

Глава 19
ЭЛЕКТРОПРИВОД И ЭЛЕКТРООБОРУДОВАНИЕ УСТАНОВОК ГИДРОМЕХАНИЗАЦИИ
Основными установками гидромеханизации являются насосные станции, землесосы, гидромониторы, напорный гидротранспорт и плавучие землесосные снаряды. Работа механизмов гидромеханизации связана с водой, вследствие чего их электрооборудование постоянно подвергается воздействию брызг и сырого воздуха. Поэтому в условиях гидромеханизации горных работ должны применяться электродвигатели закрытого исполнения, защищенные от попадания в них воды и имеющие влагостойкую изоляцию.
Режим работы двигателей насосных и землесосных установок длительный с постоянной нагрузкой. Для привода насосных установок наибольшее применение находят асинхронные двигатели, реже применяются синхронные. Это объясняется тем, что асинхронные двигатели проще по конструкции и позволяют применять несложные схемы управления.
Управление агрегатами гидромеханизации может быть значительно облегчено и упрощено путем применения средств автоматизации. К числу таких агрегатов, автоматизация управления которых возможна и целесообразна, в первую очередь относятся насосные агрегаты.
Автоматизация управления насосными установками, работающими на чистой воде и предназначенными для питания гидромониторов, несложна и сводится к автоматическому запуску и контролю работы агрегата
Наряду с автоматизацией насосных станций в гидромеханизации очень важно, а в условиях горных работ и часто необходимо дистанционное управление насосами (землесосами) и гидромониторами. Такое управление позволяет из одного пункта регулировать работу насосной установки или гидромонитора.
Более сложна схема автоматического управления землесосными установками, которые применяются при напорном гидротранспорте и на плавучих землесосных снарядах.
Усложнение схемы диктуется здесь требованием регулировать режим работы землесоса при изменении консистенции пульпы и необходимость промывки трубопровода перед остановкой агрегата во избежание заиливания последнего.
В установках гидромеханизации помимо насосных и землесосных установок применяется ряд вспомогательных механизмов, служащих для обеспечения нормальной работы этих установок. К их числу можно отнести вспомогательные насосы, задвижки, лебедки и т. д. В качестве электропривода вспомогательных механизмов, как правило, применяются трехфазные асинхронные двигатели с короткозамкнутым ротором.
Роль некоторых вспомогательных механизмов установок гидромеханизации очень важна. Примером могут служить папильонажные лебедки земснаряда.
Работа папильонажных лебедок характеризуется тем, что для изменения скорости перемещения грунтозаборного устройства в зависимости от условий работы земснаряда скорость намотки — травления папильонажных тросов должна изменяться в широких пределах (от 1—2 до 20—30 м/мин). Кроме того, при автоматизации земснаряда рационально использовать папильонажные лебедки, точнее, их привод в качестве объекта автоматического регулирования для системы, в которой консистенция пульпы регулируется изменением скорости папильонирования. В этом случае необходимо иметь достаточную плавность изменения скорости лебедок во всем диапазоне, а также достаточную жесткость механических характеристик привода.
 В
настоящее время в приводе папильонажных
лебедок широко применяется многоскоростной
асинхронный электродвигатель.
В
настоящее время в приводе папильонажных
лебедок широко применяется многоскоростной
асинхронный электродвигатель.
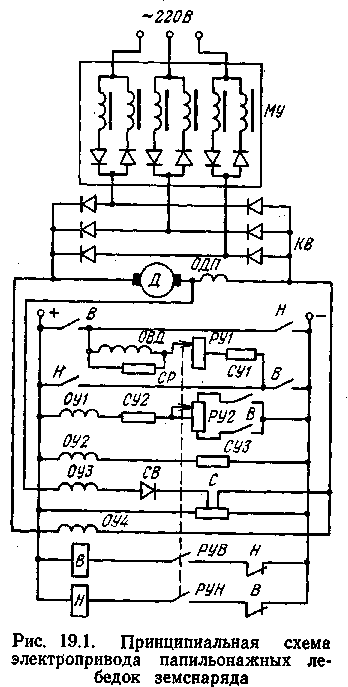
Однако применение этого электродвигателя не обеспечивает необходимого диапазона скоростей папильонирования и, главное, плавности их изменения. Более рациональным для папильонажных лебедок является электропривод постоянного тока. Принципиальная схема электропривода по системе магнитный усилитель — двигатель (МУ — Д) приведена на рис. 19.1. Регулирование скорости папильонирования осуществляется при помощи реостатов управления РУ1, РУ2, имеющих общий привод, которым оперирует машинист. Реостатом РУ2 регулируется напряжение на выходе МУ, а скорость электродвигателя Д изменяется от 0,2 ωном до ωном. Реостатом РУ1, изменяя ток в обмотке возбуждения ОВД двигателя, скорость изменяется от ωнон до 8 ωном.
Рассматриваемая система привода отвечает характеру работы лебедки, обеспечивает удобства дистанционного управления и облегчает решение задачи автоматизации работы земснаряда.
Основным направлением дальнейшего совершенствования электрооборудования установок гидромеханизации является замена дистанционного и полуавтоматического управления на полностью автоматическое управление с ограниченным дистанционным контролем. Необходима также замена релейно-контакторных схем бесконтактными. Для поддержания и регулирования режима работы установок возможно применение быстродействующих решающих устройств с самонастройкой на оптимальный режим работы.