

3) Кинематические цепи. Кинематические соединения.
Классификация кинематических пар. Кинематические пары (КП) классифицируются по следующим признакам:
1. По виду места контакта (места связи) поверхностей звеньев:
- низшие, в которых контакт звеньев осуществляется по плоскости или поверхности ( пары скольжения );
- высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием).
2. по относительному движению звеньев, образующих пару:
- вращательные;
-поступательные;
- винтовые;
- плоские;
-сферические.
3. по способу замыкания (обеспечения контакта звеньев пары):
- силовое (за счет действия сил веса или силы упругости пружины); - геометрическое (за счет конструкции рабочих поверхностей пары).
4. по числу условий связи, накладываемых на относительное движение звеньев ( число условий связи определяет класс кинематической пары );
5. по числу подвижностей в относительном движении звеньев.
Кинематическая цепь – это система звеньев, связанных между собой кинематическими парами.
Кинематические цепи могут быть: простыми (цепь, в которой каждое звено входит не более чем в 2 кинематические пары) и сложными ( цепь, в которой хотя бы одно из звеньев образует более 2 кинематических пар).
4) Механизмы плоские и пространственные. Число свободы механизма и его определение.
Плоский механизм - механизм, в котором все точки и звенья перемещаются в плоскостях параллельно между собой.
Пространственный механизм - механизм, в котором все точки и звенья перемещаются в плоскостях не параллельных между собой.
W число степеней свободы механизма. W=1 – для плоских механизмов, W не = 1 – для пространственных механизмов Определение числа степеней свободы механизма W=3*n-2*P5-P4- формула Чебышева для плоских механизмов. W- число степеней свободы n-число подвижных звеньев Р5-число пар 5-го класса механизма Р4-число пар 4-го класса механизма Для плоских механизмов если W не = 1 то допущена ошибка, либо присутствуют звенья, создающие лишнюю степень свободы.
5) Структурный синтез механизмов на примере плоского механизма.
О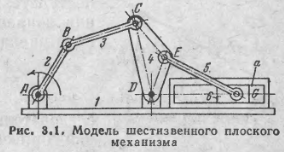 сновной
принцип образования механизмов был
впервые сформулирован в 1914 г. русским
ученым Л. В. Ассуром. Им был продолжен и
развит метод образования механизмов
путем последовательного
наслоения кинематических цепей,
обладающих определенными структурными
свойствами.
Этот метод
легко проследить, рассматривая какой
либо конкретный механизм, например
механизм, показанный на рис: 3.1. Этот
механизм имеет
пять подвижных звеньев, образующих семь
кинематических пар 5 класса. Следовательно,
по формуле
Чебышева (2.5)
число его
степеней
свободы равно W=3*n-2*P5=3*5-2*7=1
т. е. механизм, показанный на рис. 3.1,
обладает одной степенью свободы. Выберем
в качестве начального звено
2. Тогда
механизм будет состоять из начального
звена 2,
обладающего
одной степенью свободы,
стойки 1
и звеньев,
образующих кинематическую цепь, состоящую
из звеньев 3,
4, 5 и 6.
Процесс
образования
этого механизма можно представить как
последовательное присоединение к
начальному звену 2
и к стойке
1 кинематической
цепи, состоящей из звеньев З
и 4.
Тогда получим
четырехзвенный механизм АВCD,
обладающий
одной степенью
свободы. Далее к
звену 4
механизма
AВСD
и стойке 1
присоединим
кинематическую цепь, состоящую из звена
5 и
ползуна 6.
Тогда получим
шестизвенный механизм, обладающий также
одной степенью свободы.
Нетрудно теперь
установить определенную закономерность
процесса образования механизма. В самом
деле, любой механизм имеет одно неподвижное
звено (стойку).
У механизма,
показанного на рис. З.1, стойкой будет
звено 1. Далее,
механизм должен иметь число начальных
звеньев, равное числу его степеней
свободы. В
нашем случае механизм (рис. 3.1) обладает
одним начальным звеном 2,
так как
степень свободы механизма согласно
(3.1) равна W=1
Так как после присоединения звеньев
3, 4, 5 и
б число степеней свободы всего механизма
осталось равным W=1,
то, следовательно, кинематическая цепь,
состоящая из звеньев 3,
4, 5 и 6,
присоединенных к начальному звену 2
и стойке 1,
обладает
нулевой степенью свободы относительно
тех звеньев, к которым эта цепь
присоединяется. При последовательном
присоединении групп
необходимо
руководствоваться определенными
правилами. При образовании механизма
с одной степенью свободы первая группа
присоединяется свободными элементами
звеньев к начальному звену и к стойке.
Последующие группы могут присоединиться
к любым звеньям
полученного механизма только так, чтобы
звенья группы обладали
подвижностью
друг относительно
друга. Пусть,
например, мы
имеем
четырехзвенный механизм
АВСD
(рис. 3.2),
образованный
начальным
звеном 2,
стойкой 1
и группой,
состоящей из
звеньев 3 и
4. Следующая
группа, состоящая из звеньев 5
и 6,
может быть
присоединена
к любым двум разным звеньям механизма,
например к звеньям 3
и 4
(рис. 3.2), но
не к одному и тому же звену. Так, например,
если присоединить звенья 5
и 6
к одному и
тому же звену 3
(рис. 3.2). то
контур FEG’,
образованный
звеньями 3,
5 и 6, будет
жестким, т. е. будет фермой. Нетрудно
видеть, что
для того,
чтобы после
присоединения группы ее звенья имели
подвижность относительно тех звеньев,
к которым группа присоединена, необходимо,
чтобы замкнутый контур, образованный
звеньями группы и звеньями, к которым
она присоединится, был подвижным
контуром. Так, на
рис. 3.2 контур
G
сновной
принцип образования механизмов был
впервые сформулирован в 1914 г. русским
ученым Л. В. Ассуром. Им был продолжен и
развит метод образования механизмов
путем последовательного
наслоения кинематических цепей,
обладающих определенными структурными
свойствами.
Этот метод
легко проследить, рассматривая какой
либо конкретный механизм, например
механизм, показанный на рис: 3.1. Этот
механизм имеет
пять подвижных звеньев, образующих семь
кинематических пар 5 класса. Следовательно,
по формуле
Чебышева (2.5)
число его
степеней
свободы равно W=3*n-2*P5=3*5-2*7=1
т. е. механизм, показанный на рис. 3.1,
обладает одной степенью свободы. Выберем
в качестве начального звено
2. Тогда
механизм будет состоять из начального
звена 2,
обладающего
одной степенью свободы,
стойки 1
и звеньев,
образующих кинематическую цепь, состоящую
из звеньев 3,
4, 5 и 6.
Процесс
образования
этого механизма можно представить как
последовательное присоединение к
начальному звену 2
и к стойке
1 кинематической
цепи, состоящей из звеньев З
и 4.
Тогда получим
четырехзвенный механизм АВCD,
обладающий
одной степенью
свободы. Далее к
звену 4
механизма
AВСD
и стойке 1
присоединим
кинематическую цепь, состоящую из звена
5 и
ползуна 6.
Тогда получим
шестизвенный механизм, обладающий также
одной степенью свободы.
Нетрудно теперь
установить определенную закономерность
процесса образования механизма. В самом
деле, любой механизм имеет одно неподвижное
звено (стойку).
У механизма,
показанного на рис. З.1, стойкой будет
звено 1. Далее,
механизм должен иметь число начальных
звеньев, равное числу его степеней
свободы. В
нашем случае механизм (рис. 3.1) обладает
одним начальным звеном 2,
так как
степень свободы механизма согласно
(3.1) равна W=1
Так как после присоединения звеньев
3, 4, 5 и
б число степеней свободы всего механизма
осталось равным W=1,
то, следовательно, кинематическая цепь,
состоящая из звеньев 3,
4, 5 и 6,
присоединенных к начальному звену 2
и стойке 1,
обладает
нулевой степенью свободы относительно
тех звеньев, к которым эта цепь
присоединяется. При последовательном
присоединении групп
необходимо
руководствоваться определенными
правилами. При образовании механизма
с одной степенью свободы первая группа
присоединяется свободными элементами
звеньев к начальному звену и к стойке.
Последующие группы могут присоединиться
к любым звеньям
полученного механизма только так, чтобы
звенья группы обладали
подвижностью
друг относительно
друга. Пусть,
например, мы
имеем
четырехзвенный механизм
АВСD
(рис. 3.2),
образованный
начальным
звеном 2,
стойкой 1
и группой,
состоящей из
звеньев 3 и
4. Следующая
группа, состоящая из звеньев 5
и 6,
может быть
присоединена
к любым двум разным звеньям механизма,
например к звеньям 3
и 4
(рис. 3.2), но
не к одному и тому же звену. Так, например,
если присоединить звенья 5
и 6
к одному и
тому же звену 3
(рис. 3.2). то
контур FEG’,
образованный
звеньями 3,
5 и 6, будет
жестким, т. е. будет фермой. Нетрудно
видеть, что
для того,
чтобы после
присоединения группы ее звенья имели
подвижность относительно тех звеньев,
к которым группа присоединена, необходимо,
чтобы замкнутый контур, образованный
звеньями группы и звеньями, к которым
она присоединится, был подвижным
контуром. Так, на
рис. 3.2 контур
G СFЕ
будет обладать
подвижностью. Нетрудно видеть, что для
того, чтобы
такой контур
обладал подвижностью, необходимо, чтобы
звенья контура входили бы не
менее чем
в четыре
кинематические
пары (пары F,
Е,G
и С на рис.
3.2).
СFЕ
будет обладать
подвижностью. Нетрудно видеть, что для
того, чтобы
такой контур
обладал подвижностью, необходимо, чтобы
звенья контура входили бы не
менее чем
в четыре
кинематические
пары (пары F,
Е,G
и С на рис.
3.2).