

15.3. Измерительные цепи
Измерительные цепи с генераторными первичными преобразователями предназначены главным образом для усиления сигнала от датчика до уровня, достаточного для надежной передачи на требуемое расстояние и для регистрации. Основной задачей при проектировании является взаимное согласование смежных преобразователей по сопротивлениям их входных и выходных цепей.
Измерительные цепи с параметрическими преобразователями предназначены для преобразования изменения активного (резистор) или реактивного (индуктивность или емкость) сопротивления в изменение напряжения или тока. Естественно, при замере реактивных сопротивлений обязательно использование источника питания переменного тока. При замере активного сопротивления возможно применение питания как переменным, так и постоянным током. Окончательное решение принимается из сторонних соображений: конструкции измерительного устройства и регистратора, наличия источника питания переменного или постоянного тока и т.д. Ниже рассмотрены несколько вариантов измерительных цепей прямого преобразования для определения изменения сопротивления первичного преобразователя (тензорезистора, терморезистора, индуктивного датчика).
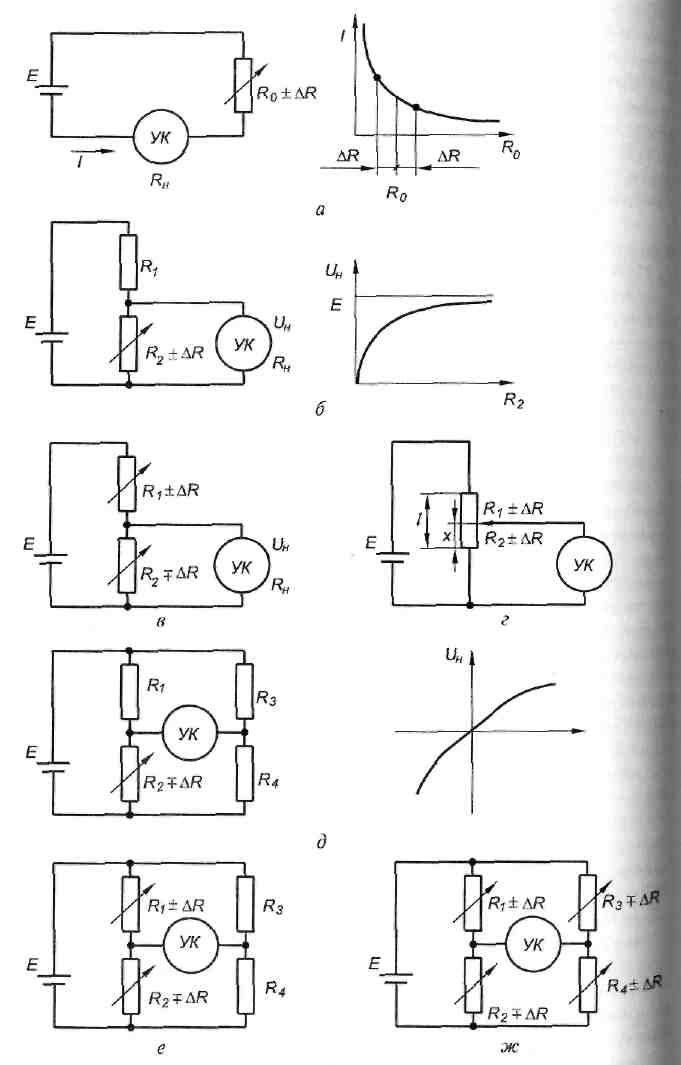
Простейшая измерительная цепь последовательного включения чувствительного элемента показана на рис. 15.3.6, а. Датчик под действием измеряемой величины меняет свое сопротивление R0, в результате чего меняется ток в цепи и отклонение стрелки указателя УК. Основным недостатком такой схемы является нелинейная (гиперболическая) зависимость тока в цепи от сопротивления
![]()
Нелинейность может
быть учтена за счет нелинейной градуировки
шкалы указателя (что неудобно для
применения в системах управления)
или работы на малом участке гиперболической
характеристики, когда кривизной можно
пренебречь, а характеристику считать
линейной. Это приводит к сужению рабочего
диапазона и снижению чувствительности
и точности прибора. Схема измерительной
цепи в виде делителя напряжения
представлена на рис. 3.6, б.
Если
параметрическим преобразователем
является![]() ,
то можно показать, что максимальная
чувствительность преобразователя
,
то можно показать, что максимальная
чувствительность преобразователя![]() достигается
при
достигается
при![]() ,
а
,
а
![]() (при
изменении
(при
изменении![]() на
на![]() изменится
на 1 %).
изменится
на 1 %).
В дифференциальном
преобразователе (рис. 15.3.6, в)
оба плеча![]() и
и![]() делителя
активны, при изменении входной величины
они оба меняются, но в противоположных
направлениях (при увеличении
сопротивления первого плеча
делителя
активны, при изменении входной величины
они оба меняются, но в противоположных
направлениях (при увеличении
сопротивления первого плеча![]() на
на![]() сопротивление
второго плеча
сопротивление
второго плеча![]() падает
на
падает
на![]() ).
В этом случае характеристика
преобразователя полностью линейна;
если быть точным, эта характеристика
линейна при сопротивлении нагрузки
(входном сопротивлении вольтметра)
).
В этом случае характеристика
преобразователя полностью линейна;
если быть точным, эта характеристика
линейна при сопротивлении нагрузки
(входном сопротивлении вольтметра)![]()
Максимальная
чувствительность преобразователя
достигается при![]() ,
когда
,
когда![]()
На рис. 15.2, г приведен
дифференциальный преобразователь,
встроенный нареостате путем его
потенциометрического включения.
Главной задачей при расчете такой
измерительной цепи является правильный
выбор![]() в
зависимости от входного сопротивления
указателя
в
зависимости от входного сопротивления
указателя![]()
Главным недостатком рассмотренных измерительных цепей
является ненулевое
значение выходного параметра (тока или
на-пряжения) при базовом значении входной
величины и соответственно базовых
значениях![]()
В неравновесных
мостах для устранения этого недостатка
про-водят исходную компенсацию начального
значения выходного сигнала Y,
так что при
нулевом входном сигнале выходной сигнал
также равен нулю. Для этого к делителю
![]() (рис. 15.3.6,
д), держащему
параметрический преобразователь
(рис. 15.3.6,
д), держащему
параметрический преобразователь![]() ,
добавляются ещё делители
,
добавляются ещё делители
![]() с
тем, чтобы при
с
тем, чтобы при
![]() и начальном
значении
и начальном
значении![]() ток в
выходнойцепи
ток в
выходнойцепи![]() и
напряжение на указателе
и
напряжение на указателе
![]() отсутствовали.
отсутствовали.
Состояние равновесия
моста![]() устанавливается
перед началом измерения при
устанавливается
перед началом измерения при
![]() регулировкой
сопротивления одного из плеч моста при
постоянных сопротивлениях остальных
плеч
(условие равновесия моста
регулировкой
сопротивления одного из плеч моста при
постоянных сопротивлениях остальных
плеч
(условие равновесия моста![]() ).
Характеристика рассмотренного моста
может считаться линейной лишь в узком
диапазоне, где при
).
Характеристика рассмотренного моста
может считаться линейной лишь в узком
диапазоне, где при
![]() выполняется
примерное
равенство
выполняется
примерное
равенство![]()
Неравновесный
мост с дифференциальным преобразователем
и двумя активными плечами моста
![]() (рис. 15.3.6,
е) имеет
(рис. 15.3.6,
е) имеет
линейную характеристику при повышенной чувствительности.
При
![]() справедливо
равенство
справедливо
равенство![]()
Значение коэффициента
0,5 объясняется влиянием на выходное
напряжение![]() изменения
как
изменения
как![]() ,
так и
,
так и![]() .
Следует подчеркнуть, что сопротивления
плеч
.
Следует подчеркнуть, что сопротивления
плеч![]() и
и![]() должны
меняться в противоположных направлениях.
Если оба сопротивления возрастут или
уменьшатся на одну и ту же величину
должны
меняться в противоположных направлениях.
Если оба сопротивления возрастут или
уменьшатся на одну и ту же величину![]() ,
то мост останется в равновесии и
,
то мост останется в равновесии и![]() не
изменится. В частности, одновременное
изменение сопротивлений плеч моста
в результате изменения температуры
не проявится на результатах измерений,
что также является существенным
преимуществом мостовых измерительных
схем.
не
изменится. В частности, одновременное
изменение сопротивлений плеч моста
в результате изменения температуры
не проявится на результатах измерений,
что также является существенным
преимуществом мостовых измерительных
схем.
Неравновесный
мост с двумя дифференциальными
преобразователями (рис. 15.3.6, ж)
имеет четыре
активных плеча моста![]()
![]() включенных
так, чтобы при увеличении сопротивлений
включенных
так, чтобы при увеличении сопротивлений![]() на
на![]() происходило
уменьшение сопротивлений
происходило
уменьшение сопротивлений![]()
и![]() .
