

20.3. Электропривод и электрооборудование компрессорных и вентиляторных установок
Режим работы компрессора — длительный, с постоянной нагрузкой. Компрессоры обычно пускаются в ход вхолостую, что достигается отжатием всасывающих клапанов или открытием выхлопной задвижки, поэтому пусковой момент небольшой.
Для привода стационарных компрессоров применяют синхронные и асинхронные (с фазным ротором) двигатели, а для передвижных компрессоров небольшой производительности, при мощности менее 100 кВт — асинхронные двигатели с коротко-замкнутым ротором.
Управление двигателями компрессоров осуществляется с помощью магнитных пускателей, контакторов, автоматов, комплектной аппаратуры РВН-6, ВЯП-6 и др.
В настоящее время для управления стационарными компрессорными установками с любым количеством компрессоров производительностью от 10 до 100 м3/мин применяются типовые комплектные устройства автоматического управления.
Автоматическое управление компрессорными установками осуществляется с помощью станций и пультов управления, на которых монтируется аппаратура управления электродвигателями и контроля необходимых параметров в автоматическом, полуавтоматическом и ручном режимах управления.
Стационарные вентиляторные установки монтируются на поверхности шахты в машинных зданиях. Это позволяет применять двигатели открытого исполнения.
Режим работы вентиляторов — длительный, с постоянной мощностью на валу и редкими пусками и остановками.
Для привода вентиляторов в зависимости от потребной мощности применяют электродвигатели следующих типов: асинхронные (низковольтные и высоковольтные) с короткозамкнутым и с фазным ротором и синхронные высоковольтные.
Для управления двигателем вентилятора применяются магнитные пускатели и контакторы, реле защиты и управления, высоковольтные распределительные устройства ЯКНО-6, РВНО-6, ВЯП-6 и КРУ-Ю.
Шахтные вентиляторные установки, как правило, имеют дистанционно-автоматическое управление.
В настоящее время разработаны и выпускаются промышленностью комплекты аппаратуры для действующих вентиляторных установок с осевыми и центробежными вентиляторами, для реверсивных осевых вентиляторов типа ВОКР и для вновь строящихся вентиляторных установок.
20.4. Электропривод и электрооборудование подъемных установок
Режим работы электродвигателя подъемной машины — повторно-кратковременный, с меняющимися вращающим моментом и скоростью вращения, с частыми пусками, остановками и реверсированием.
Для подъемных машин применяют электропривод переменного тока с трехфазными асинхронными двигателями с фазным ротором, электропривод постоянного тока по системе генератор—двигатель (Г—Д) и тиристорный преобразователь—двигатель (ТП—Д). Наибольшее распространение имеет электропривод переменного тока в силу ряда преимуществ по сравнению с приводом постоянного тока (простота конструкции двигателя, меньшее количество электрических машин, относительно высокий к. п. д., возможность размещения на меньшей площади и т. д.).
Привод постоянного тока применяется для подъемных машин с двигателями большой мощности (свыше 1000 кВт) или при больших (свыше 10 м/с) скоростях подъема (безредуктор-ный привод).
Для управления двигателем подъемной машины помимо обычной аппаратуры управления (магнитных контакторов), реле управления и защиты, контроллеров, командоконтроллеров и т. п. применяют воздушные реверсоры, ограничители скорости, реостаты и другую специальную аппаратуру управления, контроля и защиты.
Станции и пульты управления выпускаются заводами в смонтированном виде, поэтому на месте монтажа их только устанавливают и присоединяют к соответствующим зажимам жилы подходящих и отходящих кабелей.
Управление подъемными машинами может быть ручное, полуавтоматическое, автоматическое и дистанционное.
При ручном управлении заданная диаграмма скорости выполняется полностью машинистом с помощью контроллера, производящего переключения в силовых цепях двигателя. При полуавтоматическом управлении машинист оттормаживает машину и при помощи аппарата управления дает импульс на включение подъемного двигателя. Заданный режим пуска выполняется автоматически специальной релейно-контакторной аппаратурой.
