

11. Представление геометрических моделей. Полигональные сетки и способы …
Наиболее распространённые представления графических объектов:
1. Пространственное подразбиение.
Если в трёхмерном пространстве есть тело, то это пространство можно разбить на кубики (воксели). Для каждого кубика b(i, j, k) можно указать, пересекается ли он с телом, то есть лежит ли он внутри, на границе – 1 или вне тела – 0. В некоторых случаях удобно применять некоторые промежуточные значения, задавая тем самым плотность в данной точке пространства.
Характеристики воксельного представления:
• Только приближение реального объекта. Поверхности, не параллельные осям координат, представляются приблизительно. Качество приближения зависит от относительного размера вокселей.
• Требует больших размеров памяти для хранения, и эти требования резко возрастают при увеличении разрешения (растет как куб от разрешения).
• С таким представлением хорошо работают в основном пространственные алгоритмы, такие как вычисление объема объекта, нахождение центра масс и т.д.
• Можно проводить набор операций: пересечение, объединение, вычитание.
2. Граничное (поверхностное). Тела задаются ограниченными фрагментами поверхностей.
3. Конструктивное.
При конструктивном представлении вводятся примитивы тел. Конструируя эти объекты и применяя теоретико-множественные операции, можно получить более сложное тело.
Под операциями понимаются булевы операции над примитивами, а так же геометрические преобразования, такие как передвижение, поворот, изменение размеров.
Полигональная сетка представляет собой совокупность ребер, вершин и многоугольников.
Виды представлений полигональных сеток:
1. Явное представление – многоугольник задается последовательностью вершин {x1,y1,z1},{x2,y2,z2},…,{xn,yn,zn}
2. Список вершин – перечисление всех вершин, встречающихся в многоугольниках: {x1,y1,z1},…,{xn,yn,zn}. При представлении многоугольника указываем лишь индексы вершин.
3. Определение многоугольника списком ребер. В такой модели грань представляется набором ребер и вершины грани определяются через ребра.
4. Крылатое представление: структура основывается на списке ребер, и для каждого ребра возникают две соседние грани. Каждое ребро ссылается на соседние грани, на ближайшие соседние ребра и опирается на две вершины. В результате ссылки для каждого ребра образуют кольцевые списки.
Полигон удобно представлять в виде списка (кольца) вершин, хранящегося в кольцевом списке с двойными связями. Необходимы функции для добавления, удаления, редактирования, поиска вершин.
Часто применяются следующие способы представления полигонов:
указатель на список вершин;
количество вершин;
указатель на текущую вершину;
функции для работы с вершинами;
функция расщепления полигона (деление полигона на два меньших по некоторой хорде);
проверка принадлежности точки полигону;
поиск наименьшей вершины (если определена некоторая функция упорядочивания).
12. Аффинные преобразования, их свойства, однородные координаты.
Для решения таких задач, как движение объектов и их частей, управления камерой применяются аффинные преобразования (АП), рассмотрим их основные свойства:
1) точки, лежащие на одной прямой, после преобразования лежат на одной прямой;
2) пересекающиеся прямые остаются пересекающимися, а параллельные – параллельными;
3) при АП пространства пересекающиеся плоскости остаются пересекающимися, параллельные – параллельными, а скрещивающиеся – скрещивающимися;
4) при АП сохраняются отношения площадей двух квадратов на плоскости и отношение объемов двух кубов в пространстве.
Пусть М - произвольная точка плоскости с координатами х и у, вычисленными относительно заданной прямолинейной координатной системы. Однородными координатами этой точки называется любая тройка одновременно неравных нулю чисел x1, x2, x3, связанных с заданными числами x и y следующими соотношениями:
x
Однородные
координаты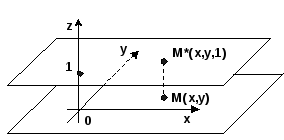
При решении задач компьютерной графики однородные координаты обычно вводятся так: произвольной точке М(х, у) плоскости ставится в соответствие точка М*(х,у,1) в пространстве. Произвольная точка на прямой, соединяющей начало координат, точку 0(0, 0, 0) с точкой М*(х, у, 1), может быть задана тройкой чисел вида (hx, hy, h).
Будем считать, что h0. Вектор с координатами hx, hy, h является направляющим вектором прямой, соединяющей точки 0(0, 0, 0) и М*(х, у, 1). Эта прямая пересекает плоскость z = 1 в точке (х, у, 1), которая однозначно определяет точку (х, у) координатной плоскости ху.
При помощи троек однородных координат и матриц третьего порядка можно описать любое аффинное преобразование плоскости. В самом деле, считая h = 1, сравним две записи: помеченную символом * и матричную:

Нетрудно заметить, что после перемножения выражений, стоящих в правой части последнего соотношения, мы получим обе формулы (*) и верное числовое равенство 1 == 1. Тем самым сравниваемые записи можно считать равносильными.
Выпишем соответствующие матрицы третьего порядка для базовых аффинных преобразований:
|
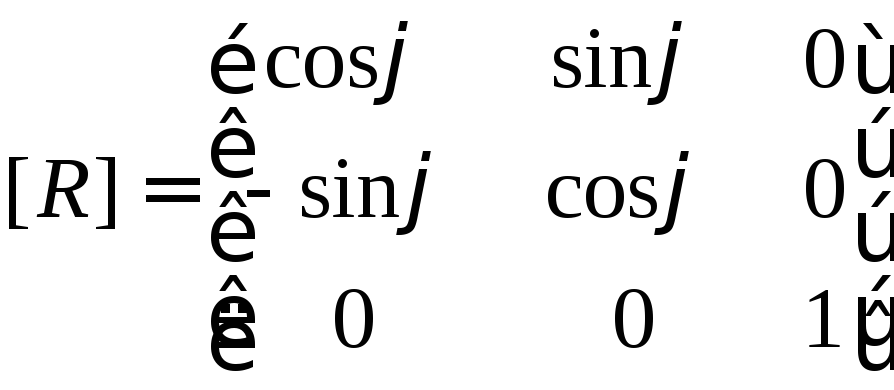
1. Матрица вращения (rotation)
|
2. Матрица растяжения (сжатия) (dilatation)
|
|
3. Матрица переноса (translation)
|
4. Матрица отражения (reflection)
|
 ;
; ;
; ;
;