54) Режимы движения механизмов.
Полным временем движения механизма наз. промежуток времени от момента начала движения механизма до момента конца его движения. Так как закон движения всех звеньев механизма определяется законом движения начального звена, то полным временем движения механизма является также промежуток времени от момента начала движения начального звена до момента конца его движения.
Полное время движения механизма состоит из трех частей:
а) времени разбега;
б) времени установившегося движения;
в) времени выбега.
Время разбега характеризуется возрастанием скорости начального звена от нулевого значения до некоторого среднего значения, соответствующего нормальной рабочей скорости этого звена механизма. Установившимся движением механизма называется движение, при котором его кинетическая энергия является периодической функцией времени. Во время установившегося движения обычно скорость начального звена механизма колеблется около среднего значения, соответствующего нормальной рабочей скорости этого звена механизма. Промежуток времени, по истечении которого положение, скорость и ускорение начального звена механизма принимают первоначальные значения, является периодом изменения кинетической энергии механизма и называется циклом установившегося движения механизма.
Время выбега характеризуется убыванием скорости начального звена от среднего значения нормальной рабочей скорости механизма до нулевого ее значения.
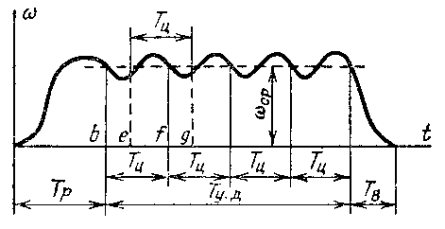
На рисунке показана так называемая тахограмма механизма— кривая w = w (t) зависимости угловой скорости w начального звена от времени t. Полное время Т движения механизма состоит из времени Тр разбега, времени Ту.д установившегося движения и времени Тв выбега. Рисунке показывает, что в течение времени установившегося движения кривая скорости w = w (t)обычно имеет некоторые периодические колебания около среднего значения wср, соответствующего нормальной рабочей скорости начального звена.
На рисунке время установившегося движения имеет четыре цикла. Каждому циклу оответствует время Тц. Таким образом, общее время Т равно
T=T p+T у.д + Tв а время Т у.д равноТу.д=kT
где к — число циклов.
Периодическим движением механизма называется такое движение, при котором в течение некоторого промежутка времени механизм обладает постоянными циклами движения, причем в течение каждого цикла движение происходит по одному и тому же закону.
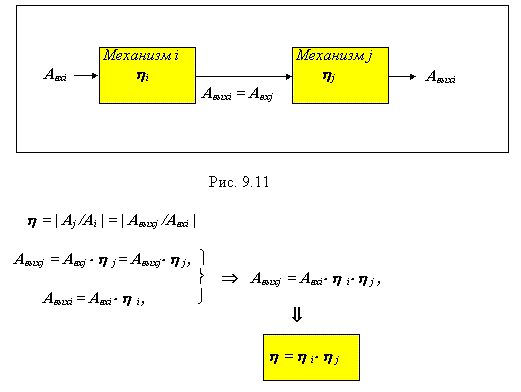
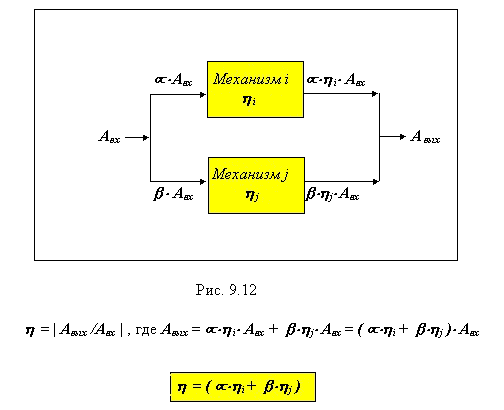
55) Определение кпд машин при последовательном, параллельном и смешанном соединении механизмов.
при последовательном соединении (рис. 9.11) весь поток механической энергии проходит последовательно через каждый из механизмов
при параллельном соединении механизмов i и j (рис. 9.12) поток механической энергии делится на две части: часть проходящую через механизм i обозначим , а часть проходящую через механизм j , причем + = 1.