

31. Декомпозиция мп
Для облегчения понимания принципа работы микропроцессора, представим его в виде некоторого ПЦУ, состоящего из двух устройств: управляющего и операционного.
Операционное устройство производит приём операндов (чисел, участвующих в операции), их хранение и преобразование. Кроме того, операционный блок выдаёт во внешнюю среду результат преобразования, а в управляющее устройство - сигналы признаков.
Сигналы
признаков (флаги) несут информацию об
особенностях операндов и их отдельных
разрядов, а также особенностях
промежуточных и конечных результатов
обработки (например, равенство нулю,
чётность результата, переполнение
разрядной сетки и др.). Управляющее
устройство, в зависимости от кода
операции и сигналов признаков вырабатывает
сигналы управления, обеспечивающие
выполнение заданной операции. П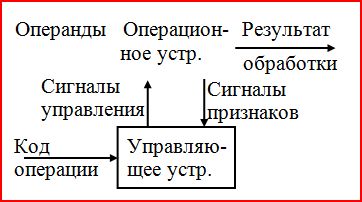 роцесс
функционирования МП во времени состоит
из последовательности элементарных
операций. Например, передача кодового
слова от одного узла МП к другому,
поразрядное инвертирование слова, сдвиг
и др. Элементарная операция выполняется
за один такт синхросигнала и называется
микрооперацией.
роцесс
функционирования МП во времени состоит
из последовательности элементарных
операций. Например, передача кодового
слова от одного узла МП к другому,
поразрядное инвертирование слова, сдвиг
и др. Элементарная операция выполняется
за один такт синхросигнала и называется
микрооперацией.
В течение такта может быть выполнено несколько микроопераций, но только если результат выполнения каждой из них не зависит от результатов выполнения остальных.
Элементарные преобразования информации производятся операционным блоком под воздействием управляющих сигналов.
Совокупность управляющих сигналов, обеспечивающих выполнение микроопераций в течение одного тактового интервала, называется микрокомандой. Последовательность микрокоманд, обеспечивающая выполнение данной операции (команды), называется микропрограммой.
Управляющее устройство может быть задано как автомат Мили или как автомат Мура, для которых функции переходов и выходов определяются заданной микропрограммой. В связи с этим управляющее устройство часто именуется микропрограммным или управляющим автоматом.
Для построения управляющего автомата используются принципы "жёсткой" (схемной) и "гибкой" (программируемой) логики.
32. Принцип аппаратного управления («жесткой» логики)
Типовой управляющий автомат с "жёсткой" логикой имеет следующую структуру:
В управляющем устройстве предусматривается ряд управляющих узлов (УУз), представляющих собой набор логических схем.
К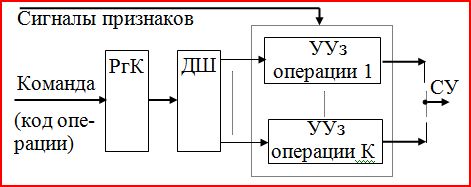 оманда,
поступающая из внешнего ОЗУ, фиксируется
в регистре команд (РгК) и с помощью
дешифратора команд (ДШ) включает
соответствующий управляющий узел.
оманда,
поступающая из внешнего ОЗУ, фиксируется
в регистре команд (РгК) и с помощью
дешифратора команд (ДШ) включает
соответствующий управляющий узел.
Управляющий узел вырабатывает определённую последовательность сигналов управления (СУ), обеспечивая выполнение данной операции операционным блоком.
В общем случае значения сигналов управления зависят от сигналов признаков, отражающих ход вычислительного процесса.
При таком способе построения управляющего автомата микропрограммы операций заложены в однажды выполненные соединения между логическими схемами управляющих узлов. Это означает, что набор команд или, иначе говоря, система команд фиксируется и соответствует числу выполняемых операций.
Поэтому такие микропроцессоры называются с "жёсткой" логикой управления.
Невозможность изменения системы команд после изготовления МП приводит к его узкой специализации. Вместе с тем МП с "жёсткой" логикой управления обеспечивает наивысшее быстродействие при заданной технологии изготовления.