

2.1. Представление сигналов и помех
ОСНОВНЫЕ СООТНОШЕНИЯ
Приведем основные аналитические соотношения, которые будем использовать в дальнейшем. При рассмотрении этих соотношений будем осуществлять временное и частотное представление функций времени (сигналов).
Для прямого преобразования Фурье (спектральной функции) сигнала s(t)
![]() (2.1)
(2.1)
Для обратного преобразования Фурье –
![]() . (2.2)
. (2.2)
В ряде случаев для сокращения выкладок используется комплексное представление действительного сигнала s(t)
![]() , (2.3)
, (2.3)
где
![]() – сопряженный с s(t)
сигнал, определяемый на основе
преобразования Гильберта,
– сопряженный с s(t)
сигнал, определяемый на основе
преобразования Гильберта,
 . (2.4)
. (2.4)
Представление s(t) в комплексной форме (2.3) называют представлением в аналитической форме или аналитическим сигналом.
Легко
проверить, что
![]() ,
,
![]() .
Следовательно, если имеется сигнал
сложной формы
.
Следовательно, если имеется сигнал
сложной формы
![]() (2.5)
(2.5)
то сопряженный ему сигнал
![]() .
.
Таким образом, каждая гармоническая составляющая сопряженного сигнала повернута на угол /2 относительно соответствующей составляющей исходного сигнала s(t).
Применив (2.2) к , получим преобразование Фурье сопряженного сигнала
![]() (2.6)
(2.6)
Спектральная
функция комплексного сигнала
![]()
![]() (2.7)
(2.7)
Следовательно, для получения спектральной функции комплексного сигнала необходимо удвоить спектральную функцию исходного сигнала s(t) при > 0 и приравнять ее нулю при < 0. Сигнал s(t), спектральная функция которого равна нулю за пределами некоторой полосы частот, так что
![]() (2.8)
(2.8)
называется полосовым.
Для полосовых сигналов используется представление
![]() (2.9)
(2.9)
где
![]() – огибающая полосового сигнала s(t);
– огибающая полосового сигнала s(t);
![]() – полная фаза. (2.10)
– полная фаза. (2.10)
Если
![]() ,
то сигнал (2.10) называют узкополосным в
спектральном смысле. Его можно представить
в комплексной форме (2.3) как
,
то сигнал (2.10) называют узкополосным в
спектральном смысле. Его можно представить
в комплексной форме (2.3) как
![]() , (2.11)
, (2.11)
где
![]() (2.12)
(2.12)
– комплексная огибающая (комплексная амплитуда) сигнала.
Узкополосный сигнал можно рассматривать в виде суммы двух квадратурных составляющих:
![]() (2.13)
(2.13)
где
![]() ,
,
![]() , (2.14)
, (2.14)
с помощью которых определяется мгновенная частота
![]() . (2.15)
. (2.15)
Между
преобразованиями сигналов
![]() и
и
![]() имеет место соотношение
имеет место соотношение
![]() (2.16)
(2.16)
Представление узкополосных сигналов через комплексную огибающую можно распространить и на так называемые узкополосные системы. Узкополосными системами называются такие системы, отклик которых на произвольный входной сигнал s(t) является узкополосным сигналом.
Пусть
линейная узкополосная система с
постоянными параметрами имеет импульсную
характеристику h(t)
и частотную передаточную функцию
![]() .
Импульсную характеристику h(t)
можно также представить в комплексной
форме:
.
Импульсную характеристику h(t)
можно также представить в комплексной
форме:
![]() .
Ей соответствует частотная передаточная
функция
.
Ей соответствует частотная передаточная
функция
![]() ,
где
,
где
![]() согласно (2.7) есть частотная передаточная
функция идеального фильтра верхних
частот, пропускающего все «положительные»
частоты.
согласно (2.7) есть частотная передаточная
функция идеального фильтра верхних
частот, пропускающего все «положительные»
частоты.
Таким
образом, отклик узкополосной системы
в комплексной форме
![]() на входной сигнал s(t)
может быть получен как выходной сигнал
последовательно включенных рассматриваемой
узкополосной системы и фильтра верхних
частот с частотной передаточной функцией
на входной сигнал s(t)
может быть получен как выходной сигнал
последовательно включенных рассматриваемой
узкополосной системы и фильтра верхних
частот с частотной передаточной функцией
![]() .
