

Лекция 15 датчики
15.1. Первичные преобразователи (датчики)
Важнейшими элементами систем управления являются датчики предназначенные для получения количественной информации o подлежащих измерению механических, тепловых, оптических и других величинах.
Так как системы управления строятся в основном на основе электронных регуляторов, то при измерении любых величин чаще других применяются электрические средства измерений, обладающие следующими преимуществами:
простотой изменения чувствительности в широком диапазоне значений измеряемой величины за счет использования усилителей электрических сигналов;
малой инерционностью электрической аппаратуры, позволяющей использовать одни и те же средства измерений для процессов, протекающих во времени в широком диапазоне скоростей;
практически мгновенной (со скоростью света) передачей сигнала на значительные расстояния, упрощающей замеры в недоступных местах и позволяющей одновременный замер большого количества величин разной физической природы на больших расстояниях.
Датчики обычно классифицируются и получают названия по измеряемой ими величине и параметру, в который преобразуются сигналы чувствительного элемента, например индуктивный датчик перемещения преобразует измеряемое перемещение объекта в изменение индуктивности и реактивного сопротивления дросселя. Измерение есть операция сравнения измеряемой физической величины с другой величиной того же рода, принятой за единицу.
Измерительное преобразование представляет собой преобразование значения одной физической величины в значение другой физической величины, функционально с ней связанной. Например, в термометре температура преображается в длину столбика ртути или спирта, при этом функциональной связью между этими величинами является закон теплового расширения жидкостей.
Многие неэлектрические величины удобно предварительно преобразовать в механическое перемещение, после чего с помощью датчика перемещения получить электрический сигнал. Например, давление газа или жидкости можно определить закром перемещения упругой мембраны. Поэтому в автоматике широкое распространение получили датчики перемещения.
Измерительный прибор (рис. 15.1, а), как правило, состоит из первичного преобразователя (датчика Д), указателя или регистратора (УК), представляющего измеряемую величину в удобной
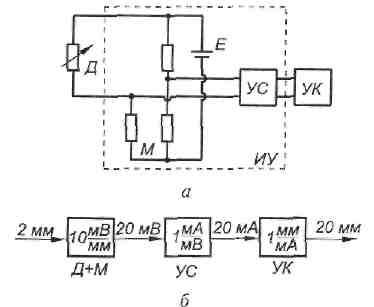
Риссунок 15.1 - Структура измерительного прибора
для использования форме, и измерительного устройства (ИУ), осуществляющего преобразование выходного сигнала датчика во входной сигнал указателя. Например, при измерении температуры можно в качестве датчика использовать терморезистор (резистор, меняющий свое сопротивление при изменении температуры), в качестве указателя можно взять амперметр с соответствующей градуировкой; измерительным устройством здесь будет электрическая схема контроля изменения сопротивления терморезистора, включающая измерительный мост М и усилитель УС. Таким образом, измеряемая величина подвергается в измерительном приборе серии преобразований.
Условия на реальном объекте измерения обычно значительно более жесткие, чем в месте регистрации (повышенная температура, вибрации, влажность, пыль, недостаток места). Поэтому в точке, в которой необходимо провести измерение, размещается минимум преобразователей, достаточный для фиксации значения измеряемой величины и преобразования его в форму, пригодную для передачи из зоны объекта в более благоприятную зону (хотя бы на расстояние нескольких метров), где размещается измерительное устройство.
Датчиком измерительного прибора называется совокупность преобразователей, размещаемых непосредственно на объекте измерения и удовлетворяющих, как правило, более жестким эксплуатационным требованиям. Указатель, регистратор, устройство отображения информации должны быть размещены там, где используются результаты измерения, например на пульте оператора. При создании указателей основным требованием является удобство использования результатов замеров.
Раздельное конструктивное исполнение датчиков, измерительных устройств и указателей в совокупности со следованием стандартам соответствующих входных и выходных величин этих элементов обеспечивает гибкость в применении, простой ремонт, универсальность и взаимозаменяемость. Обычно датчик состоит из двух преобразователей: предварительного, воспринимающего измеряемую величину (щуп, рычаг) без перевода ее в другую форму, и основного, предназначенного для преобразования измеряемой величины в электрический сигнал.