

5.4.2. Индуктивные преобразователи
Индуктивные преобразователи отличаются высокой точностью, пригодны для ведения дистанционных измерений. Сравнительно небольшие габаритные размеры индуктивных преобразователей позволяют создать компактные измерительные устройства. Единый источник энергии дает существенное преимущество перед пневматическими приборами, для которых требуется питание и электрическим током, и сжатым воздухом.
В индуктивных преобразователях используется свойство катушки изменять свое реактивное сопротивление при изменении некоторых ее параметров, определяющих индуктивность L.
Для получения возможно большей индуктивности катушку, как правило, выполняют с магнитопроводом из ферромагнитного материала. Как известно из электротехники, сопротивление такой катушки (без учета потерь на гистерезис и вихревые токи в сердечнике):
![]() ,
(5.3)
,
(5.3)
где
![]() – сопротивление катушки постоянному
току, Ом;
– сопротивление катушки постоянному
току, Ом;
![]() – индуктивное
сопротивление, Ом;
– индуктивное
сопротивление, Ом;
![]() – круговая
частота питающего напряжения, ;
– круговая
частота питающего напряжения, ;
![]() – частота,
Гц;
– частота,
Гц;
w – число витков катушки;
Rм – сопротивление магнитной цепи катушки, 1/Гн.
Обычно один из элементов магнитной цепи (рис. 5.14) выполняется подвижным (якорь), и его положение относительно неподвижной части будет влиять на магнитное сопротивление цепи Rм, а следовательно, и индуктивное сопротивление катушки.
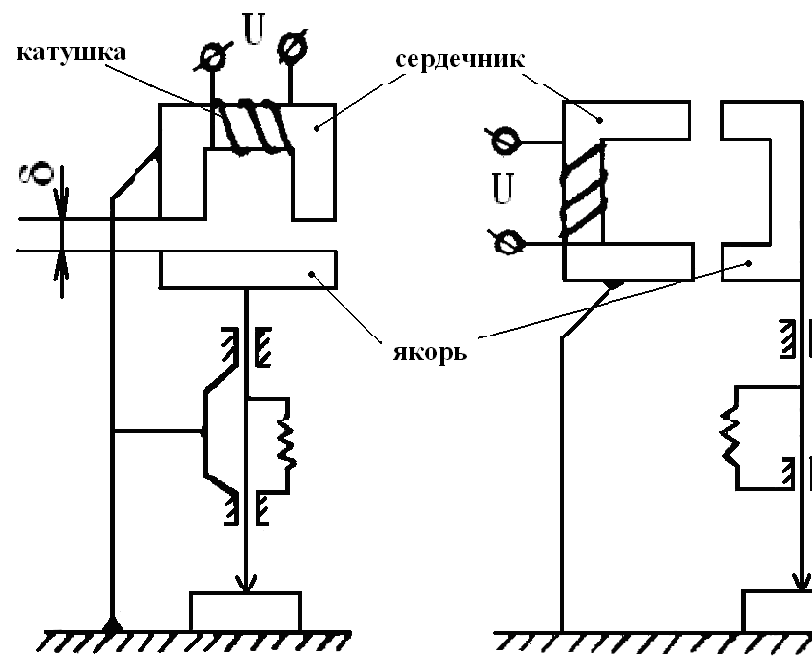
а) б)
Рисунок 5.14 – Схемы индуктивных преобразователей дроссельного типа
Если
связать перемещение якоря с измеряемой
линейной величиной
![]() при
постоянных параметрах напряжения
питания, то возникает функциональная
зависимость между зазором
и
электрическим сопротивление
при
постоянных параметрах напряжения
питания, то возникает функциональная
зависимость между зазором
и
электрическим сопротивление
![]() :
:
![]() .
(5.4)
.
(5.4)
Индуктивный прибор может быть представлен следующей принципиальной схемой (рисунок 5.15), где ИП – индуктивный преобразователь, ИС – измерительная схема, служащая для преобразования сигнала, ИП в удобный для измерения другой электрический параметр (напряжение, сила тока), У – электронный усилитель (если в этом есть необходимость), О – отсчетное устройство, К – устройство формирования управляющих команд, П – источник питания.