Поскольку все операции являются
линейными, то порядок их выполнения
может быть произвольным, как показано
на рис.2.1.
.
Поскольку все операции являются
линейными, то порядок их выполнения
может быть произвольным, как показано
на рис.2.1.
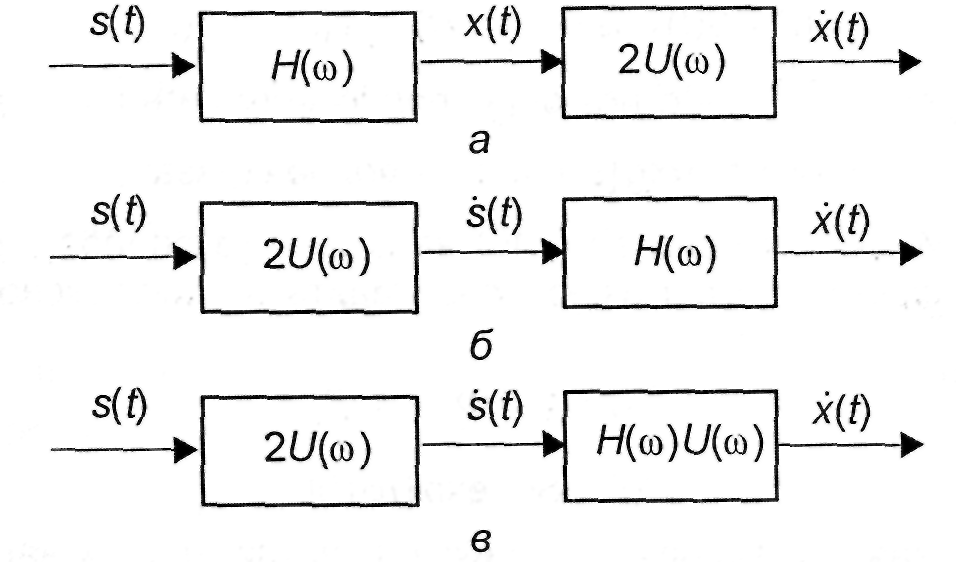
Рис. 2.1. Три эквивалентные схемы представления аналитического сигнала, соответствующего отклику линейной системы с постоянными параметрами
В
варианте (рис.2.1, в) линейная
система имеет комплексную импульсную
характеристику
![]() ,
поэтому ее отклик на комплексный сигнал
определяется выражением
,
поэтому ее отклик на комплексный сигнал
определяется выражением
![]() . (2.17)
. (2.17)
Если
![]() и
выразить через комплексные огибающие
(2.12), то
и
выразить через комплексные огибающие
(2.12), то
![]() , (2.18)
, (2.18)
![]() – комплексная
огибающая импульсной характеристики.
– комплексная
огибающая импульсной характеристики.
Из (2.18) следует, что отклик узкополосной линейной системы с постоянными параметрами представляет собой узкополосный сигнал с комплексной огибающей
![]() . (2.19)
. (2.19)
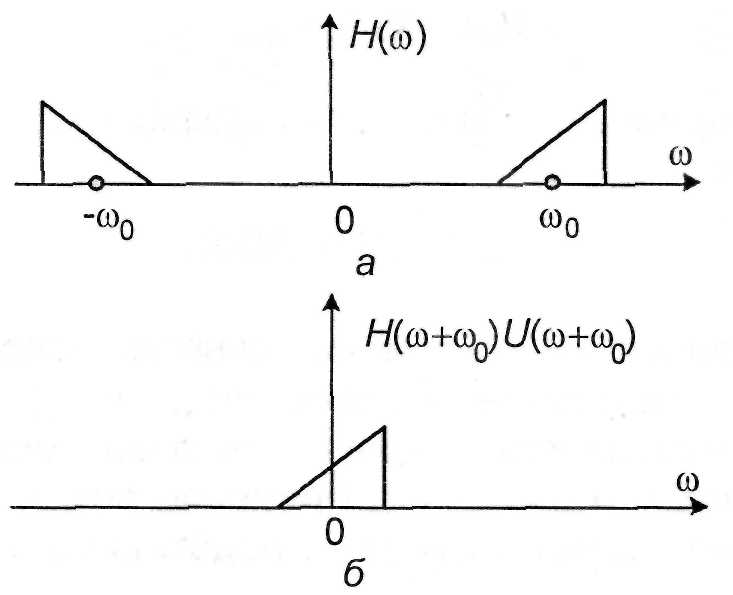
Рис. 2.2. Частотная передаточная функция узкополосной линейной системы (а) и ее низкочастотного эквивалента (б)
Таким
образом, комплексная огибающая отклика
узкополосной системы может быть найдена
как результат обработки комплексной
огибающей входного сигнала эквивалентной
низкочастотной линейной системой с
комплексной импульсной характеристикой
![]() и частотной передаточной функцией
и частотной передаточной функцией
![]() ,
как показано на рис.2.2.
