

35.Динамическое и статическое уравновешивание вращающихся звеньев. Виды неуравновешенности, их оценка и способы устранения. Балансировка.
Уравновешивание масс состоит в устранении переменных реакций на опоры от сил инерции.
Для полного устранения этих реакций главный вектор и главный момент инерции должны быть равны нулю.
 -
динамическое уравновешивание.
-
динамическое уравновешивание.
 -
статическое уравновешивание.
-
статическое уравновешивание.

 -
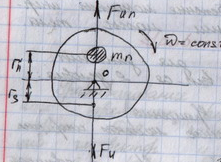
смещение центра масс “S”
относительно оси вращения.
-
смещение центра масс “S”
относительно оси вращения.
При
 :
:

 -
центральные моменты инерции массы.
-
центральные моменты инерции массы.
Из формул (1) и (2) следует, что для динамического уравновешивания должны выполняться два условия:
1)

2)

При выполнении этих двух условий ось вращения совпадает с одной из главных центральных осей инерции тела.
Рассмотрим различные виды неуравновешенности:
1) Статическая неуравновешенность:

В результате:
Мерой статической неуравновешенности является дисбаланс:

 (
при
(
при
 дисбаланс
– сила инерции)
дисбаланс
– сила инерции)
Для
устранения статической неуравновешенности
надо в направлении, противоположном
центру масс поместить корректирующий
груз (противовес), масса которого
 определяется
из условия, что:
определяется
из условия, что:

После установки противовеса центр масс “S” сместится
на ось вращения “O”.Часто вместо установки
дополнительной массы высверливают такую же массу
с диаметрально противоположной стороны. Статическое
уравновешивание достаточно для узких деталей, у которых
размер вдоль оси вращения мал по сравнению с остальными
размерами.
2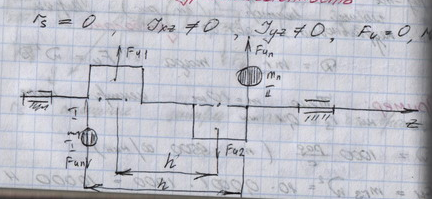 )
Моментная неуравновешенность:
)
Моментная неуравновешенность:

 -
пара сил с моментами
-
пара сил с моментами

Мерой неуравновешенности служит
момент дисбаланса:
Так как пару сил можно уравновесить
только парой сил , то моментная
н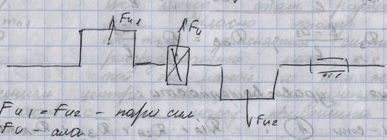 еуравновешенность
устраняется двумя
еуравновешенность
устраняется двумя
одинаковыми противовесами, которые
создают
момент
 :ъ
:ъ
3) Динамическая неуравновешенность:

- пара сил
- сила.
Динамическую неуравновешенность к двум
статическим
в двух плоскостях, поэтому мерой
динамической неуравновешенности
являются два дисбаланса
 в двух плоскостях.
в двух плоскостях.
Следовательно, динамические неуравновешенности устраняются двумя различными противовесами в двух плоскостях.
Экспериментальное устранение неуравновешенностей называется балансировкой.
Балансировка выполняется как при помощи балансировочных станков, так и непосредственно во время эксплуатации.
Балансировка включает в себя определение значений и углов дисбаланса и изменение их корректировкой масс.
Различают статическую и динамическую балансировку.
Балансировка состоит из нескольких этапов:
Подготовка инструментов и балансируемого изделия
Определение параметров исходной вибрации
Расчёт корректирующих масс
Установка (или удаление) корректирующих масс
Повторение этапов 2-3 до тех пор, пока не будет достигнута требуемая точность балансировки
Завершение балансировки.
36.Уравновешивание нескольких масс, вращающихся на одном валу.
Для
механизмов в целом чаще всего ограничиваются
статическим уравновешиванием, когда


 ,
то есть общий центр масс всего механизма
должен быть неподвижным.
,
то есть общий центр масс всего механизма
должен быть неподвижным.
Рассмотрим задачу статического уравновешивания масс кривошипно – ползунного механизма:
С татическое
размещение масс.
татическое
размещение масс.
Согласно этому методу, твердое тело
заменяется системой сосредоточенных
(точечных) масс, которые обладают той
же массой и тем же расположением
центра масс, что и заменяемое тело.
Из этих уравнений находим:

В
результате в точке “A”
сосредоточена вращающаяся масса:

В точке “B” – поступательно движущаяся масса.
На
продолжении звена “2” в точке “C”
устанавливаем противовес, массу которого
 находим
из условия, что бы центр масс
находим
из условия, что бы центр масс
 ,
оказался точке “A”.
,
оказался точке “A”.

В
точке “D”
устанавливаем противовес, массу которого
находим из условия, что бы центр масс
 оказался в точке “O”.
оказался в точке “O”.
После установки обоих противовесов общий центр масс общий центр масс механизма окажется в неподвижной точке “O”, где достигается статическое уравновешивание.
Рассмотрим уравновешивание только вращающихся масс:

Уравновешивание только вращающихся масс:

Неуравновешенной
остается сила инерции от поступательно
движущейся массы
 :
:
