37.Статическое уравновешивание масс плоских рычажных механизмов (методом статического размещения масс).
Для
механизмов в целом, чаще всего,
ограничиваются статическим уравновешиванием,
когда главный вектор сил инерции
 .
.
S
– общий центр масс или центр всего
механизма. Для статического уравновешивания
S
должен быть неподвижным, т.е.
 и соответственно
и соответственно


Используем метод статического размещения масс. Твердое тело заменим точечной массой, которая обладает той же массой и тем же расположением центра масс, что и заменяемое тело.
 и
и
 в точках А и В
в точках А и В
 в
тачках А и О
в
тачках А и О
 -
система уравнений для шатуна
-
система уравнений для шатуна
 – система
уравнений для кривошипа
– система
уравнений для кривошипа
 ;
;
 ;
;
 ;
;
 - вращательные массы
- вращательные массы
 – поступательное
движущие массы
– поступательное
движущие массы
В
точке D
установлен противовес массой
 так, чтобы центр масс
так, чтобы центр масс
 оказался в точке А.
оказался в точке А.

В
точке С установлен еще один противовес
 так, чтобы центр масс
и
так, чтобы центр масс
и
 оказался в точке О.
оказался в точке О.

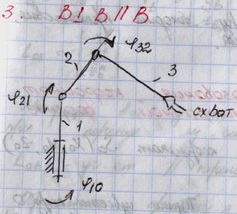
Общий центр масс механизма оказывается в неподвижной точке О, тем самым задача статического уравновешивания выполнена. Рассмотренное решение является конструктивно неудачным и применяется редко. Чаще применяется приближенное уравновешивание. Например, уравновешивание только вращающихся масс.
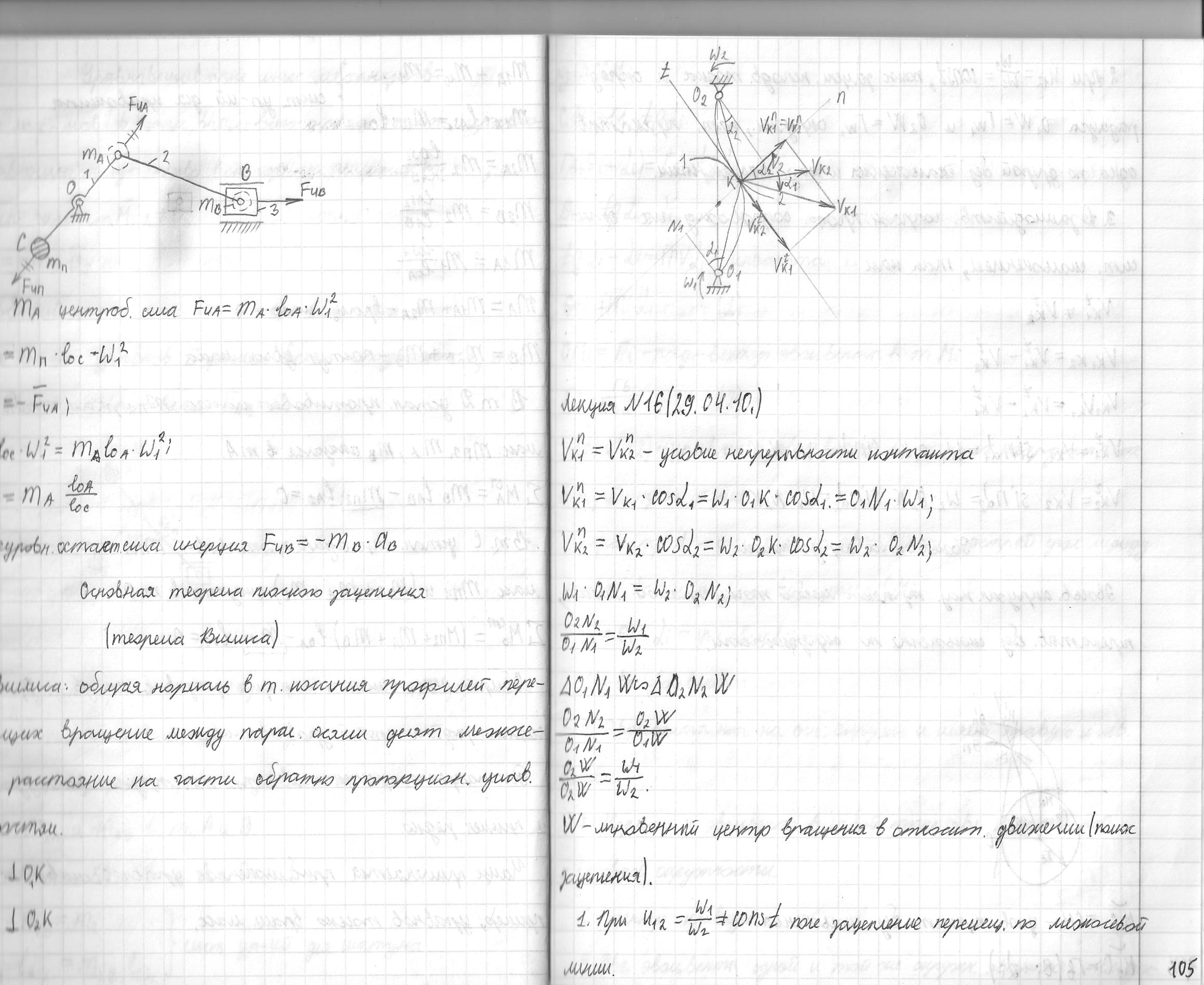
От
 центробежная сила
центробежная сила

