5.2.5. Расчёт допускаемой погрешности измерения
Величина допускаемой погрешности измерения Δр на этапе проектирования измерительного устройства может быть ориентировочно определена исходя из допуска Т на конролируемый параметр (таблица 3.1) по формуле
![]() .
(5.1)
.
(5.1)
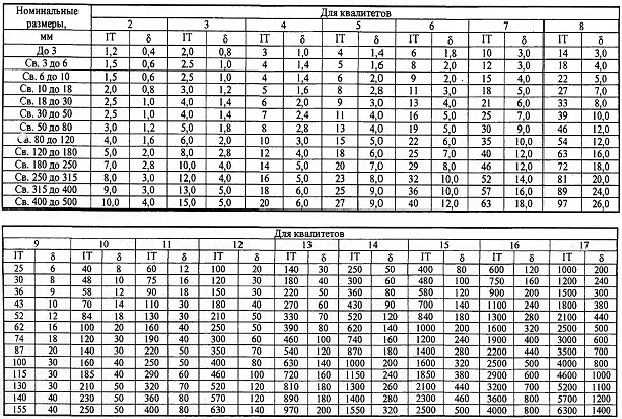
Значения допускаемых погрешностей измерения Δр регламентирует ГОСТ 8.051-81 (таблица 5.3).
Таблица 5.3 – Допускаемые погрешности измерений в зависимости от допусков IT, мкм (ГОСТ 8.051-81)
5.3. Описание принципа работы измерительной станции
Разработать кинематическую схему измерительной станции. Описать структуру станции, охарактеризовать назначение основных элементов и дать описание принципа её работы. Пример оформления схемы измерительной станции и описания принципа её работы представлен в приложении 1.
Измерительные станции обычно проектируются в виде самостоятельных узлов и включают в себя механизмы, необходимые для базирования и измерения детали:
базирующие элементы (призмы, измерительные центры, оправки, измерительные столики, цанги и т.п.);
передаточные механизмы (рычажные передачи, пружинные параллелограммы);
первичные измерительные преобразователи (пневматические, индуктивные, электроконтактные, фотоэлектрические и другие);
регулируемые стойки и кронштейны для крепления измерительного преобразователя и передаточного механизма;
элементы настройки измерительных преобразователей;
направляющие для перемещения контролируемых деталей или измерительных преобразователей;
механизмы приводов перемещения и вращения узлов измерительной станции или контролируемой детали.
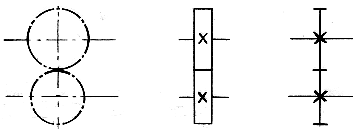
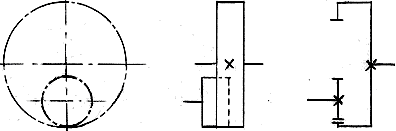
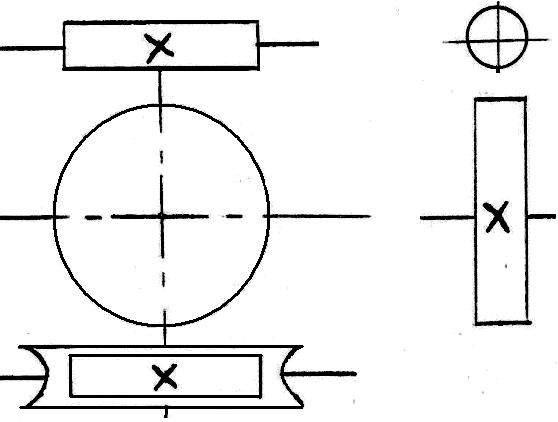
В таблице 5.4 представлены условные обозначения механических элементов в кинематических схемах.
Таблица 5.4 – Условные обозначения в кинематических схемах
Наименование |
Обозначение |
Винт, передающий движение |
|
Гайка на винте, передающем движение |
|
Рычаг переключения
|
|
Пружины цилиндрические: сжатия;
растяжения |
|
|
|
Передачи зубчатые цилиндрические:
- внешнее зацепление; |
|
- внутреннее зацепление
|
|
Передачи конические
|
|
Передачи червячные с цилиндрическим червяком
|
|
Реечные передачи |
|
Подшипники скольжения: - радиальные;
- радиально-упорные односторонние |
|
|
|
Подшипники качения: - упорные односторонние; |
|
- радиальные; |
|
- радиально-упорные односторонние |
|
Муфты: - общее обозначение;
- упругие
|
|
|
|
Соединение частей звена неподвижное |
|
Поступательная пара |
|
Винтовая пара |
|
Вращательная пара |
|
Упоры подвижные |
|