21.Метод кинетостатики. Определение сил инерции звеньев.
Силовой анализ механизма выполняется методом кинетостатики, который состоит в том, что уравнения движения записываются в форме уравнений равновесия или статики. Для этого к каждому подвижному звену механизма наряду с реально действующими активными силами и реакциями связи прикладываются силы инерции, после чего, на основании принципа Даламбера, составляются уравнения равновесия в следующем виде:
1)
Векторная сумма всех сил равна нулю.
 или
или

2)
Сумма моментов
Силы
инерции звена, совершающего
плоскопараллельное движение и имеющего
плоскость симметрии, параллельную
плоскости движения, приводятся к главному
вектору
 ,
приложенному в центре масс “S”
и главному моменту
,
приложенному в центре масс “S”
и главному моменту
 :
:


 -
центральный момент инерции.
-
центральный момент инерции.
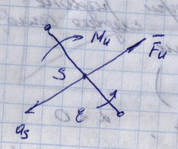
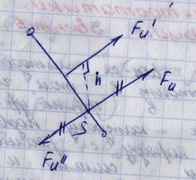
Силу
и момент
можно
заменить одной силой
 ,
приложенной на расстоянии “H”
от “S”:
,
приложенной на расстоянии “H”
от “S”:
 -
пара сил
-
пара сил

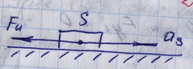
Рассмотрим частные случаи.
1) Поступательное движение звена.

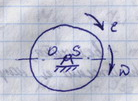
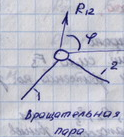
2) Вращательное движение звена вокруг оси, проходящей через центр масс.

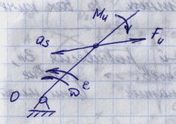
3) Вращательное движение вокруг оси, не проходящей через центр масс:

22.Условие статической определимости плоских кинематических цепей.
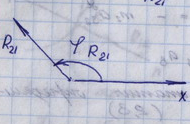
Рассмотрим действие реакций в различных кинематических парах без учета трения:
1) Вращательная пара. 2) Поступательная пара. 3) Высшая пара.
R12 – реакция на звено 1
с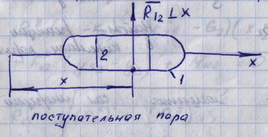
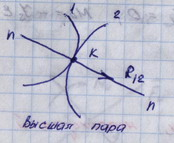
 о
стороны звена 2.
о
стороны звена 2.

Во
вращательной паре неизвестны величина
и направление реакций, а точка приложения
известна (центр шарнира) – неизвестна.
В поступательной паре неизвестны
величина и точка приложения, а направление
известно. В высшей паре неизвестна
величина, а точка приложения и направление
известны. Таким образом, общее число
неизвестных равно:
 .
Общее число возможных уравнений
равновесия: 3n,
n
– число подвижных звеньев. Следовательно,
условие статической определимости в
кинематической цепи имеет вид:
.
Общее число возможных уравнений
равновесия: 3n,
n
– число подвижных звеньев. Следовательно,
условие статической определимости в
кинематической цепи имеет вид:
 Для рычажных механизмов pB
= 0, тогда условие:
Для рычажных механизмов pB
= 0, тогда условие:
 Этому условию удовлетворяют структурные
группы (группы Ассура).
Этому условию удовлетворяют структурные
группы (группы Ассура).
23.Кинетостатический силовой анализ плоских рычажных механизмов аналитическим методом.
Пример.Задано:Закон
движения начального звена
 ;Внешняя
сила:
;Внешняя
сила:
 ;Силы
тяжести звеньев:
;Силы
тяжести звеньев:

О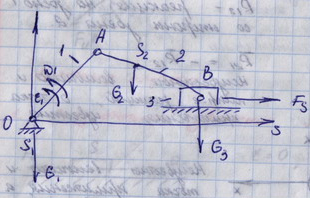 пределить:
Реакции в кинематических парах
(взаимодействие между звеньями)
пределить:
Реакции в кинематических парах
(взаимодействие между звеньями)
Решение.
Определяем силы и моменты сил инерции:
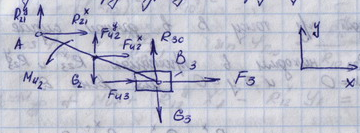
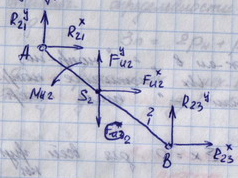
Отделяем от механизма статически определимую структурную группу (2,3):Силы и моменты показываем в положительном положении кроме сил тяжести. Их истинное направление укажет знак “+” или “-” после числовых расчетов.
 находим
из уравнения.
находим
из уравнения. для всей группы.
для всей группы.
Составляем
сумму проекций на ось Х:
 находим
из уравнения:
находим
из уравнения: для звена “2”.
для звена “2”.
 находим
из уравнения:
находим
из уравнения:
 -
для всей группы.
-
для всей группы.
В данном случае проходит через т. В.
Реакцию находим
в проекциях
находим
в проекциях
 и
и
 из
уравнений:
и
- для звена “2”.
из
уравнений:
и
- для звена “2”.
Рассчитаем начальное звено “1”:
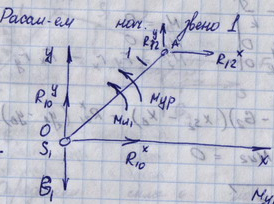

Мур
– уравновешивающий (движущий) момент,
который действует со стороны привода
и обеспечивает принятый закон движения.
Имеем:
Статически
определимая задача:
Три
неизвестных -
 Три
уравнения равновесия.
Три
уравнения равновесия.