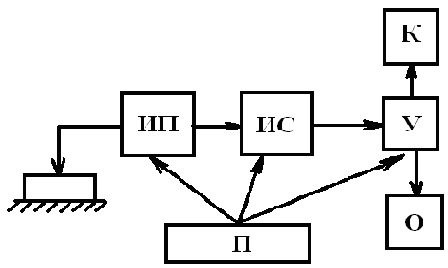
Рисунок 5.15 – Принципиальная схема индуктивного прибора
Общее передаточное отношение индуктивного прибора K будет равно:
![]() ,
(5.5)
,
(5.5)
где
![]() – передаточное отношение преобразователя;
– передаточное отношение преобразователя;
![]() или
или
![]() –
передаточное отношение измерительной
схемы;
–
передаточное отношение измерительной
схемы;
Uвс и Iвс – напряжение и ток на выходе схемы;
![]() – передаточное
отношение
(коэффициент
усиления) усилителя;
– передаточное
отношение
(коэффициент
усиления) усилителя;
U – выходное напряжение усилителя;
![]() – передаточное
отношение отсчетного устройства;
– передаточное
отношение отсчетного устройства;
– перемещение указателя.
Выражение (5.5) может быть представлено в виде
![]() .
(5.6)
.
(5.6)
При построении индуктивного прибора особо важным является правильный выбор параметров и принципиальной схемы индуктивного преобразователя.
В
применяемых в настоящее время индуктивных
преобразователях изменение индуктивного
сопротивления катушки чаще всего
достигается посредством изменения
величины воздушного зазора
между
якорем и неподвижной частью сердечника
катушки (рисунок 5.14, а) или изменением
площади зазора
![]() (рисунок 5.14, б).
(рисунок 5.14, б).
Характеристика
преобразователя
(рисунок 5.16, а) нелинейная, но если
ограничить рабочий участок преобразователя
![]() ,
то
можно считать, с некоторой погрешностью,
что передаточное отношение
,
то
можно считать, с некоторой погрешностью,
что передаточное отношение
![]() постоянно.
Передаточное отношение преобразователя
возрастает по мере уменьшения зазора.
постоянно.
Передаточное отношение преобразователя
возрастает по мере уменьшения зазора.
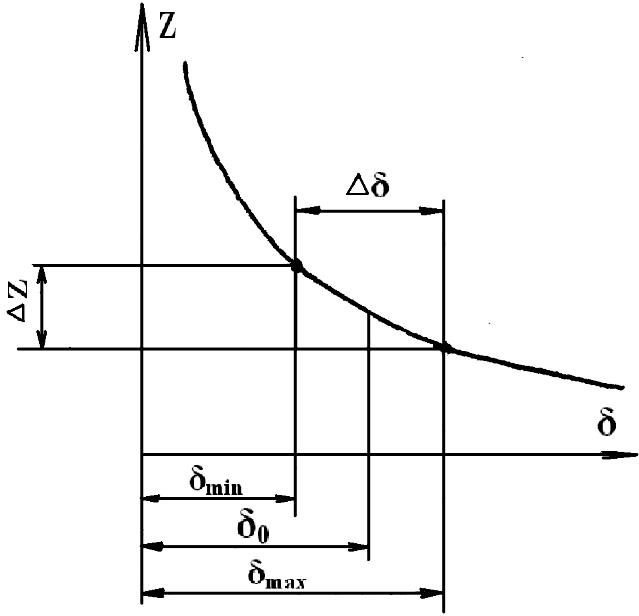
а) б)
Рисунок 5.16 – Статические характеристики преобразователей
С
целью получения более линейной
зависимости, не уменьшая величины
![]() ,
применяют индуктивные преобразователи,
принцип действия которых показан на
рисунке 5.17, а. Преобразователь имеет
две магнитные цепи с общим якорем. Под
действием измеряемой величины оба
зазора изменяются одинаково,
но с различными знаками. Такой
преобразователь обычно называют
дифференциальным.
,
применяют индуктивные преобразователи,
принцип действия которых показан на
рисунке 5.17, а. Преобразователь имеет
две магнитные цепи с общим якорем. Под
действием измеряемой величины оба
зазора изменяются одинаково,
но с различными знаками. Такой
преобразователь обычно называют
дифференциальным.
При соответствующем включении обеих катушек в измерительную схему дифференциальный преобразователь имеет примерно в два раза большую чувствительность и менее чувствителен к колебаниям окружающей температуры, питающего напряжения и его частоты.
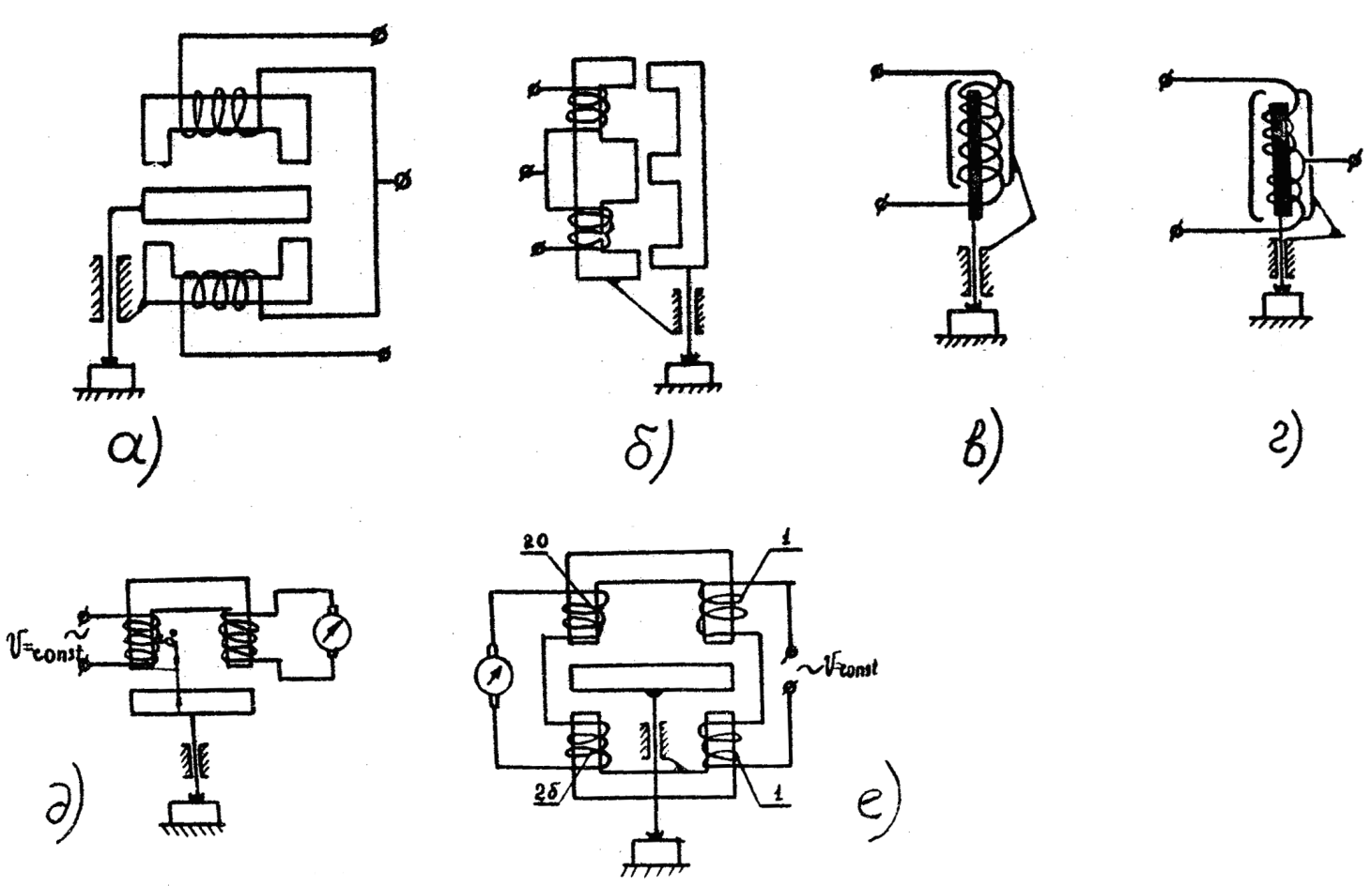
а) б) в) г)
Рисунок 5.17 – Схемы индуктивных преобразователей
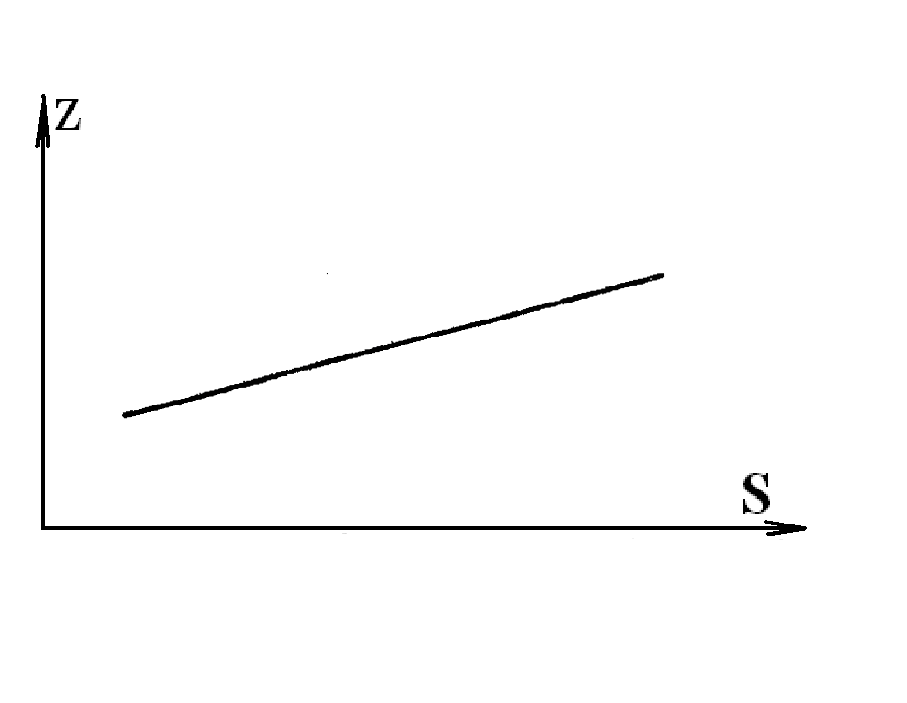
Индуктивные
преобразователи с переменной площадью
воздушного зазора имеют линейную
характеристику
![]() (рисунок
5.16, б), но не высокую чувствительность,
используются для измерения больших
перемещений. Дифференциальная схема
данного типа преобразователя (рисунок
5.17, б) обладает аналогичными преимуществами.
(рисунок
5.16, б), но не высокую чувствительность,
используются для измерения больших
перемещений. Дифференциальная схема
данного типа преобразователя (рисунок
5.17, б) обладает аналогичными преимуществами.
Для измерения перемещений нескольких десятков миллиметров применяются преобразователи с разомкнутой магнитной цепью, так называемые преобразователи соленоидного типа. На рисунке 5.17 в, г приведены схемы недифференциального и дифференциального преобразователя соленоидного типа. Для целей повышения чувствительности катушка заключается в ферромагнитный корпус.
Индуктивный преобразователь модели БВ-6067 представляет собой преобразователь соленоидного типа с разомкнутой магнитной цепью. На рисунке 5.18 представлена конструкция такого преобразователя. Его работа основана на принципе изменения площади сечения магнитопровода при смещении измерительного стержня. За счет этого изменяется индуктивное сопротивление катушек преобразователя и их выходное напряжение.
