1.Механизм, машина. Звено, стойка. Входные и выходные звенья. Кинематические пары и их классификация. Кинематические цепи.
Механизм – это устройство, выполняющее преобразование движения одного или нескольких твердых тел в требуемое движение других твердых тел. Машина – это устройство, выполняющее механические движения для преобразования энергии, материалов или информации. Звено – это одно или несколько
жестко соединенных твердых тел, входящих в состав механизма. В каждом механизме имеется стойка (звено неподвижное или принимаемое за неподвижное). Входное звено – это звено, которому сообщается движение, преобразуемое механизмом в требуемое движение других звеньев.
Выходное звено – это звено, совершающее движение, для выполнения которого предназначен механизм. Кинематическая пара – это подвижное соединение двух соприкасающихся звеньев. Определение: кинематическая цепь – это система звеньев, связанных между собой кинематическими парами. Кинематические цепи могут быть: 1) Замкнутыми и незамкнутыми. 2) Плоскими и пространственными.
2.Число степеней свободы пространственных и плоских механизмов.
Числом степеней свободы механизма называется число независимых между собой параметров, однозначно определяющих положение всех звеньев относительно стойки. Число степеней свободы пространственного механизма:

Для плоских механизмов:
3.Пассивные (избыточные) связи и местные степени свободы в механизмах.
В некоторых механизмах имеются пассивные (избыточные) связи, которые дублируют ограничения, наложенные другими связями. В результате расчетное значение “W” получается меньше фактического.
4.Принцип Ассура образования плоских рычажных механизмов. Структурные группы и их классификация.
Структурные
группы и их классификация. Указанный
принцип состоит в том, что механизм
образуется из начального механизма и
одной или нескольких структурных групп.
Начальный механизм состоит из стойки
и одного или нескольких начальных
звеньев и имеет такое же число степеней
свободы, как и весь механизм (механизм
первого класса). Структурной группой
или группой Ассура называется такая
кинематическая цепь, которая после
присоединения ее внешними кинематическими
парами к стойке имеет нулевую подвижность
и которая не распадается на более простые
цепи, удовлетворяющие этому условию.
Согласно определению

5.Кинематический анализ плоских рычажных механизмов графическим методом.
Известны
размеры звеньев, положение механизма,
закон движения начального звена ( ).
).

 ;
;
 ;
;


 в
сторону
в
сторону

 находим
отрезок РА:
находим
отрезок РА:

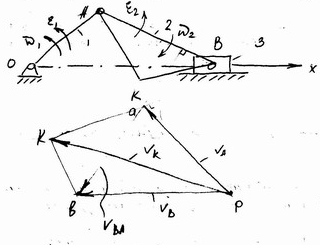
На основании теоремы о сложении скоростей в плоскопараллельном движении:
 ,
где
,
где
 - относительная скорость точки В при
вращении звена “2” вокруг точки “A”.
- относительная скорость точки В при
вращении звена “2” вокруг точки “A”.
 параллельна
оси “X”.
Это уравнение решаем графически путем
построения плана скоростей.
параллельна
оси “X”.
Это уравнение решаем графически путем
построения плана скоростей.
 ;
;

 .
.
Направление
 указывает вектор
указывает вектор

 ,
если перенести его точку “B”
и рассмотреть движение звена “2” вокруг
точки “A”.
,
если перенести его точку “B”
и рассмотреть движение звена “2” вокруг
точки “A”.


Решаем графически:

Свойства планов скоростей.
Отрезки, выходящие из полюса, выражают абсолютные скорости точки.
Отрезки,
соединяющие концы векторов абсолютных
скоростей, изображают относительные
скорости
 .
.
Теорема подобия: концы векторов абсолютных скоростей точек, принадлежащих одному звену, образуют фигуру, подобную соответствующей фигуре звена и сходственно с нею расположенную.
 и
и
 - подобны.
- подобны.
Сходственное расположение обозначает, что направление обхода одноименных контуров совпадают.
 -
по часовой стрелке.
-
по часовой стрелке.
Ускорение

 -
от т.”A”
к “O”
-
от т.”A”
к “O”
 в
сторону
в
сторону

 -
масштабный коэффициент.
-
масштабный коэффициент.
 ;
;

Построение:
Ускорение
точки “B”:

 от
“В” к “А”.
от
“В” к “А”.

 ;
;
![]() параллельно
“Х”.
параллельно
“Х”.
Решаем графически:
 Направление
Направление
![]() указывает
вектор
указывает
вектор
 ,
если перенести его в точку “B”
и рассмотреть движение точки “B”
относительно “A”.
,
если перенести его в точку “B”
и рассмотреть движение точки “B”
относительно “A”.
Точку
“k”
находим по свойству подобия, которое
справедливо и для плана ускорений. Для
этого методом засечек строим треугольник
 и
сходственно с ним расположенный:
и
сходственно с ним расположенный: