

16.3. Электропривод и схемы управления электроприводами
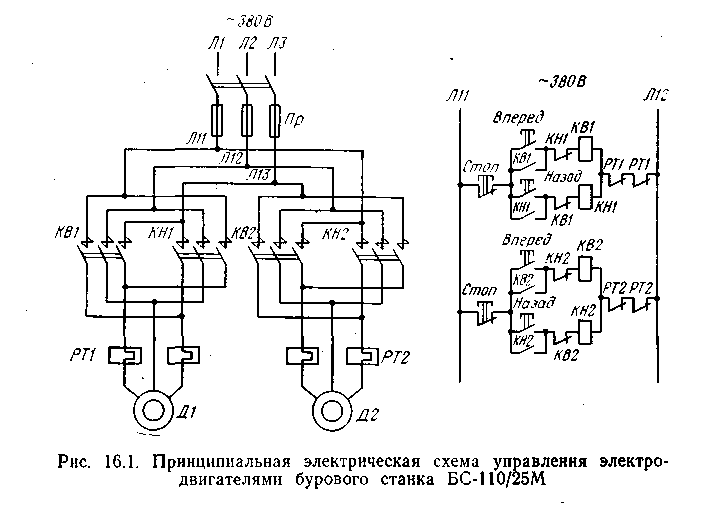
Шнековые станки. Наиболее простыми схемами электрооборудования являются схемы шнековых станков вращательного бурения (БС-110/25М, СВБ-25М и др.). Как правило, на них устанавливают два асинхронных двигателя с к. з. ротором: один для вращения бурового става, другой для механизмов хода и подъема бурового става. Управление электродвигателями бурового станка БС-110/25М (рис. 16.1) осуществляется с помощью реверсивных магнитных пускателей общепромышленного исполнения типа П и трехкнопочных постов. Для защиты двигателей от перегрузок применены тепловые реле РТ, встроенные в каждый реверсивный пускатель, а от токов к. з. — плавкие предохранители.
Аналогично осуществляется управление электродвигателями станка СВБ-2М.
Станки шарошечного бурения. Схемы управления электроприводами станков шарошечного бурения значительно сложнее схем управления электроприводами шнековых станков из-за большого числа двигателей и применения на приводе вращателя системы Г—Д.
Так, например, на станке 2СБШ-200 установлено 10 двигателей общей мощностью 130 кВт; на станке СБШ-250—12 двигателей общей мощностью 295 кВт.
Для примера рассмотрим привод вращателя станка 2СБШ-200 по системе Г—Д с ЭМУ (рис. 16.2). Привод имеет двигатель Д постоянного тока мощностью 50 кВт. Для питания двигателя вращателя и цепей управления служит трехмашин-ный преобразовательный агрегат, состоящий из генератора Г с независимым возбуждением, возбудителя В и приводного асинхронного двигателя (на рисунке не показан). Питание обмотки возбуждения генератора ОВГ осуществляется от электромашинного усилителя ЭМУ.
