

2.2. Приведение статических моментов
В уравнении движения электропривода (2.5) все моменты должны быть приведены к одному валу. Обычно статический и динамический моменты приводятся к валу двигателя.
Рассмотрим, как производится приведение момента статического сопротивления к валу двигателя. На рис. 2.1 приведена кинематическая схема агрегата.
Обозначим: Мс - статический момент механизма, приведенный к валу двигателя, Н-м; Мм — статический момент механизма на валу механизма, Н-м; ωд — угловая скорость двигателя, рад/с; ωм — угловая скорость механизма, рад/с; iп и ηп — передаточное число и к. п. д. промежуточных передач; G — вес груза, равный усилию Fм, Н; vм — линейная скорость движения груза, м/с.
Приведение статического момента выполняется исходя из условий равенства статической мощности на валу двигателя и валу рабочей машины. На основании равенства мощностей получим

![]()
![]()
В случае поступательного движения исполнительного органа
2.3. Приведение моментов инерции и поступательно движущихся масс
В уравнении (2.5) момент инерции системы привода является расчетной величиной для эквивалентной кинематической схемы, состоящей из одного тела, вращающегося со скоростью ω
На рис. 2.2 представлены кинематическая и эквивалентная схемы привода. Эквивалентный (приведенный) момент инерции / движущихся масс определяется из условия равенства кинетической энергии в реальной и эквивалентной системах.
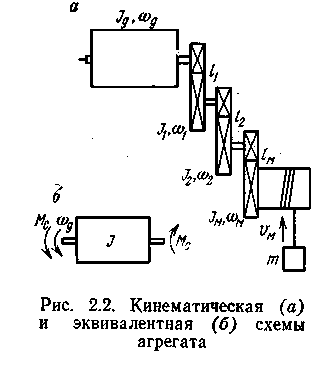
В рассматриваемой системе (рис. 2.2, а) запас кинетической энергии
![]()

2.4. Продолжительность пуска и остановки электропривода
При приближенных расчетах, принимая М = Мп. ср = const и Мс = const при изменении частоты вращения двигателя от ω = 0 до Продолжительность остановки электропривода от начальной скорости со = соиач до со = 0 при среднем тормозном моменте Мт.ср = const и Мс = const
= ωс продолжительность пуска можно определить по формуле

![]()

Продолжительность остановки электропривода возрастает с увеличением момента инерции и уменьшается с увеличением динамического момента, равного сумме тормозного Мт.ср и статического Мс моментов.
![]()
Приведенные формулы соответствуют пуску и остановке электропривода при реактивном моменте Мс и постоянном ускорении и замедлении.