

Цифровые системы с экстраполятором первого порядка
Передаточная функция непрерывной части в высокочастотной области |
Эквивалентная передаточная функция |
|
|
|
|
В цифровых системах с экстраполятором нулевого порядка эквивалентная постоянная времени, которая должна учитываться в формуле для малых постоянных времени, равна
![]() ,
(5.13)
,
(5.13)
где
![]() -
сумма малых постоянных времени, а
-
временное запаздывание.
-
сумма малых постоянных времени, а
-
временное запаздывание.
В цифровых системах с экстраполятором первого порядка аналогичная эквивалентная постоянная времени равна
![]() (5.14)
(5.14)
Изложенное позволяет
сформулировать требования к типовым
передаточным функциям разомкнутой
дискретной системы. Их выполнение
гарантирует получение заданного запаса
устойчивости. В низкочастотной области
л. а. х.
![]() должна совпадать с какой-либо типовой
л. а. х. симметричного или несимметричного
вида, используемой в непрерывных
системах, а ее высокочастотный "хвост"
должен удовлетворять требованиям по
ограничению суммы малых постоянных
времени. Покажем это на примере получения
типовых передаточных функций цифровых
систем.
должна совпадать с какой-либо типовой
л. а. х. симметричного или несимметричного
вида, используемой в непрерывных
системах, а ее высокочастотный "хвост"
должен удовлетворять требованиям по
ограничению суммы малых постоянных
времени. Покажем это на примере получения
типовых передаточных функций цифровых
систем.
В таблице 5.4 приведены типовые передаточные функции, которым соответствуют л. а. х. симметричного вида, для цифровых систем с экстраполятором нулевого порядка при D(z)=1 и запаздывании =0. Кроме того, принято, что постоянные времени удовлетворяют условиям:
![]() где i=3,4,...,n.
Это означает, что вертикальная прямая
где i=3,4,...,n.
Это означает, что вертикальная прямая
![]() пересекает асимптоту л. а. х., имеющую
наклон 20 дб/дек.
Если
выполняются условия
пересекает асимптоту л. а. х., имеющую
наклон 20 дб/дек.
Если
выполняются условия
![]() где i=4,5,...,
то вид высокочастотной части л. а. х.
изменится в соответствии с таблицами
5.2 и 5.3. Таблица 5.5 соответствует таким
же передаточным функциям цифровых
систем, но с использованием экстраполяторов
первого порядка.
где i=4,5,...,
то вид высокочастотной части л. а. х.
изменится в соответствии с таблицами
5.2 и 5.3. Таблица 5.5 соответствует таким
же передаточным функциям цифровых
систем, но с использованием экстраполяторов
первого порядка.
Асимптотические л. а. х., соответствующие типовым передаточным функциям таблицы 5.4 и 5.5, изображены на рисунке 5.3.
На рисунке 5.3, а
- изображены л. а. х., соответствующие
дискретной частотной передаточной
функции, а на рисунке 5.3, б
- соответствующие
исходной передаточной функции непрерывной
части. Граничная постоянная времени
![]() ,
для цифровых
систем с экстраполятором нулевого
порядка равна
,
для цифровых
систем с экстраполятором нулевого
порядка равна
![]() для цифровых систем с экстраполятором
первого порядка
для цифровых систем с экстраполятором
первого порядка
![]() .
.
Наличие временного
запаздывания
![]() не меняет вида типовых передаточных
функций. Необходимо только учесть это
запаздывание в общей сумме малых
постоянных времени.
не меняет вида типовых передаточных
функций. Необходимо только учесть это
запаздывание в общей сумме малых
постоянных времени.
Типовые передаточные функции разомкнутых систем, которым соответствуют л. а. х. несимметричного вида, могут быть составлены по такому же принципу, т. е. посредством объединения требуемого вида передаточной функции в низкочастотной части с ее высокочастотной частью, которая дается табл. 5.2 и 5.3.