,
как показано на рис.2.2.
Заметим,
что если
![]() симметрична относительно частоты
симметрична относительно частоты
![]() ,
то низкочастотный эквивалент
узкополосной линейной системы имеет
действительную импульсную характеристику.
,
то низкочастотный эквивалент
узкополосной линейной системы имеет
действительную импульсную характеристику.
ДИСКРЕТНОЕ ПРЕДСТАВЛЕНИЕ НЕПРЕРЫВНЫХ СИГНАЛОВ
Реальные сигналы, присутствующие в устройствах и системах связи, являются на определенных интервалах непрерывными функциями времени. Однако при анализе часто удобно использовать их представление в виде выборочных мгновенных значений, т.е. в виде рядов по системам ортонормальных функций, коэффициентами при которых являются выборочные значения.
Пусть
имеется n независимых
сигналов
![]() .
Независимость сигналов означает, что
ни один из этих сигналов не может быть
представлен в виде линейной комбинации
остальных (n – 1)
сигналов, т.е. не существует постоянных
a1,
a2,
…, an
(не равных нулю), таких, что
.
Независимость сигналов означает, что
ни один из этих сигналов не может быть
представлен в виде линейной комбинации
остальных (n – 1)
сигналов, т.е. не существует постоянных
a1,
a2,
…, an
(не равных нулю), таких, что
![]() . (2.20)
. (2.20)
Эти сигналы образуют базис.
Предположим,
что сигнал s(t) может быть представлен
в виде линейной комбинации n
независимых сигналов
![]() :
:
![]() . (2.21)
. (2.21)
Если
каждый сигнал может быть представлен
в виде (2.21), то мы имеем n-мерное
пространство сигналов. Множество
сигналов
![]() называется ортонормальным, если
выполняется условие
называется ортонормальным, если
выполняется условие
![]() (2.22)
(2.22)
Для ортонормального множества коэффициенты sk в (2.21) определяются как
![]() . (2.23)
. (2.23)
При выбранном множестве базисных сигналов сигнал s(t) может быть представлен набором чисел (s1, s2, …, sn) или точкой в n-мерном пространстве. Теперь сигнал s(t) может рассматриваться как вектор s = (s1, s2, …, sn). Примером дискретного представления сигналов может служить представление в виде ряда В.А. Котельникова
![]() (2.24)
(2.24)
где sinc(x) = sin(x)/x, В – верхняя частота спектра сигнала s(t).
Здесь в качестве ортонормальных функций выбраны функции
![]() .
.
Легко проверить, что
![]() (2.25)
(2.25)
При этом
![]() (2.26)
(2.26)
![]() (2.27)
(2.27)
Таким
образом, любой сигнал s(t)
с ограниченным спектром может быть
представлен точкой в пространстве
сигналов с координатами (…, sk‑1,
…, s‑2,
s‑1,
s0,
s1,
s2,
…, sk,
…), sk
– значение k-го отсчета,
деленное на
![]() .
.
Рассмотрим теперь четыре сигнала:
![]() .
.
Если
в качестве ортонормальных функций
выбрать функции
![]() ,
,
![]() ,
то эти сигналы могут быть представлены
в виде векторов
,
то эти сигналы могут быть представлены
в виде векторов
![]() ,
,
![]() ,
,
![]() ,
,
![]() и размерность пространства сигналов
равна двум.
и размерность пространства сигналов
равна двум.
