

Лекция 21 Дискретные системы управления на основе малых локальных сетей
Малые локальные сети (МЛС) являются видом последовательных магистральных интерфейсов, ориентированных на решение задач нижнего уровня распределенных систем управления (РСУ), то есть на сопряжение с ЭВМ рассредоточенных цифровых датчиков и исполнительных органов.
Малые локальные сети применяются в машиностроении, химии, бытовой электронике, автомобильном оборудовании, в малых контрольно-измерительных приборах.
Стандартизуются 2 типа МЛС РСУ:
Высокоскоростная сеть - для микроконтроллеров и устройств сопряжения, вырабатывающих большой объем данных в реальном времени;
Низкоскоростная, ориентированная на датчики.
Стандартизация магистральной МЛС ведется рабочими Группами 65С IEC.
Общие требования к МЛС РСУ (IEC):
наличие нормированных сопряжений
простое задание адресов подключения устройств к магистрали
преимущественное применение 2-х проводных линий
максимальное число подключаемых к магистрали устройств >=1000
время передачи команды управления 550 мсек
гальваническая развязка между средствами автоматизации и технологическим оборудованием
допускаются 2 необнаруженные ошибки за 1000 лет
возможность питания устройств, подключенных к магистрали, по проводам магистрали.
Примеры МЛС РСУ:
Bitbus, CCS, D2B, EUREKA, I2C, ISA, SP-50, FIP, HP-IL, MIDI, MIL SDT 1553B, MIL STD 1773, S-net.
Bitbus.
Основой сети является быстродействующая последовательная управляющая магистраль, которая может быть использована для построения иерархических систем, причем многоуровневая модель состоит из нескольких систем Bitbus.
Программно - аппаратное обеспечение обеспечивает обмен сообщениями между задачами задатчика и исполнителями, которые реагируют ответами. Этот последовательный принцип передачи обеспечивает простоту реализации.
Основной элемент интерфейса - узел, включающий расширитель и повторитель. Задатчик управляет всеми операциями на магистрали. Задатчик всего один. Он инициирует сообщения (команды исполнителю), затем опрашивает исполнителей до тех пор, пока не получит ответное сообщение. В одной такой системе: <=200 исполнителей.
Расширитель является дополнительным процессором узла и позволяет строить недорогие узлы на основе одного процессора - расширителя и процессора для сопряжения с интерфейсом.
При разделении процессов, выполняемых на этих двух процессорах, необходимо учитывать, что процессор сопряжения может разгружать прикладной процессор (основной) в то время как этот прикладной процессор может передавать сообщение по магистрали. Эта возможность может быть реализована и для реализации шлюзов (Gateway) между несколькими системами.
Gateway - это устройство связи, позволяющее одной сети подключаться к другой.
Контроллер интерфейса I2C, встроенный в МП и одноплатную ЭВМ типа 8048/8051 с включением программных средств поддержки интерфейсов I2C и D2B.
Структура программного обеспечения стимулирует разработку устройств более широкой номенклатуры: индикаторов, контроллеров индикаторов, АЦП, ЦАП, селекторов TV - каналов.
Интерфейс I2C: длина связи до 10 м, скорость передачи данных 102104 бит/сек. Этот интерфейс служит для соединения совместимого программного обеспечения внутри комплекса, управляемого от микро-ЭВМ (ПЭВМ).
Для интерфейса D2B: длина связи до 150 м, скорость передачи данных до 105 байт/сек.
Интерфейс HP-IL предназначен для построения малых кольцевых последовательных систем и сетей с низкой потребляемой мощностью и стоимостью.
Архитектура HP-IL: типа задатчик - исполнитель, то есть используется один контроллер (диспетчер), а остальные устройства - исполнители. Возможна работа с несколькими контроллерами в режиме разделения времени. Работа: сообщение проходит последовательно через все устройства и возвращается в устройство - источник, где проверяется на отсутствие ошибок. В устройстве используется двухпроводная линия, образуя замкнутую петлю. В петле в каждый момент времени передается только одно сообщение. Контроллер или источник ожидает возврата посланного им сообщения, затем посылает следующее. Адресуемый приемник запоминает текущий кадр в то время как устройство готовится к приему следующего кадра. Ввиду того, что источник непрерывно посылает кадры данных, контроллер передает следующий кадр только после получения им 1-го бита посланного им предыдущего кадра. Проверка ошибок принятого кадра осуществляется параллельно с передачей следующего кадра. Скорость передачи для этого интерфейса 20 кб/сек.
Интерфейс MIDI (Musical Instrument Digital Interface) работает в асинхронном режиме со скоростью 31260 бод.
Архитектура малых локальных сетей представлена на рисунке 14.1.
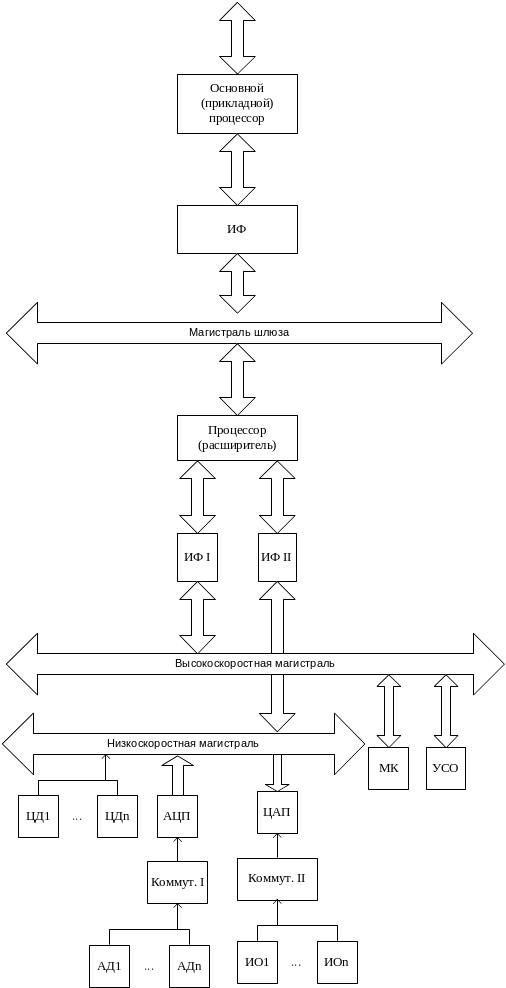
Рисунок 21.1 – Архитектура малых локальных сетей
Как видно, данная МЛС является цифровой системой, в которой используется как квантование сигнала по уровню (релейная система), так и квантование по времени (импульсная система). В системе используется так называемое управление, то есть когда имеется основная прикладная управляющая ЭВМ.