

28.Трение в роликовых направляющих качения. Приведенный коэффициент трения.
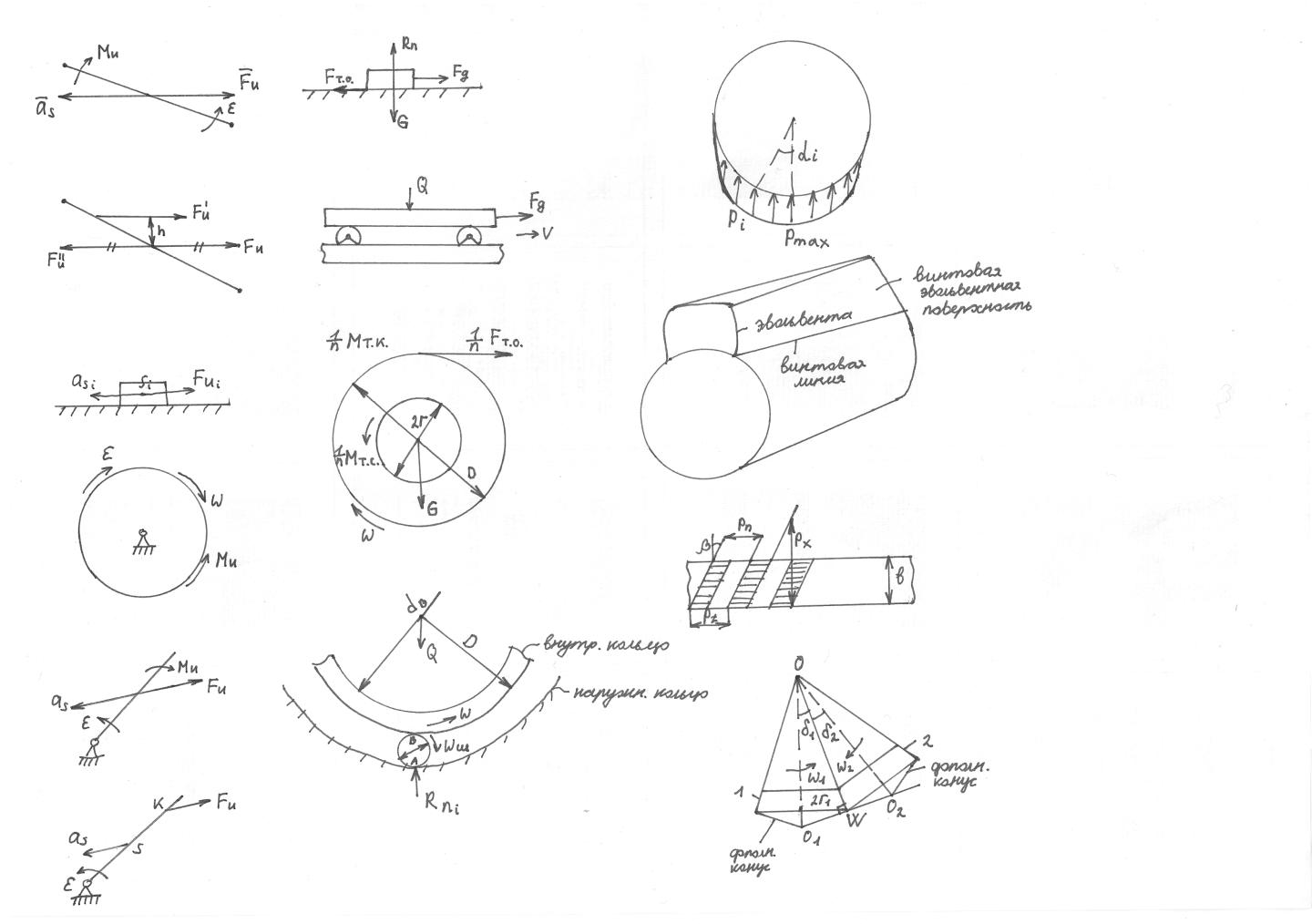
FД – движ. Сила; FТ.О. – сила трения покоя
МТ.К.=kQ
Общий момент трения скольжения МТ.С.=fвр(Q+nG)r; n – число роликов
Суммарный
момент трения
 Т∑=
МТ.К.+
МТ.С.=Q[k+r
fвр(1+ξ)];
ξ=nG/Q;
ξ – пренебречь.
Т∑=
МТ.К.+
МТ.С.=Q[k+r
fвр(1+ξ)];
ξ=nG/Q;
ξ – пренебречь.
FД определ. из равенства мощности.
FДV=MТ∑ω; V=ωD/2; FД=2 MТ∑/D={2Q[k+ r fвр(1+ξ)]}/D или FД=f’Q
f’={2Q[k+ r fвр(1+ξ)]}/D – приведенный коэффициент трнния