Если
в пространстве сигналов сигналы s1(t)
и s2(t)
представлены векторами s1 = (s11, s12, …, s1n)
и s1 = (s21, s22, …, s2n),
причем
![]() ,
,
![]() ,
то
,
то
![]() . (2.28)
. (2.28)
Таким образом, интеграл от произведения двух сигналов есть скалярное произведение векторов в пространстве сигналов, и взаимной ортогональности двух функций времени соответствует ортогональность векторов при их дискретном представлении.
Для сигнала s(t) энергия Es определяется выражением
![]() . (2.29)
. (2.29)
Из соотношения (2.28) следует, что
![]() . (2.30)
. (2.30)
где |s|2 – квадрат длины вектора s.
Следовательно, энергия сигнала равна квадрату длины соответствующего вектора в пространстве сигналов.
Итак, размерность пространства сигналов равна максимальному количеству независимых векторов в этом пространстве. В n-мерном пространстве может быть не более, чем n независимых векторов. Если найдено множество из n независимых ректоров, то можно с помощью процедуры Грама-Шмидта построить другое множество из n независимых векторов, которые являются взаимно ортогональными и образуют координатную систему.
ГАУССОВСКИИ СЛУЧАЙНЫЙ ПРОЦЕСС
Случайный процесс (t) называется гауссовским, если совокупность случайных величин (t1), (t2), … (tn), определенных для моментов времени t1, t2, … tn, является совместно гауссовской, т.е. имеем совместную функцию плотности распределения вероятности (ФПРВ), определяемую выражением
![]() , (2.31)
, (2.31)
где K – ковариационная матрица,
 , (2.32)
, (2.32)
![]() – ковариация
случайных величин i
и j,
– ковариация
случайных величин i
и j,
![]() – математическое ожидание случайной
величины i
|K| – определитель
матрицы K, Kij
алгебраическое дополнение элемента
– математическое ожидание случайной
величины i
|K| – определитель
матрицы K, Kij
алгебраическое дополнение элемента
![]() в матрице K. Заметим,
что
в матрице K. Заметим,
что
![]() – дисперсия случайной величины i
.
– дисперсия случайной величины i
.
Гауссовский случайный процесс не только представляет весьма удобную модель случайных процессов, которые встречаются в реальных ситуациях, но и обладает рядом свойств, позволяющих упростить получение некоторых математических, важных с практической точки зрения, результатов.
Из (2.31) следует, что гауссовский случайный процесс полностью определяется корреляционной функцией
![]() , (2.33)
, (2.33)
и
математическим ожиданием
![]() ,
так как
,
так как
![]() .
.
Гауссовский случайный процесс называется стационарным, если выполняются условия
![]() для всех t. (2.34)
для всех t. (2.34)
Условия (2.34) являются условиями стационарности в широком смысле, поэтому для гауссовского случайного процесса они являются условиями строгой стационарности.
Для
стационарного гауссовского случайного
процесса ковариация
![]() определяется следующим выражением:
определяется следующим выражением:
![]() . (2.35)
. (2.35)
Другим важным свойством гауссовского случайного процесса является то, что отклик линейной системы на воздействие в виде гауссовского случайного процесса также гауссовский случайный процесс.
Пусть на входе линейной системы с импульсной характеристикой h(t) имеется гауссовский случайный процесс (t). Тогда случайный процесс на выходе системы
![]() . (2.36)
. (2.36)
Поскольку (t) – гауссовский процесс, то все случайные величины (t-k) являются совместно гауссовскими (по определению). Следовательно, случайные величины (t1), (t2), … (tn), определенные для моментов времени t1, t2, … tn, есть линейные комбинации совместно гауссовских случайных величин и также являются совместно гауссовскими. Таким образом, случайный процесс (t) является гауссовским.
Если имеется полное множество ортонормальных базисных функций {k(t)}, то в пространстве сигналов реализация х(t) гауссовского случайного процесса может быть представлен в виде ряда
![]() , (2.37)
, (2.37)
где
![]() .
.
Заметим,
что случайный процесс (t)
состоит из множества реализаций x(t).
Поэтому для каждой реализации имеется
собственный коэффициент. Отсюда следует,
что значения коэффициентов (x1,
x2, …
xn)
– это значения случайных величин (1,
2,
… n),
полученные для определенной реализации
с функцией плотности распределения
вероятности
![]() .