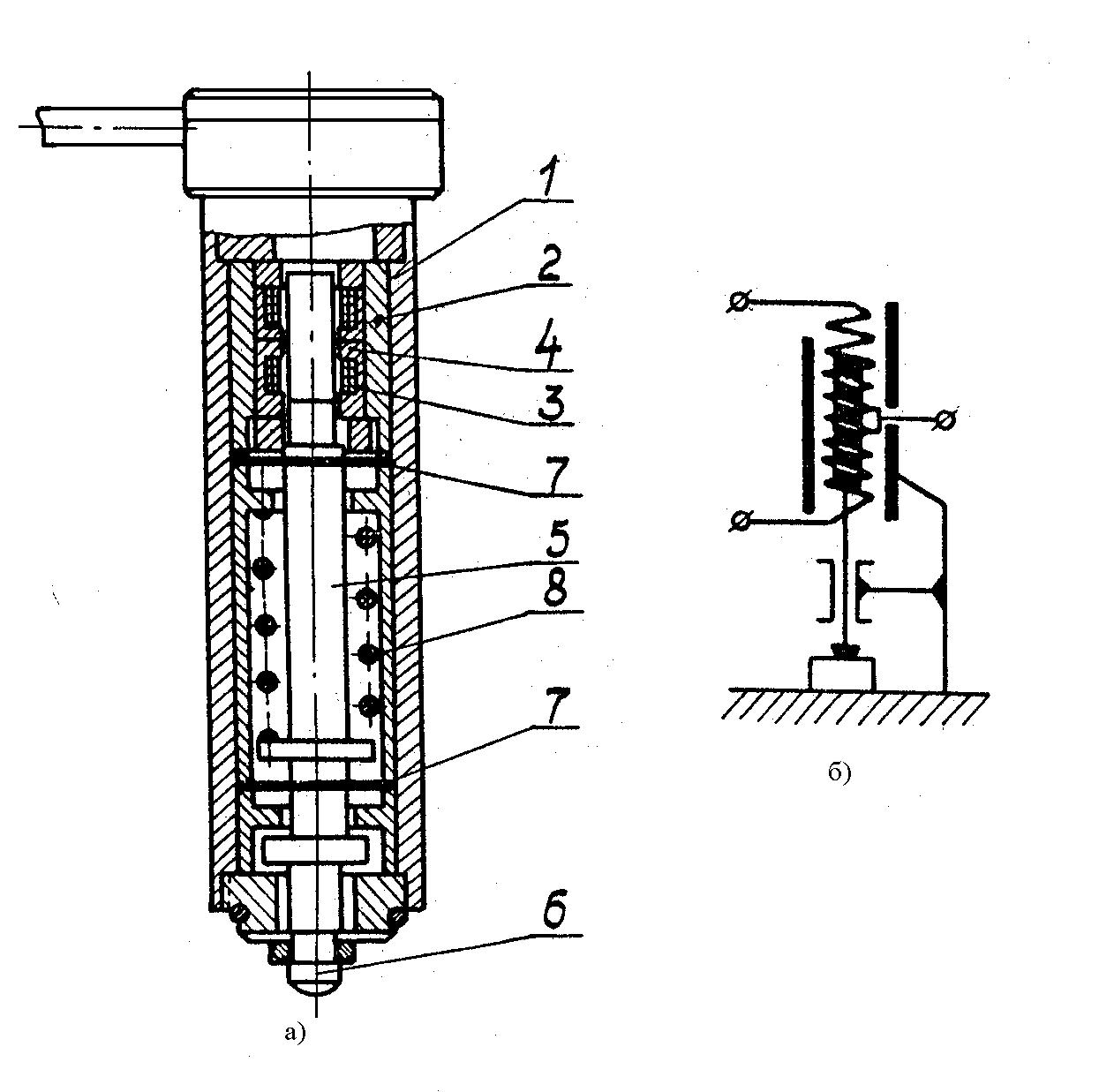
Рисунок 5.18 – Индуктивный преобразователь соленоидного типа
Сигналы преобразователя, амплитуда которых пропорциональна контролируемому размеру, преобразуются электронным блоком в сигнал, по величине изменения которого определяют изменение размера контролируемой детали.
Конструктивно преобразователь выполнен в виде цилиндрического корпуса 1, внутри которого 1 под защитным кожухом 2, изготовленным из латуни, расположены две катушки 3. Магнитопровод 4 изготавливается из стали марки Э12. Измерительный стержень 5, несущий измерительный наконечник 6, установлен на двух дисковых плоских пружинах 7, имеющих концентрические круговые прорезы, что обеспечивает плавное перемещение измерительного стержня без трения и люфтов. Измерительный стержень 5 – сборный, его верхняя часть, являющаяся сердечником (якорем), изготавливается из феррита, а остальная часть- из латуни. Измерительное усилие создается пружиной 8. Провода из преобразователя выводятся экранированным кабелем.
В
существующих приборах индуктивные
преобразователи позволяют получить
цену деления 0,05 – 1 мкм и пределы измерения
от
![]() 0,003
мм до 1,5 мм.
0,003
мм до 1,5 мм.
В таблице 5.6 дана техническая характеристика индуктивного преобразователя соленоидного типа.
Таблица 5.6 – Технические характеристики индуктивного преобразователя
Предел измерения, мкм с не линейностью: 10 мкм, 1мкм, мкм |
±500 ±300 |
Погрешность срабатывания, мкм |
+0,5мкм |
Смещение настройки на 65000 циклов, мкм |
±0,5 |
Измерительное усилие, Н |
1,0 |
Колебание измерительного усилия, Н |
0,2 |