

8.3. Режимы работы и нагрузочные диаграммы электроприводов
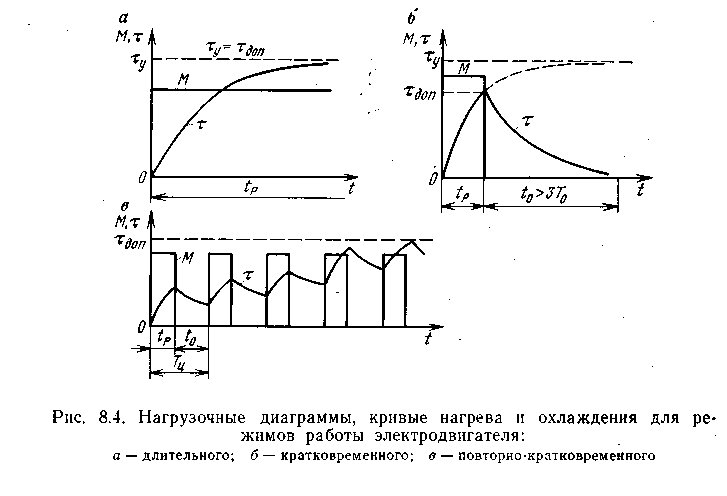
Мощность, которую может иметь двигатель на валу, не перегреваясь выше допустимого предела, зависит от продолжительности и характера нагрузки. Различают три основных режима работы двигателя: длительный, кратковременный и повторно-кратковременный.
При длительном режиме работы рабочий период настолько велик, что перегрев двигателя достигает своего установившегося значения (рис. 8.4, а).
Кратковременным режимом называют такой режим работы двигателя, при котором продолжительность рабочего периода tр недостаточна для достижения τу. Период же остановки, т. е. время охлаждения, достаточен для того, чтобы двигатель охладился до температуры окружающей среды, т. е. до т = 0 (рис. 8.4,6).
![]()
В зависимости от режимов работы, для которых предназначаются двигатели, различаются следующие номинальные мощности:
а) номинальная мощность при длительном режиме (длительная) — максимальная мощность, которую двигатель может развивать в течение произвольно долгого промежутка времени, не перегреваясь выше допустимой по нормам температуры;
б) номинальная мощность при кратковременном режиме (кратковременная) — максимальная мощность, которую может развивать двигатель в течение определенного, указанного в пас порте двигателя времени tK, не перегреваясь при этом выше установленных нормами пределов; стандартные величины кратковременной работы, для которых определются номинальные кратковременные мощности, следующие: 10, 30, 60 и 90 мин;
в) номинальная мощность при повторно-кратковременном режиме работы — максимальная мощность, при которой двигатель может работать длительно, не перегреваясь выше допустимых пределов, при условии регулярного чередования периодов работы и пауз. Стандартные значения ПВ, при которых указывается номинальная мощность, равны 15, 25, 40, 60 %
8.4. Выбор мощности электродвигателей при длительном режиме работы
Выбор мощности двигателя при неизменной нагрузке. Выбор мощности двигателя при длительной неизменной или мало меняющейся нагрузки не представляет затруднений. В этом случае номинальная длительная мощность двигателя Рном должна быть равна или несколько больше расчетной мощности на валу двигателя Ррасч, т. е. Рном ≥ Ррасч
Формулы для определения расчетной мощности в зависимости от типа машин и механизмов (насосов, вентиляторов, компрессоров и т. п.) приводятся в соответствующих литературных источниках.
По расчетной мощности Ррасч выбирают по каталогу двигатель с ближайшей большей или равной Ррасч номинальной мощностью.
Выбор мощности при переменной нагрузке. Для выбора мощности двигателя при длительной переменной нагрузке существует несколько методов, но чаще всего пользуются методом эквивалентного тока.
Сущность этого метода сводится к тому, что меняющуюся нагрузку I заменяют некоторой постоянной эквивалентной, т.е. равноценной нагрузкой (эквивалентным током Iэкв ), при которой в двигателе выделяется то же количество тепла (получается тот же нагрев), что и при действительной меняющейся нагрузке.
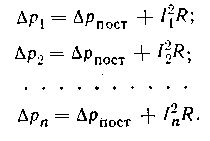
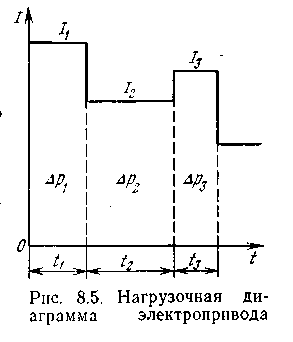
Пусть электропривод работает по графику, представленному на рис. 8.5. Здесь каждому току I1, I2, I3 соответствуют определенные потери в двигателях Δр1 Δр2, Δр3-
![]()
Переменными потерями являются потери в обмотках якоря, статора, ротора, которые пропорциональны квадрату тока и сопротивлению Apпер = I2R.
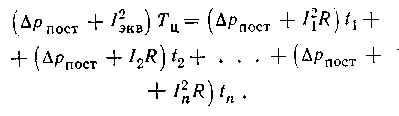
Средние потери можно выразить через эквивалентный ток Iэкв:
![]()
![]()
 Учитывая,
что постоянные потери не зависят от
нагрузки, получим выражение для
эквивалентного тока
Учитывая,
что постоянные потери не зависят от
нагрузки, получим выражение для
эквивалентного тока
Для двигателей постоянного тока независимого возбуждения при постоянной величине магнитного потока Ф = Фном момент пропорционален току, поэтому можно пользоваться. эквивалентным моментом.
![]()
Формулой (8.10) можно пользоваться и для асинхронных двигателей при нагрузках до (0,75÷0,8) Мкр.

Все приведенные формулы для определения Iэкв, Мэкв и Рэкв будут справедливы только для приводов, работающих со скоростью, близкой к номинальной, и двигателей с принудительной вентиляцией.
Если же скорость при работе привода изменяется (в периоды пуска, замедления и остановки), то в эти формулы для двигателей с самовентиляцией надо ввести поправочные коэффициенты, учитывающие ухудшение условий охлаждения двигателя при пуске, замедлении и остановке.
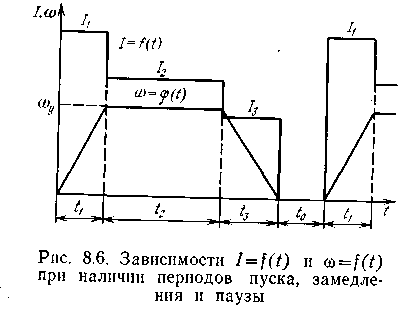
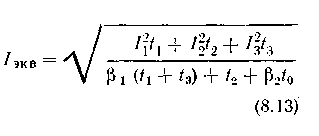
Поправочные коэффициенты рекомендуется принимать: β1 = 0,75 и β2 = 0,5. После того как тем или иным способом определены эквивалентные ток, момент или мощность двигателя, необходимо выбрать соответствующий двигатель по каталогу, соблюдаяусловия Iном ≥Iэкв ;Mном ≥Mэкв ; Pном ≥Pэкв
Выбранный таким способом двигатель должен быть проверен по перегрузочной способности и по условию пуска.