.
Рассмотрим
в качестве примера гауссовский случайный
процесс h(t)
в виде белого шума со спектральной
плотностью N0/2
и корреляционной функцией
![]() ,
,
![]() – дельта-функция. Представим n(t)
в виде ряда
– дельта-функция. Представим n(t)
в виде ряда
![]()
Так как белый шум имеет неограниченную полосу, то размерность пространства сигналов также неограниченна.
Покажем, что n1, n2, … – независимые случайные величины с дисперсией N0/2. Действительно,
![]() ,
,

Так как
![]() ,
,
то, используя правило интегрирования с -функцией, получаем
 (2.38)
(2.38)
Следовательно случайные величины ni и nj некоррелированны, а поскольку они являются гауссовскими, то и независимы.
Если ограничиться представлением белого шума в виде конечного ряда, т.е. ограничить размерность пространства сигналов, то функция плотности распределения вероятности совокупности случайных величин n1, n2, … nN будет определяться следующим выражением:
 (2.39)
(2.39)
Из (2.39) следует, что ФПРВ белого гауссовского шума зависит только от длины шумового вектора х в пространстве сигналов и поэтому обладает свойством сферической симметрии.
УЗКОПОЛОСНЫЙ СЛУЧАЙНЫЙ ПРОЦЕСС
Рассмотрим
теперь действительный, стационарный в
широком смысле случайный процесс n(t)
и комплексный процесс
![]() .
Существуют следующие формы представления
этих процессов:
.
Существуют следующие формы представления
этих процессов:
![]() , (2.40)
, (2.40)
![]() , (2.41)
, (2.41)
![]() , (2.42)
, (2.42)
![]() , (2.43)
, (2.43)
где
![]() –
комплексная огибающая случайного
процесса n(t).
–
комплексная огибающая случайного
процесса n(t).
Спектральная
плотность процесса
![]() может быть легко определена, если учесть,
что он формируется на выходе линейной
системы с постоянными параметрами и
частотной передаточной функцией 2U(f).
Поэтому получаем
может быть легко определена, если учесть,
что он формируется на выходе линейной
системы с постоянными параметрами и
частотной передаточной функцией 2U(f).
Поэтому получаем
![]() , (2.44)
, (2.44)
Из выражения (2.44) следует, что спектральная плотность комплексного процесса равна учетверенной односторонней спектральной плотности действительного процесса n(t).
Корреляционная функция комплексной огибающей равна
![]() , (2.45)
, (2.45)