Электрическое регулирование частоты вращения двигателя вращателя при постоянном моменте может осуществляться в пределах 180—900 об/мин. Обмотка электромашинного усилителя ЭМУ-3 является задающей и включена на постоянное напряжение через контакты линейного Л и реверсивных В и Я контакторов. В цепи этой обмотки имеется установочное сопротивление С14, ограничивающее ток в обмотке ЭМУ-3 до величины, при которой частота вращения двигателя Д равна 900 об/мин. Обмотка ЭМУ-1 представляет собой обмотку жесткой отрицательной связи по частоте вращения двигателя Д;
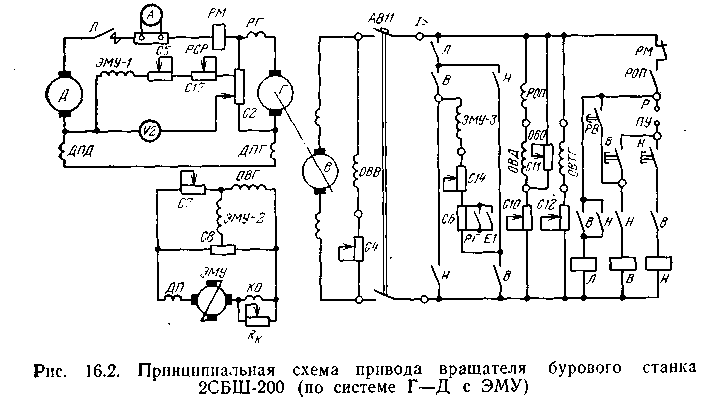
она включена в диагональ тахометрического моста, плечами которого являются обмотка якоря двигателя, обмотки дополнительных полюсов двигателя и генератора и участки сопротивлений потенциометра С2. Регулирование частоты вращения двигателя вращателя производится с помощью регулятора РСР (сопротивление С17), включенного в цепь обмотки ЭМУ-1. С увеличением сопротивления СП обратная связь ослабляется и частота вращения двигателя увеличивается. При уменьшении сопротивления происходит обратное. Для повышения устойчивости системы управления приводом применена гибкая обратная связь с использованием обмотки ЭМУ-2, которая включена в диагональ динамического моста. Плечами этого моста являются обмотка возбуждения генератора ОВГ, сопротивление С7 и участки сопротивлений потенциометра С8.
Ограничение пиков тока при пуске и торможении двигателя вращателя осуществляется с помощью вибрационного токового реле РГ, которое имеет ток срабатывания, равный 1,6 Iном , и ток возврата, равный 0,7 Iном При срабатывании реле.(при Iср= 1,6 /ном) контакт реле РГ размыкается и в цепь задающей обмотки ЭМУ-3 вводится сопротивление Сб. Это ведет к снижению тока в обмотке ЭМУ-3 и напряжения на генераторе, а следовательно, к снижению тока в главной цепи. При снижении тока в главной цепи двигателя вращателя до 0,7 /ном размыкающий контакт РГ замкнется и зашунтирует сопротивление Сб. Напряжение генератора и ток в главной цепи привода при этом вновь возрастут. В схеме привода имеется максимальная токовая защита РМ и защита от обрыва поля двигателя РОП.
Принципиальные схемы приводов механизмов хода, компрессоров, маслонасосов, вентиляторов и других вспомогательных механизмов и установок станка 2СБШ-200 включают магнитные пускатели с максимальной и тепловой защитой аналогично приведенной выше схеме шнековых станков. Для обогрева кабины и подогрева масла в гидросистеме и системе компрессоров установлены трубчатые нагреватели различных типов.
16.4. Питание буровых станков и агрегатов
Питание электроэнергией буровых станков осуществляется от распределительных внутрикарьерных ЛЭП напряжением 6 кВ или от передвижных трансформаторных подстанций напряжением 380 (660) В. Подвод электроэнергии к станкам выполняют с помощью четырехжильных гибких кабелей. Длина гибких кабелей обычно не превышает 100 м.
В качестве примера рассмотрим питание электрооборудования станка СБШ-320. Питание осуществляется от карьерной трансформаторной подстанции напряжением 380 В двумя гибкими шланговыми кабелями марки КРШК 3X120+1X35. Кабели подключаются к двум кабельным барабанам. С токосъемников барабанов напряжение подается в шкаф управления на вводный автоматический выключатель. При перегонах станка на большие расстояния кабели отключаются от подстанции и наматываются на барабаны. При этом питание двигателей привода хода осуществляется кабелем марки КРПТ 3X25+1X10, подключаемым к распределительному ящику, установленному на раме привода хода.
Для проверки правильности чередования фаз при подключении станка на пульте управления установлен фазоуказатель. Управление технологическими и вспомогательными операциями осуществляется с двух пультов, установленных в кабине машиниста.