

16.5. Перспективы развития электропривода и
электрооборудования
Для обеспечения оптимальных режимов бурения в породах с различными физико-химическими свойствами необходимо регулирование частоты вращения бурового става в широких пределах.
Асинхронные двигатели с короткозамкнутым ротором, которые применяются на ряде буровых станков для привода механизма вращения бурового става, не обеспечивают оптимальных режимов бурения.
Применяющаяся на станках БСШ и 2СБШ-200 для привода вращателя система Г—Д позволяет осуществить автоматическое регулирование частоты вращения бурового инструмента в зависимости от крепости буримых пород и обеспечить оптимальные режимы бурения.
Однако большие размеры, высокая стоимость и значительные эксплуатационные расходы делают нерациональным применение этой системы для буровых станков. Более совершенной является предложенная для станков ударно-вращательного бурения система электропривода силовой магнитный усилитель—двигатель (СМУ—Д). Привод вращателя бурового става станков СБШ-250МН и СБШ-320 выполнен по системе тири-сторный преобразователь — двигатель (ТП—Д) с электромагнитной системой регулирования. Такая система электропривода является наиболее перспективной.
В систему привода вращателя входят: электродвигатель, тахогенератор, задатчик частоты вращения, выпрямительное устройство, тиристорный преобразователь.
Для привода вращателя использован крановый двигатель постоянного тока. Тахогенератор представляет собой генератор постоянного тока, напряжение на выходе которого меняется в зависимости от частоты вращения его якоря. Задатчик частоты вращения предназначен для ручного регулирования частоты вращения бурового става путем изменения тока управления тиристорного преобразователя. Выпрямительное устройство предназначено для питания напряжением 110В обмоток возбуждения двигателя и тахогенератора, а также цепей управления на постоянном токе.
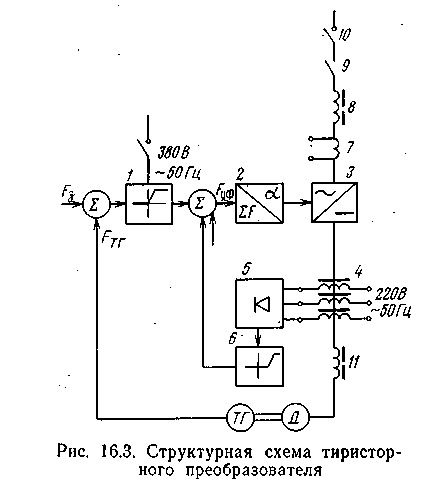
Тиристорный преобразователь, структурная схема которого приведена на рис. 16.3, предназначен для питания напряжением постоянного тока якорной обмотки двигателя. На вход преобразователя подается трехфазное напряжение 380 В переменного тока, на выходе имеем выпрямленное напряжение, регулируемое по величине от нуля до 400 В.
Настройка преобразователя на требуемое значение выпрямленного напряжения производится машинистом подачей соответствующего сигнала F3 от задатчика частоты вращения на блок ) магнитного усилителя. Сюда же подается сигнал FTГ с тахогенератора ТГ, осуществляющего обратную связь по частоте вращения привода. В блоке / эти сигналы суммируются.
Блок магнитного усилителя представляет собой комплектное устройство, состоящее из трансформатора, магнитного усилителя, диодов и регулировочных сопротивлений.
Напряжение с выхода магнитного усилителя поступает на блоки системы управления 2, которые предназначены для формирования управляющих импульсов и подачи их на первичные обмотки импульсных трансформаторов. Все три блока имеют одинаковое устройство и взаимозаменяемы. Блоки импульсных трансформаторов служат для подачи отпирающих импульсов на управляющие электроды тиристоров силового модуля. Каждый тиристор имеет свой источник импульсов.
На блоках 2 в свою очередь производится суммирование сигнала с выхода блока 1 с сигналом смещения FCM и отсечки по току FT, поступающими непосредственно на блоки системы управления. Результирующий сигнал управления Fуф формирует в блоках 2 отпирающие импульсы и подает их на управляющие электроды тиристоров силового модуля 3, который предназначен для преобразования трехфазного переменного напряжения 380 В в постоянное, регулируемое по величине. Выход силового модуля подключен на якорную обмотку двигателя вращателя Д.
Узел датчика тока 4, 5 я блок отсечки по току 6 осуществляют обратную связь по току якорной цепи двигателя Д. Узел 4, 5 предназначен для получения напряжения пропорционального току якоря двигателя вращателя. Он состоит из трехфазного проходного магнитного усилителя, выпрямительного моста и сопротивлений нагрузки. Через сердечник магнитного усилителя проходит токоведущая шина, идущая с силового модуля на якорь двигателя. В зависимости от величины тока, проходящего по ней, меняется подмагничивание сердечника, а следовательно, и напряжение на выходе рабочих обмоток усилителя, питающих выпрямительный мост. С выпрямительного моста напряжение, пропорциональное току якоря, подается на блок токовой отсечки. Питание рабочих обмоток магнитного усилителя осуществляется напряжением 220 В.
Блок токовой отсечки 6 предназначен для защиты двигателя и тиристоров от перегрузки. В блок входят: трехфазный выпрямительный мост, сопротивления, стабилитроны, триод и конденсатор.
Если при работе привода якорный ток двигателя не превышает допустимого значения, напряжение, снимаемое с узла датчика тока 4, 5, не в состоянии открыть стабилитроны и транзистор. При повышении тока якоря сверх допустимого сигнал с датчика тока достигает величины, достаточной для отпирания стабилитронов и транзистора. Напряжение на выходе преобразователя падает и привод останавливается.
Трансформатор тока 7 служит для измерения тока на стороне переменного напряжения.
Напряжение на силовой модуль 3 подается через анодные дроссели 8, магнитный пускатель 9 и автомат 10. Анодные дроссели служат для ограничения величины и скорости нарастания тока в силовой цепи преобразователя при коротких замыканиях. Кроме того, они служат для разделения параллельно работающих тиристорных устройств, питающихся от одного трансформатора. Для сглаживания пульсаций выпрямленного напряжения установлен дроссель 11.
В качестве других перспективных систем электропривода вращателя могут быть: асинхронный двигатель с дросселем насыщения и система частотного регулирования.
Г л а в а 17
ЭЛЕКТРОПРИВОД И ЭЛЕКТРООБОРУДОВАНИЕ ЭЛЕКТРОВОЗНОГО ТРАНСПОРТА