

11.Виды зубчатых механизмов с подвижными осями вращения. Формула Виллиса для дифференциальных и планетарных механизмов.
Сюда относятся механизмы, в составе которых имеется хотя бы одно колесо с перемещающейся в пространстве осью вращения – сателлит.
Различают:
1) Дифференциальные механизмы.
2) Планетарные механизмы.
3) Замкнутые механизмы.
1 и 3 – центральные колеса
Н – водило
2 – сателлит
W – число степеней свободы

Механизм имеет два входа и один выход (или один вход и два выхода)
Получим формулу, связывающую угловые скорости звеньев в дифференциальном механизме.
Метод
обращения движения: мысленно сообщаем
всем колесам и водилу угловую скорость
 дополнительную. Тогда скорость в
обращенном движении:
дополнительную. Тогда скорость в
обращенном движении:

Формула Виллиса:

 -
передаточное отношение обращенного
механизма
-
передаточное отношение обращенного
механизма
В общем виде:

12.Классификация сил действующих в машинах.
В машинах действуют следующие основные группы сил:
1) Движущие силы – совершают положительную работу и приложены к ведущим звеньям.
2) Силы технологического (полезного) сопротивления – совершают отрицательную работу и приложены к ведомым звеньям.
3) Силы тяжести и упругости звеньев – совершают как положительную, так и отрицательную работу. За кинематический цикл их работа равна нулю.
4) Силы взаимодействия между звеньями – реакции в кинематических парах – их нормальные составляющие работы не производят (реакции идеальных связей), касательные составляющие являются силами трения и обычно относятся к вредным сопротивлениям.
5) Расчетные силы – силы инерции – для учета неравномерности.
13.Динамическая модель машины с одной степенью свободы. Приведение сил и масс.
Что бы упростить решение задач динамики, машина заменяется динамической моделью в виде вращающегося звена приведения, к которому приложен приведенный момент сил МП, и которое имеет приведенный момент инерции JП (относительно оси вращения).
МП и JП должны определяться так, чтобы в любой момент:
 ,
где
,
где
 - кинематические характеристики
начального звена исполнительного
механизма. Если начальное звено совершает
поступательное движение, то динамическая
модель представляет собой точку
приведения, к которой приложена
приведенная сила FП
и которая имеет приведенную массу mП.
- кинематические характеристики
начального звена исполнительного
механизма. Если начальное звено совершает
поступательное движение, то динамическая
модель представляет собой точку
приведения, к которой приложена
приведенная сила FП
и которая имеет приведенную массу mП.
14.Уравнения движения звена приведения в энергетической и дифференциальной формах.
Согласно теореме об изменении кинетической энергии:
 (1)
(1)
 -
кинетическая энергия машины в начальном
и конечном положениях.
-
кинетическая энергия машины в начальном
и конечном положениях.
 -
сумма работ всех сил на рассматриваемом
перемещении.
-
сумма работ всех сил на рассматриваемом
перемещении.
 ,
где:
,
где:
 -
работа движущих сил
-
работа движущих сил
 -
работа сил сопротивления
-
работа сил сопротивления
Используя приведение сил и масс, уравнение (1) можно записать следующим образом:
 -
кинетическая энергия звена приведения
-
кинетическая энергия звена приведения
 (2) – уравнение движения звена приведения
в энергетической форме.
(2) – уравнение движения звена приведения
в энергетической форме.
Согласно теореме об изменении кинетической энергии в дифференциальной форме:

Окончательно имеем
 (3)
– уравнение движения приведенного
звена в дифференциальной форме.
(3)
– уравнение движения приведенного
звена в дифференциальной форме.
15.Режимы движения машин. Коэффициент неравномерности движения.
В общем случае движения машины наблюдаются в следующих стадиях:
1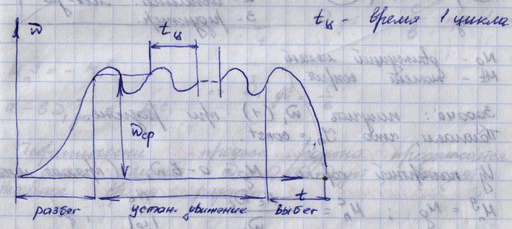 )
Разбег (разгон)
)
Разбег (разгон)
2) Установившееся движение
3) Выбег
1)
Так как
 ,
то получаем:
,
то получаем:
 ,
ω – возрастает.
,
ω – возрастает.
2) ω – периодическая функция
Времени (в частном случае - касательная):
 -
за цикл.
-
за цикл.
 или
или

 -
коэффициент неравномерности движения
-
коэффициент неравномерности движения
3)
 ω – убывает.
ω – убывает.