При автоматическом управлении выполнение заданного режима работы обеспечивается системой автоматического управления. В некоторых случаях применяется дистанционное управление подъемной машиной с приемной площадки или из клети (при спуске и подъеме людей).
Наиболее важной частью системы автоматического управления является система автоматического регулирования скорости движения подъемной машиной в соответствии с заданной диаграммой скорости, рабочий цикл подъема состоит из трех основных периодов: разгона машины, движения с равномерной скоростью и замедления машины.
В период разгона не требуется большой точности в отношении величины пройденного пути подъемным сосудом и времени разгона. Поэтому период разгона легко автоматизируется с помощью обычной релейно-контакторной системы в функции времени с дополнительной корректировкой по току.
В период равномерного хода машины регулирование не требуется, так как асинхронный двигатель работает в этот период на естественной характеристике, обладающей достаточной жесткостью, и отклонение действительной скорости от заданной практически незначительно при изменении нагрузки на валу двигателя в широких пределах.
В период же замедления машины необходимо выдерживать замедление в допустимых пределах (особенно для клетевых подъемов) и независимо от величины поднимаемого груза обеспечить остановку подъемного сосуда у приемной площадки с достаточной точностью (для скиповых подъемов ±100 мм, для клетевых— ±25 мм).
Поэтому для точного выполнения диаграммы скорости в период замедления применяются специальные системы автоматического регулирования, за которыми для подъемных установок закрепилось название — регуляторы хода. В отличие от ограничителя скорости, который при недопустимом отклонении действительной скорости от заданной отключает машину и включает аварийный тормоз, регулятор хода контролирует действительную скорость подъема, сравнивает ее с заданной и автоматически регулирует скорость, не останавливая машины.
В настоящее время наибольшее распространение получили электрические регуляторы хода, воздействующие на электрические средства динамического торможения подъемного двигателя.
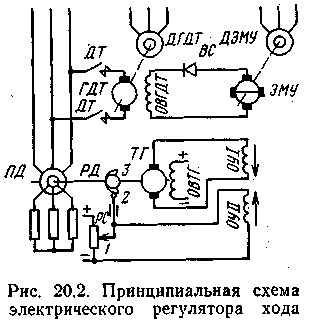
На рис. 20.2 приведена принципиальная схема электрического регулятора хода.
В регуляторе хода элементом, контролирующим действительную скорость, является тахогенератор ТГ, приводимый во вращение от вала подъемного двигателя ПД. Элементом, контролирующим заданную скорость в зависимости от пройденного сосудом пути, является потенциометр PC. Положение движка / потенциометра PC определяется профилем кулака 2, установленного на диске 3 указателя глубины. Напряжения, снимаемые с тахогенератора ТГ и потенциометра PC, соответственно подаются на обмотки ОУ1 и ОУП электромашинного усилителя ЭМУ. Фактическая и заданная скорости сравниваются между собой в виде магнитных потоков обмоток управления ОУ1 и ОУП.
Магнитные потоки, создаваемые обмотками управления, направлены навстречу друг другу. При равенстве фактической и заданной скоростей результирующий магнитный поток обмоток равен нулю и, следовательно, напряжение и ток на выходе ЭМУ также равны нулю.
Если фактическая скорость будет выше заданной, то на выходе ЭМУ появится напряжение и по обмотке возбуждения генератора динамического торможения ОВГДТ потечет ток.
В результате в обмотке статора подъемного двигателя будет протекать постоянный ток, пропорциональный отклонению фактической скорости от заданной, и создается тормозной момент, снижающий скорость движения подъемной машины и уменьшающий тем самым величину отклонения скорости.
Для исключения возможности торможения машины в случае, когда фактическая скорость оказывается меньше заданной, в цепи обмотки возбуждения генератора динамического торможения предусматривается вентиль ВС, пропускающий ток только в направлении, соответствующем превышению фактической скорости над заданной.