Такой мост имеет линейную характеристику
и еще большую
чувствительность. При
.
Такой мост имеет линейную характеристику
и еще большую
чувствительность. При
![]() справедливо
равенство
справедливо
равенство
![]()
Возможны другие
способы построения неравновесных мостов
например, активными плечами могут быть![]() и
даже
и
даже![]() и
Rз),
однако для всех них справедливо следующее.
и
Rз),
однако для всех них справедливо следующее.
Наибольшее влияние
на точность измерения оказывает
отноcительная
чувствительность параметрического
преобразователя. Вторым по значимости
фактором является допустимая потребляемая
мощность преобразователя. Из формул
![]() следует, что добиться роста выходного
напряжения можно повышением напряжения
питания Е,
что приведет
к повышению токов в цепи и нагреву
преобразователя.
следует, что добиться роста выходного
напряжения можно повышением напряжения
питания Е,
что приведет
к повышению токов в цепи и нагреву
преобразователя.
Обычно преобразователи
имеют жесткое ограничение на рабочую
температуру, что отражается в ограничении
на максимально допустимый
ток через него и напряжение питания
моста. Так для тензодатчиков рекомендуемый
номинальный ток![]() составляет
30 мА, что при его сопротивлении
составляет
30 мА, что при его сопротивлении![]() дает
напряжение
питания
дает
напряжение
питания
![]() порядка
5 В. Измерительные мосты
переменного тока несколько сложнее
мостов постоянного тока, однако многие
параметрические преобразователи не
могут применяться в цепях постоянного
тока. Индуктивные и емкостные датчики
меняют реактивное сопротивление плеча
моста, замерить которое можно только
пропуская через него переменный ток.
Кроме того, усиление и передача переменного
тока значительно
проще, чем постоянного. Поэтому
измерительные цепи переменного
тока часто используют даже в тех случаях,
когда можно было бы работать и на
постоянном токе (например, при
использовании в качестве параметрических
преобразователей тензотерморезисторов).
порядка
5 В. Измерительные мосты
переменного тока несколько сложнее
мостов постоянного тока, однако многие
параметрические преобразователи не
могут применяться в цепях постоянного
тока. Индуктивные и емкостные датчики
меняют реактивное сопротивление плеча
моста, замерить которое можно только
пропуская через него переменный ток.
Кроме того, усиление и передача переменного
тока значительно
проще, чем постоянного. Поэтому
измерительные цепи переменного
тока часто используют даже в тех случаях,
когда можно было бы работать и на
постоянном токе (например, при
использовании в качестве параметрических
преобразователей тензотерморезисторов).
При использовании в активных плечах моста реактивных преобразователей возникают некоторые трудности с уравновешиванием плеч моста (требуется уравновесить как активную, так и реактивную составляющие их сопротивлений). Это делается подстроечными емкостями и резисторами, что несколько усложняет измерительную цепь. В целом же результаты и рекомендации, полученные для цепей постоянного тока, справедливы и для цепей переменного тока.
Приборы, построенные на принципе прямого преобразования, отличаются высоким быстродействием, простотой и надежностью, низкой стоимостью и малыми габаритами, что обусловило их широкое распространение. Однако в случае длинной цепи преобразователей результирующая погрешность, формирующаяся из погрешностей всех преобразователей цепи, может стать недопустимо большой.
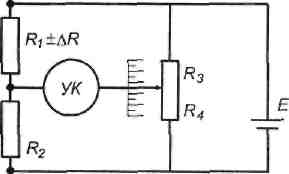
Рисунок 15.3 - Схема равновесного из мерительного моста
Метод
уравновешивания, или
компенсации,
предусматривает компенсацию сигнала
от датчика напряжением, управляемым
автоматически или вручную так, чтобы
ток в измерительной цепи стал равным
нулю. На рис. 3 приведена
простейшая схема измерительной
цепи для контроля сопротивления![]() датчика,
включенного в равновесный мост. Положение
движка реостата выбирается так, чтобы
ток через указатель и показание указателя
были равны нулю. По
положению движка можно судить о значении
сопротивления датчика. Контроль положения
движка осуществляется по шкале,
проградуированной в соответствии с
назначением прибора.
датчика,
включенного в равновесный мост. Положение
движка реостата выбирается так, чтобы
ток через указатель и показание указателя
были равны нулю. По
положению движка можно судить о значении
сопротивления датчика. Контроль положения
движка осуществляется по шкале,
проградуированной в соответствии с
назначением прибора.
Приборы, построенные на принципе компенсации, обладают высокой точностью и быстродействием, но отличаются высокой сложностью и стоимостью.