модели, можно выделить два вида классификации имитационных подходов:
1) статическая или динамическая;
2) детерминистическая или стохастическая.
Статическая имитация – эксперименты проводятся на модели, элементы и параметры которой не зависят от времени. Динамическая имитация включает параметры, которые изменяются во времени. При детерминистической имитации переменные и параметры фиксированы и известны точно, при стохастической – некоторым или всем параметрам и переменным соответствуют вероятностные распределения.
Широкому внедрению имитационного моделирования на практике препятствует необходимость создания программных реализаций имитационных моделей. В отличие от традиционных методов программирования разработка имитационной модели требует перестройки принципов мышления. Принципы, положенные в основу имитационного моделирования, дали толчок к развитию объектного программирования. Основное назначение программных средств имитации – уменьшение трудоемкости создания программных реализаций имитационных моделей и экспериментирования с моделями.
Один из первых языков моделирования, облегчающих процесс написания имитационных программ, – язык GPSS, созданный в виде конечного продукта Джеффри Гордоном в фирме IBM в 1962 г. Этот язык в свое время входил в первую десятку лучших языков программирования, опережая транслятор с языка АЛГОЛ, и был реализован практически на всех типах ЭВМ. Изучение этого языка и создания моделей позволяет понять принципы разработки имитационных программ и научиться работать с имитационными моделями.
GPSS (General Purpose Simulation System – система моделирования общего назначения) – язык моделирования, который используется для построения событийных дискретных имитационных моделей и проведения экспериментов на ЭВМ.
Модели систем на GPSS могут быть записаны в виде блок-схем или представлены в виде последовательности строк программы, эквивалентных блок-схеме. Блоки – это подпрограммы, реализованные средствами макроассемблера. Имеются специальные средства для описания динамического поведения систем через изменение состояний в дискретные моменты времени, то есть время моделирования изменяется случайно от события к событию.
Значительное место в имитационном моделировании занимают системы массового обслуживания (СМО). С системами массового обслуживания мы встречаемся повседневно (очередь в магазине, пользование телефонной связью, выполнение программы на компьютере). Любое производство можно представить как последовательность систем обслуживания.
Особое значение приобрели такие системы при изучении процессов в информатике. Это компьютерные системы, сети передачи информации. Опыт моделирования разных типов дискретных событийных систем говорит о том, что около 80 % этих моделей основаны на СМО.
Система может характеризоваться как СМО, если заданы:
1) входящий поток требований или заявок, которые поступают на обслуживание;
2) дисциплина постановки в очередь и выбор из нее;
3) правило, по которому осуществляется обслуживание;
4) выходящий поток требований;
5) режимы работы.