 ;
;
 ;
;
 ;
;
 ;
;
Неуравновешенной
остается сила инерции

38.Манипулятор. Переносные и ориентирующие движения. Зона обслуживания. Угол и коэффициент сервиса. Маневренность манипуляторов.
Манипулятор – механическое устройство, предназначенное для воспроизведения рабочих функций рук человека.
В основе манипуляторов незамкнутые кинематические цепи с несколькими степенями свободы.
Каждая степень свободы управляется отдельным приводом.
Все механические движения манипуляторов делятся на: 1) Переносные. 2) Ориентирующие.
Переносные движения обеспечивают перемещение объекта манипулирования в требуемую точку пространства, а ориентирующие движения выполняют его ориентацию нужным способом.
Рабочая
зона манипулятора будет объемной
(пространственной), если число переносных
степеней свободы
 .
Число ориентирующих степеней свободы
обычно
.
Число ориентирующих степеней свободы
обычно
 .
.
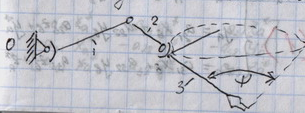
1)
Манипулятор

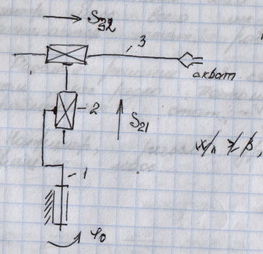
Переносное движение и степени свободы:
 -
обобщенные координаты;
-
обобщенные координаты;
 - степени свободы.
- степени свободы.
2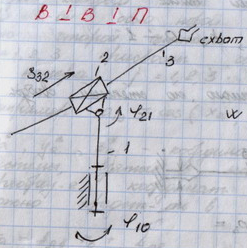 )
)
 3)
3)

Часть рабочей зоны, в которой рука манипулятора выполняет свои функции, называется зоной обслуживания.
Для каждой точки зоны обслуживания существует такой телесный (пространственный) угол , внутри которого схват может подойти к этой точке.
- угол сервиса.
 -
коэффициент сервиса в данной точке.
-
коэффициент сервиса в данной точке.
Маневренность манипулятора – число степеней свободы при неподвижном схвате.


39.Метод преобразования координат точек и вектора в матричной форме. Составление матриц преобразования координат.
М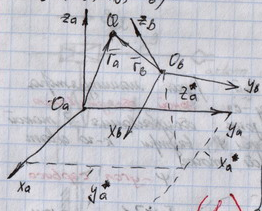 етод
преобразования координат в матричной
форме.
етод
преобразования координат в матричной
форме.
Рассмотрим две системы координат:

Пусть известны координаты точки “Q” в системе
 ,
тогда координаты этой же точки
,
тогда координаты этой же точки
в
системе
 определяются
по формуле:
определяются
по формуле:

Здесь
каждый коэффициент
 - косинус угла между
- косинус угла между
 -
й осью новой системы
и
-
й осью новой системы
и
 -
й осью старой системы
-
й осью старой системы
 ,
причем номера
,
причем номера
 присвоены соответственно
присвоены соответственно
осям
 ,
а номера
,
а номера
 - соответственно осям
- соответственно осям
 .
.
Например:

 -
координаты начала старой системы
в
новой системе
.
-
координаты начала старой системы
в
новой системе
.
Преобразование координат точки по формулам (1) можно двумя способами:
1) С помощью матриц третьего порядка.
2) С помощью матриц четвертого порядка.

Матрица
 учитывает поворот координатных осей
из системы “b”
в систему “a”.
учитывает поворот координатных осей
из системы “b”
в систему “a”.
Матрица – столбец учитывает параллельный перенос осей.
 -
обратное преобразование.
-
обратное преобразование.

2)


После перемножения матриц по формуле (2) получается выражение (1) и тождество 1 = 1.
Преобразование
координат векторов выполняется с помощью
матриц поворота
 ,
так как проекции вектора не зависят от
параллельного переноса осей.
,
так как проекции вектора не зависят от
параллельного переноса осей.
Часто
для перехода из системы
 используются
промежуточные системы координат
используются
промежуточные системы координат

Сравнивая (3) и (4), получаем:

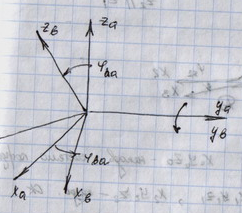
Составим выражения матриц для одноосных поворотов.
1)
Поворот вокруг общей оси
 :
:

м
2)
Поворот вокруг общей оси
 :
:

3) Поворот вокруг общей оси

Составить
преобразование из