29.Трение в подшипниках качения.
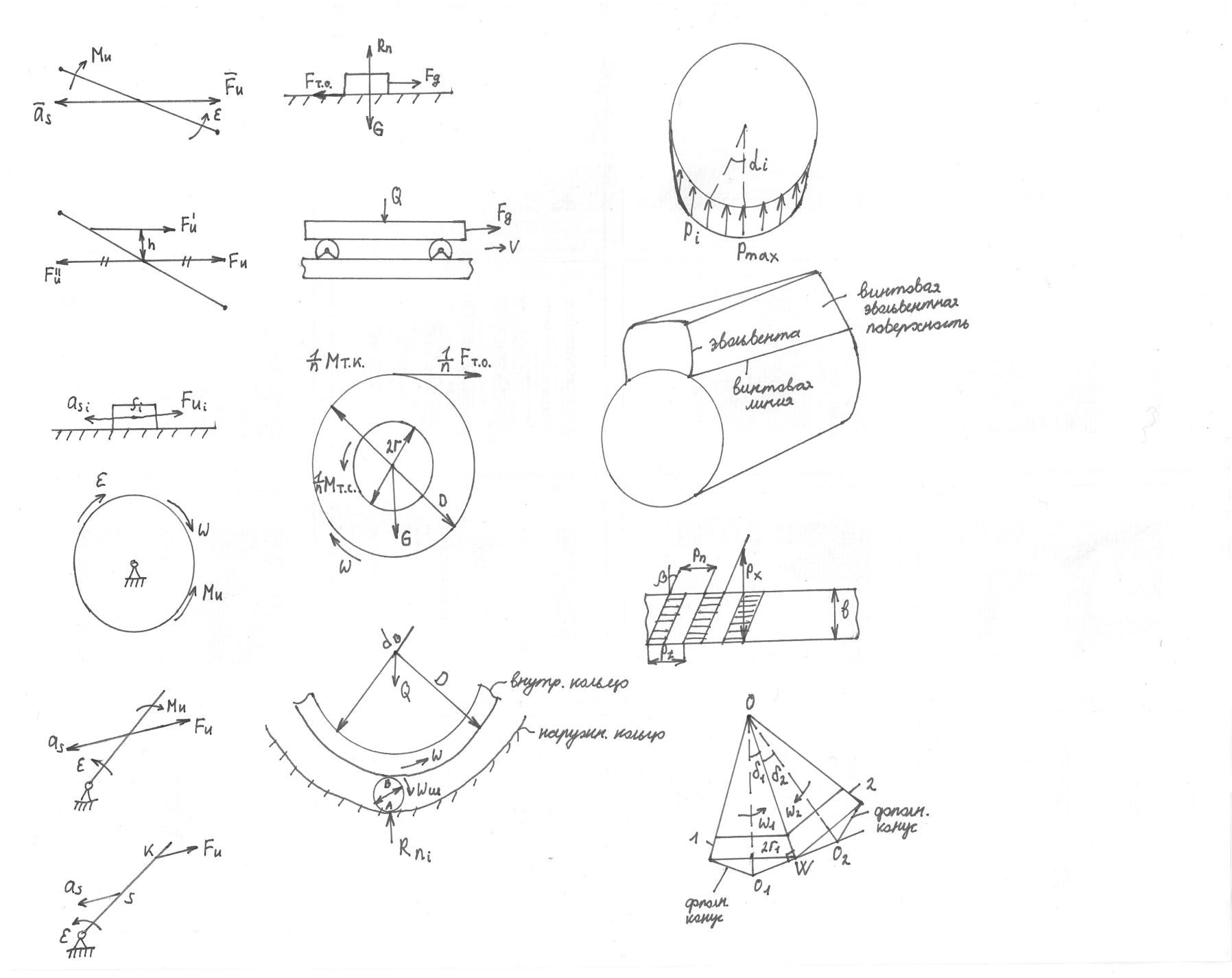
dВ – диаметр вала
Q – рад. Нагрузка
Ni=NA+NB=kRniωш+kRni(ω+ωш)
A – мгновенная центральная скорость
VВ=ωшd; VВ=ωD/2; ωш=ωD/2d
Ni= kRniω(1+D/d)
NТ.К.=∑Ni= kω(1+D/d)∑ Rni
Если
принять, что нагрузка между шариками
распределена по косинусоидальному
закону pi=pmax
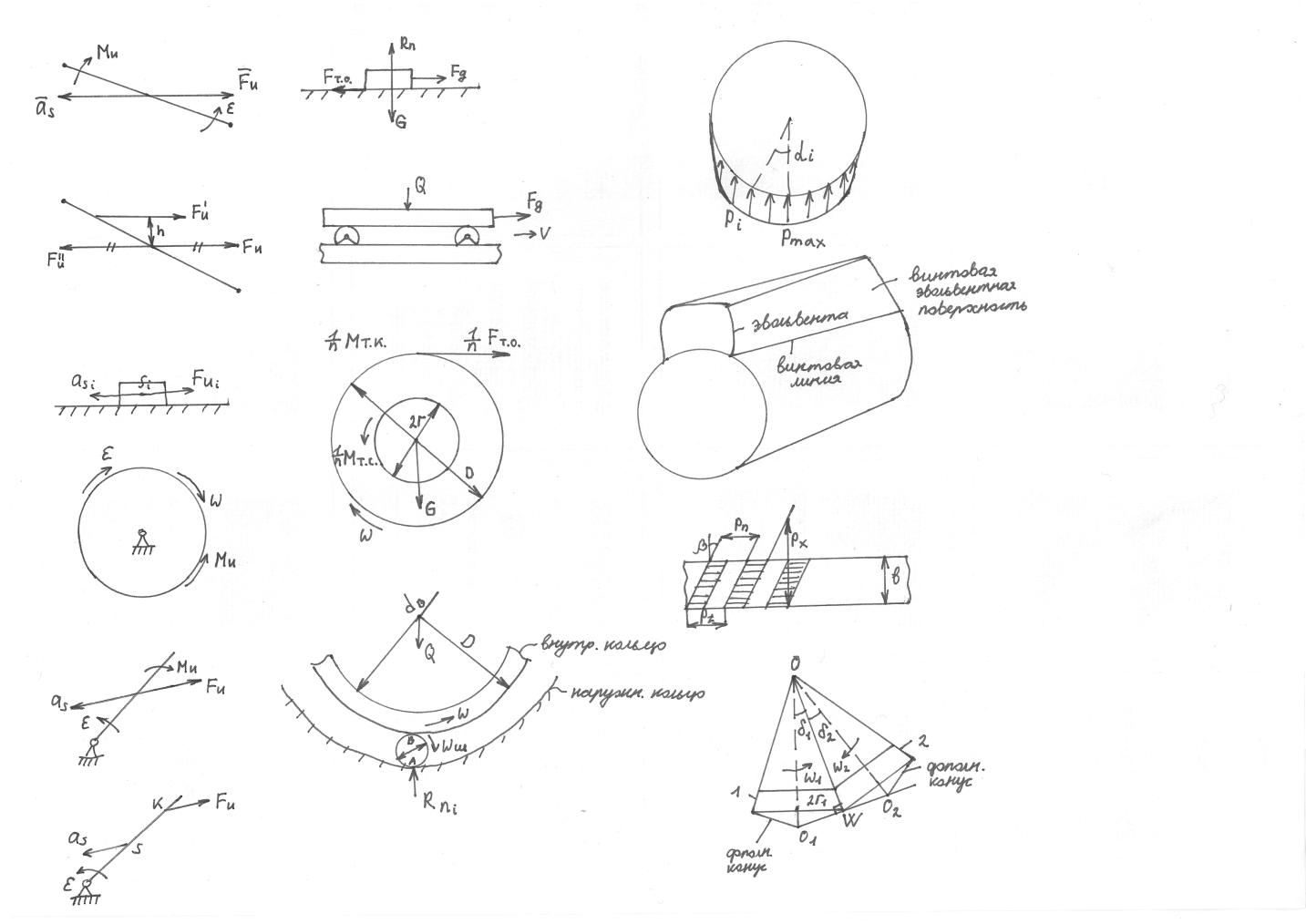
∑ Rni=4Q/π≈1,3Q; NТ.К=1,3kωQ(1+D/d); NТ.К= MТ.Кω;
MТ.К=1,3kQ(1+D/d) или MТ.К=f ’Q rВ
f ’=[1,3k(1+D/d)]/ rВ – приведенный коэффициент трения
для подшипников качения f ’=0,001…0,004
для подшипников скольжения f ’=0,1…0,2
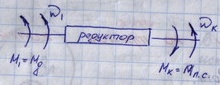
30.Механический кпд и коэффициент потерь. Кпд при последовательном и параллельном соединении механизмов.
 -
цикловой КПД; АП.С.
– работа сил полезного сопротивления;
Аg
– работа движущих сил.
-
цикловой КПД; АП.С.
– работа сил полезного сопротивления;
Аg
– работа движущих сил.
За
цикл:
 -
коэффициент потерь.
-
коэффициент потерь.
АВ.С. – работа сил вредного сопротивления.