Так, например, рассмотрим л. а. х. типа 1—2—3 ... . Этой л. а. х. соответствует передаточная функция разомкнутой системы:
 (5.15)
(5.15)
Таблица 5.4
Типовые передаточные функции цифровых систем с экстраполяторами нулевого порядка
r |
Передаточная функция непрерывной части |
Дискретная частотная передаточная функция |
0 |
|
|
1 |
|
|
2 |
|
|
Таблица 5.5
Типовые передаточные функции цифровых систем с экстраполяторами первого порядка
r |
Передаточная функция непрерывной части |
Дискретная частотная передаточная функция |
0 |
|
|
1 |
|
|
2 |
|
|
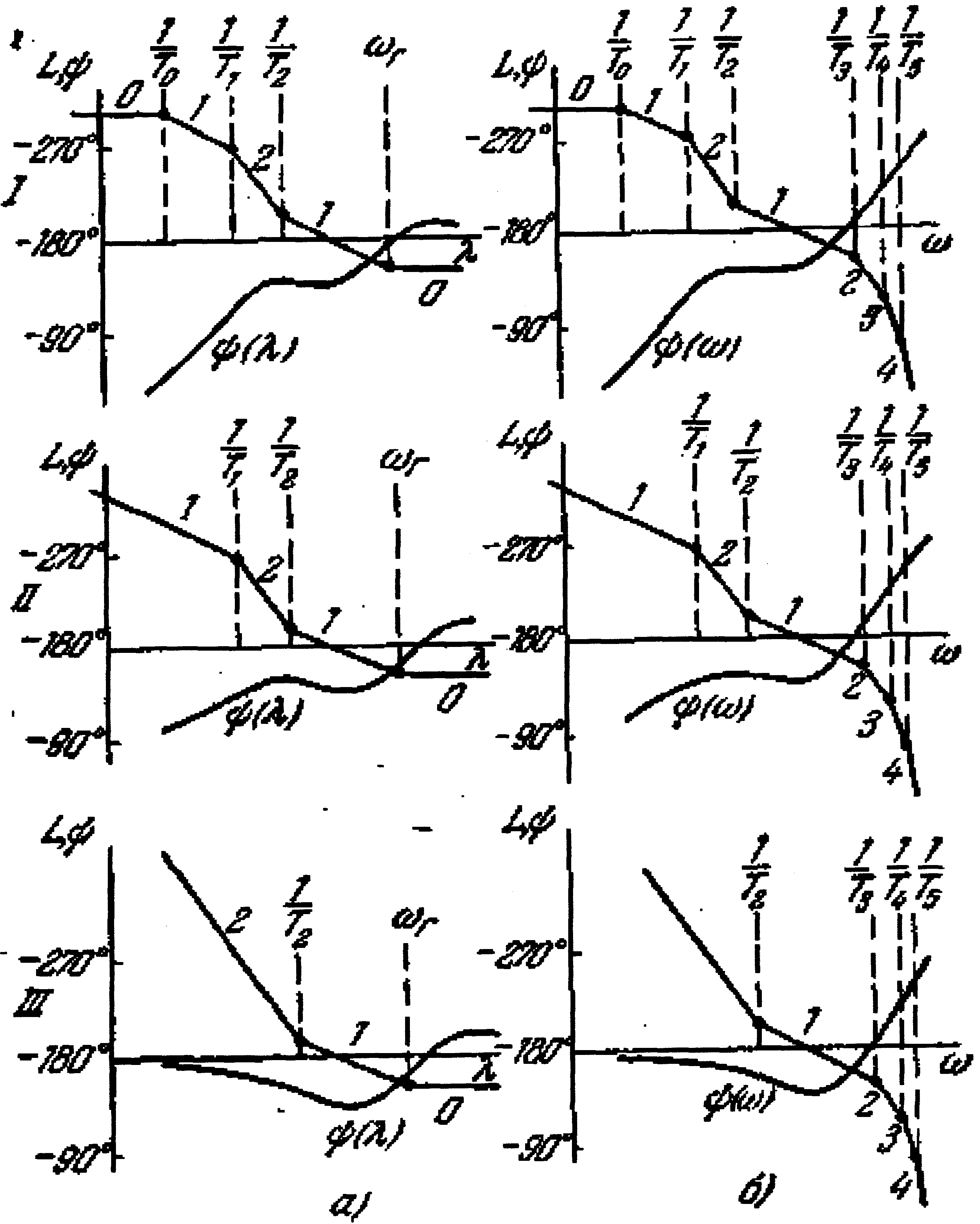
Рисунок 5.3 - Типовые л. а. х. цифровых систем.
Требуемый запас
устойчивости в цифровой системе с
экстраполятором нулевого порядка будет
обеспечен, если выполняется условие
![]() (5.16)
(5.16)
Последнее условие
является достаточным и обеспечивает
отсутствие захода в область, ограниченную
прямой
(см. рис. 5.2), если имеется хотя бы одна
постоянная времени, по величине большая
чем 0,5Т. Если для всех постоянных времени
справедливо неравенство
,
то для предотвращения захода
высокочастотного “хвоста” л.а.х. в
запретную зону необходимо выполнить
дополнительное условие
![]() (5.17)
(5.17)