

16. Этапы создания графического объекта. Преобразование положения объекта. Понятие камеры. Особенности матричных преобразований.
Задание 3D объекта и его создание разбивается на несколько этапов, в процессе которых последовательно преобразуется система координат. Изначально объект задается в некоторой своей локальной системе координат, которая затем размещается в мировой системе координат. Далее определяем видовую систему координат, задавая картинную плоскость, положение глаза (камеры) и систему координат камеры.
Основной задачей проектирования является перевод 3-х мерного объекта, заданного в видовой системе координат, в 2-х мерный объект нормализованной системы координат устройства.
При
проектировании отсекаются объекты,
которые не попадают в область видимости,
а также определяется множество значений
z
(zÎ[near;
-far]),
для которого точки, имеющие значения
координаты z,
принадлежащие этому множеству, являются
видимыми, а точки, находящиеся слишком
близко (![]() )
или слишком далеко (
)
или слишком далеко (![]() )
– невидимыми.
)
– невидимыми.
Преобразования над объектами по функциональному признаку можно разделить на следующие группы:
- моделирующие преобразования (аффинные преобразования);
- видовые преобразования (положение, направление камеры и т.д.);
- задание проекции;
- задание области видимости.
Моделирующие преобразования определяют положение объекта в мировом пространстве. Изначально матрица видового преобразования строится на основе информации о параметрах камеры (положении направлении камеры, положительного направления) и положении мира относительно камеры.
Наиболее частым способом определения параметров камеры является определение следующих ее свойств:
- координаты камеры;
- направление обзора;
- координаты вектора;
- определяющего вертикальное направление.
Серия преобразований может быть свернута в одну матрицу преобразований:
композиция преобразований не является коммутативной;
матрицы преобразований могут быть перемножены между собой в одну;
размещение трансформации описывает координатную систему, в которой преобразование имело место.
преобразования обратимы, (для переноса на вектор (a,b,c) – это перенос (-a,-b,-c));
преобразования могут восприниматься как изменения в системе координат;
преобразования, необходимые для перевода точки из КС2 в КС1, можно получить как обратную последовательность кадров, переводящих КС1 в КС2.
17. Понятие растрового алгоритма. Понятие связности. Основные требования предъявляемые к растровым алгоритмам.
Так как в подавляющем большинстве графические устройства являются растровыми, то есть представляют изображение в виде прямоугольной матрицы пикселов (растра), то, возникает необходимость в растровых алгоритмах.
Хотя большинство графических библиотек содержат внутри себя достаточное количество простейших растровых алгоритмов, таких, как:
• переведение идеального объекта (отрезка, окружности и др.) в их растровые образы;
• обработка растровых
изображений.
обработка растровых
изображений.
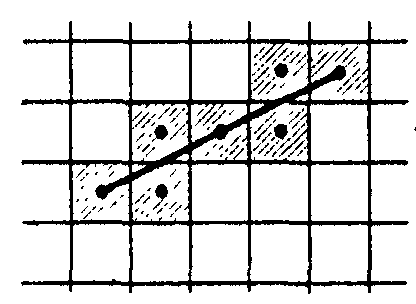
Достаточно важным понятием для растровой сетки является связность - возможность соединения двух пикселов растровой линией, то есть последовательным набором пикселей. При этом возникает вопрос, когда пикселы (х1,у1)и (х2,y2) можно считать соседними.
Вводится два понятия связности:
4-связность, когда пикселы считаются соседними, если либо их х-координаты, либо у-координаты отличаются на единицу, то есть
x1-x2+ y1-y21,
8-связность, когда пикселы считаются соседними, если их х- и у-координаты отличаются не более чем на единицу, то есть
x1-x21, y1-y21,
Понятие 4-связности является более сильным, чем 8-связность: любые два 4-связных пиксела являются и 8-связными, но не наоборот.
т.к. понятие линии базируется на понятии связанности, то естественным образом возникает понятие 4- и 8-связных линий. Поэтому когда идет речь о растровом представлении, например, отрезка, то следует ясно понимать, о каком именно представлении идет речь. При этом нужно иметь в виду, что растровое представление объекта не является единственным и возможны различные способы построения.