Вместо
работ можно брать средние мощности:
Иногда
определяется мгновенный КПД:
N1 – мощность на ведущем звене.
NK – мощность на ведомом звене.
Эти мощности определяются без учета сил инерции.
Для механизмов передач вращательного движения (редуктор) цикловой и мгновенный КПД совпадают.
Мгновенный КПД можно представить:

 -
движущий момент, определяемый без учета
трения.
-
движущий момент, определяемый без учета
трения.
 - отношение движущего момента в идеальном
механизме и движущего момента в реальном
механизме. При прямолинейном движении:
- отношение движущего момента в идеальном
механизме и движущего момента в реальном
механизме. При прямолинейном движении:
КПД при последовательном и параллельном соединении механизмов.
Последовательное соединение:
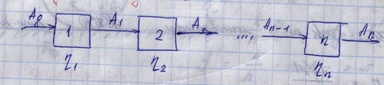

Но
 - общий КПД.
- общий КПД.
 - общий КПД.
- общий КПД.
Общий КПД всегда меньше самого низкого КПД одного механизма.
2) Параллельное соединение:
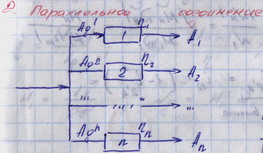

 -
коэффициенты распределения энергии.
-
коэффициенты распределения энергии.

или
 ;
;
 - общий КПД равен КПД каждого механизма.
- общий КПД равен КПД каждого механизма.
31.Кпд передачи “Винт - гайка”. Явление самоторможения.
Передачу “винт - гайка” приближенно можно представить в виде ползуна, движущегося по наклонной плоскости, которая получается путем развертки средней винтовой линии резьбы на плоскость.
 -
угол наклона средней винтовой линии.
-
угол наклона средней винтовой линии.
- угол трения.
h – ход винтовой линии.
p – шаг резьбы.
z – число заходов.
 ;
;
При
прямом ходе винт преодолевает осевую
нагрузку
 :
:
F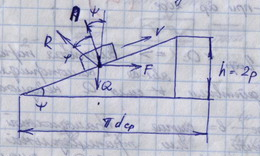 – движущая сила.
– движущая сила.
R – полная реакция.
При равномерном движении:

Силовой треугольник:

 или
или


При


 -
КПД при прямом ходе.
-
КПД при прямом ходе.
При обратном ходе винт движется под действием осевой силы (опускание ползуна)
F – тормозящая сила, необходимая для равномерного опускания.
Силы трения изменяют свое направление на противоположное:
 -
КПД при обратном ходе.
-
КПД при обратном ходе.
Если
 ,
то получается, что КПД при обратном ходе
,
то получается, что КПД при обратном ходе
 - винтовая пара является самотормозящей
– движение под действием любой силы
невозможно.
- винтовая пара является самотормозящей
– движение под действием любой силы
невозможно.
Формулы (1) и (2) используются в случае прямоугольной резьбы.
П ри
треугольной или трапецеидальной резьбе
полагают, что движение гайки аналогично
движению клинового ползуна.
ри
треугольной или трапецеидальной резьбе
полагают, что движение гайки аналогично
движению клинового ползуна.
 -
приведенный
угол трения.
-
приведенный
угол трения.

Метрическая
резьба
 :
:

Формулы (1) и (1) используются и для червячной передачи. При передаче движения от червяка на колесо:
