

41) Определение сил инерции и моментов инерции при вращательном, поступательном, и сложном движениях. Принцип Даламбера.
Если звено движется поступательно с некоторым ускорением, то его сила инерции Fи равна
Fи = —m*aS (12.4)
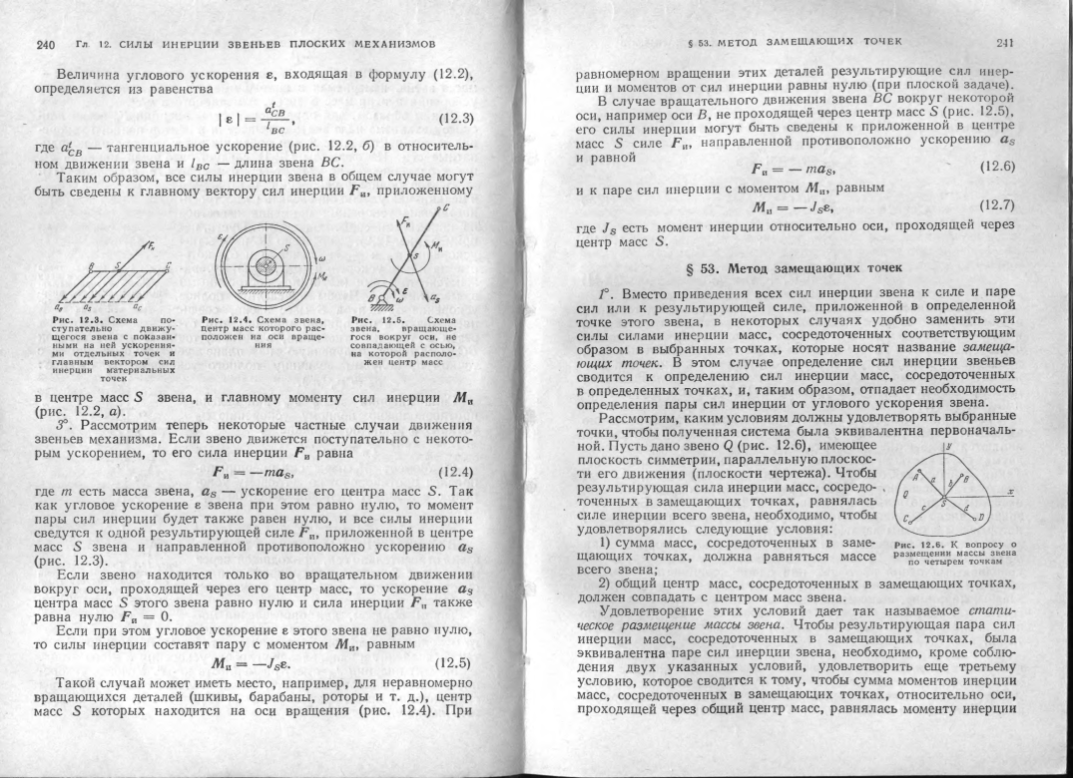
где т есть масса звена, as — ускорение его центра масс S. Так как угловое ускорение е звена при этом равно нулю, то момент пары сил инерции будет также равен нулю, и все силы инерции сведутся к одной результирующей силе Fи, приложенной в центре масс S звена и направленной противоположно ускорению as (рис. 12.3).
Если звено находится только во вращательном движении вокруг оси, проходящей через его центр масс, то ускорение aS центра масс 5 этого звена равно нулю и сила инерции Fu также равна нулю Fu = 0.
Если при этом угловое ускорение 8 этого звена не равно нулю, то силы инерции составят пару с моментом Ми, равным
Ми = — Js*ε (12.5)
Такой случай может иметь место, например, для неравномерно вращающихся деталей (шкивы, барабаны, роторы и т. д.), центр масс S которых находится на оси вращения (рис. 12.4). При равномерном вращении этих деталей результирующие сил инерции и моментов от сил инерции равны нулю (при плоской задаче).
В случае вращательного движения звена ВС вокруг некоторой оси, например оси В, не проходящей через центр масс S (рис. 12.5), его силы инерции могут быть сведены к приложенной в центре масс S силе Fи , направленной противоположно ускорению as и равной
Fи = —m*aS (12.6)
и к паре сил инерции с моментом Л1И, равным
Ми = — Js*ε (12.7)
где Js есть момент инерции относительно оси, проходящей через центр масс S.
Д'Аламбера принцип — в физике: один из основных принципов динамики, согласно которому, если к заданным (активным) силам, действующим на точки механической системы, и реакциям наложенных связей присоединить силы инерции, то получится уравновешенная система сил.Назван по имени франц. Учёного Ж. Д'Аламбера. Из Д. п. следует, что для каждой i-той точки системы Fi + Ni + Ji = 0, где Fi — действующая на эту точку активная сила, Ni — реакция наложенной на точку связи, Ji — сила инерции, численно равная произведению массы mi точки на её ускорение wi (Ji = miwi) и направленная противоположно этому ускорению. Д. п. позволяет применить к решению задач динамики более простые методы статики, поэтому им широко пользуются в инженерной практике. Особенно удобно им пользоваться для определения реакций связей в случаях, когда закон происходящего движения известен или найден из решения соответствующих уравнений
43) Теорема Жуковского о жестком рычаге
 Одним
из способов определения приведенной
силы Fпр
является способ, предложенный проф.
Н.Е. Жуковским. Уравнение, из которого
может быть найдена Fпр,
основано
на равенстве мощностей:
F∑пр·VA·cos(F∑пр VA)=∑Fi·Vi·cos(Fi Vi).
Одним
из способов определения приведенной
силы Fпр
является способ, предложенный проф.
Н.Е. Жуковским. Уравнение, из которого
может быть найдена Fпр,
основано
на равенстве мощностей:
F∑пр·VA·cos(F∑пр VA)=∑Fi·Vi·cos(Fi Vi).
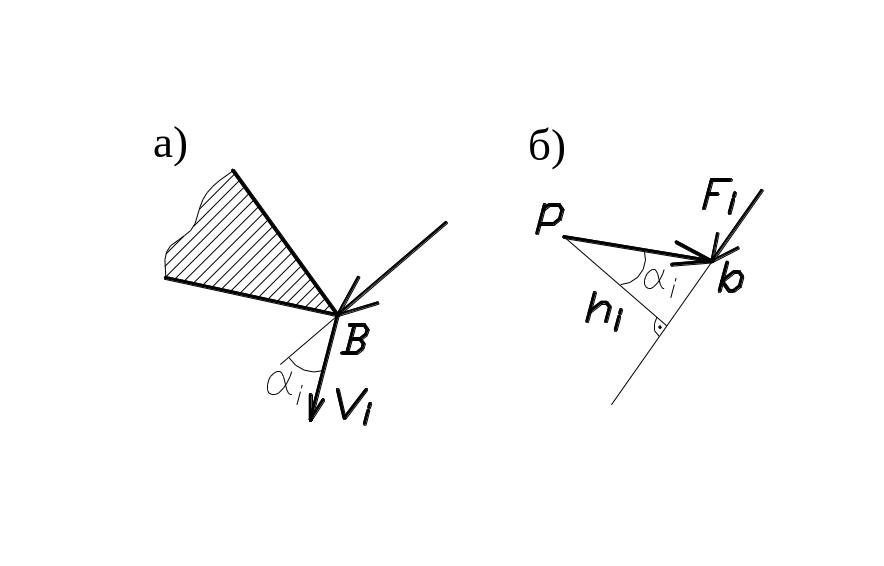
Рассмотрим какое-либо звено механизма, в т. В которого приложена сила Fi под углом αi к вектору скорости Vi этой точки (рис.25, а). Мощность силы Fi равна:
Pi=Fi·Vi·cosαi. Если вектор скорости т. В (план скоростей) повернуть на Рис.25 90˚ и силу Fi приложить к концу вектора (в т. «b»), сохранив ее направление, то момент этой силы относительно полюса «p» будет равен (рис.25, б): Mi=Fi·hi=Fi·Vi·cosαi=Pi,
т.е. равен мощности силы Fi. Таким образом, Fi можно найти, повернув на 90˚ план скоростей и приложив к нему все внешние силы, включая силы инерции, в соответствующих точках и сохраняя их направления. Тогда из уравнения моментов такого рычага: F∑пр·hпр=∑Fi·hi, получим: F∑пр=∑Fi·hi/hпр, где hi и hпр – кратчайшие расстояния от полюса плана скоростей до линии действия i-ой и приведенной сил. Повернутый на 90˚ план скоростей с приложенными к нему силами называется жестким рычагом Жуковского. Величина Fпр или Мпр зависит от положения механизма, поэтому можно построить диаграмму, например, Fпр(φ), являющуюся функцией положения звена приведения. Для этого необходимо последовательно определить значения Fпр методом рычага Жуковского для целого ряда положений механизма в пределах цикла (F1пр, F2пр,…) и отложить их на диаграмме (рис.26).
Приведенная сила F∑пр или момент М∑пр характеризует реакцию механизма на движение его входного звена по определенному закону, задаваемому двигателем. Сила или момент, равные по величине приведенной силе или моменту, но противоположные им по направлению называется
уравновешенной силой Fур или моментом Мур. Эта сила или момент развивается двигателем и обеспечивает заданное движение входного звена.
Если к рычагу Жуковского приложить все внешние силы, включая силы инерции, а также Fур, то его можно рассматривать в равновесии, из условия которого: Fур•hур+∑Fi•hi=0 можно определить неизвестную Fур, а также найти мощность двигателя Pдв, требуемую для получения заданного движения входного звена в заданном положении: Pдв=Fур•VA•cos(FурVA)=Mур•ω.