где (..) – символ комплексного сопряжения. Следовательно, спектральная плотность
![]() , (2.46)
, (2.46)
и совпадает со спектральной плотностью комплексного процесса, перенесенной в начало координат. Это отражено на рис.2.3.
Можно показать, что авто- и взаимно-корреляционные функции квадратурных составляющих nI(t) и nQ(t) удовлетворяют следующим соотношениям:
![]() , (2.47)
, (2.47)
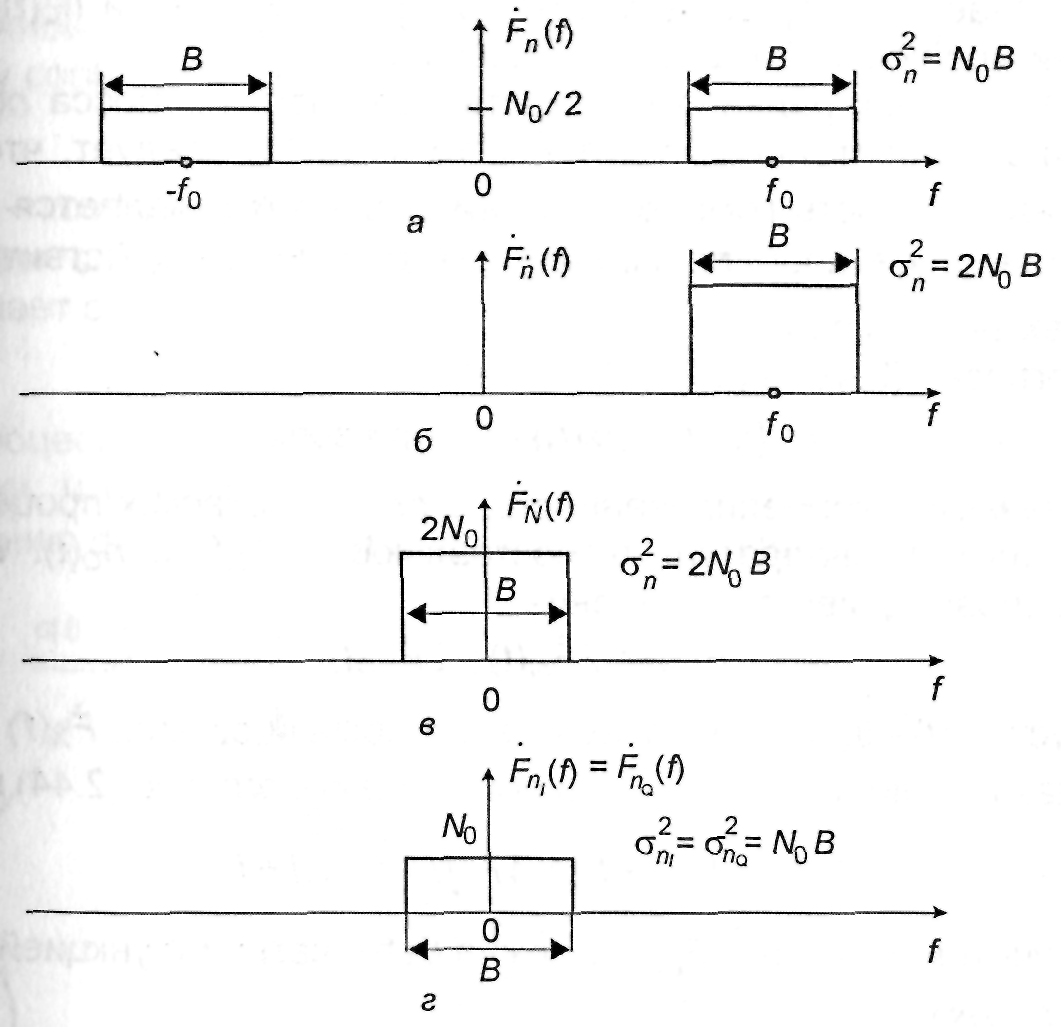
Рис. 2.3. Представление спектральных плотностей узкополосного процесса типа белого шума n(t): a – спектральная плотность исходного процесса n(t); б – спектральная плотность комплексного процесса ; в – спектральная плотность комплексной огибающей ; г – спектральная плотность квадратурных составляющих nI(t) и nQ(t)
![]() , (2.48)
, (2.48)
Таким образом,
![]() , (2.49)
, (2.49)
Из представленных результатов вытекают следующие выводы:
1.Так
как
![]() есть действительная величина, то из
(2.49) следует, что
есть действительная величина, то из
(2.49) следует, что
![]() , (2.50)
, (2.50)
Это означает, что для любого момента времени t процессы nI(t) и nQ(t) являются некоррелированными, а в случае гауссовского случайного процесса и статистически независимыми.
2. Из выражений (2.44), (2.45), (2.48), (2.49) следует, что
![]() , (2.51)
, (2.51)
![]() , (2.52)
, (2.52)
Это означает, что средние мощности процессов nI(t) и nQ(t) равны средней мощности исходного процесса n(t).
3.
Если спектральная плотность исходного
процесса n(t)
симметрична относительно частоты
f0, то из
(2.46) следует, что спектральная плотность
комплексной огибающей
является четной функцией, а ее
корреляционная функция
![]() действительной при всех значениях .
действительной при всех значениях .
Согласно (2.49) и (2.50)
![]() , (2.53)
, (2.53)
что означает некоррелированность, а для гауссовских процессов и независимость квадратурных составляющих nI(t) и nQ(t). В этом случае справедливо соотношение
![]() , (2.54)
, (2.54)
Пусть
х(t) – действительный
узкополосный сигнал,
![]() – спектральная плотность комплексной
огибающей. Согласно (2.44) и (2.46)
– спектральная плотность комплексной
огибающей. Согласно (2.44) и (2.46)
![]() ,
,
С учетом того, что должна быть четной функцией частоты, получаем
![]() , (2.55)
, (2.55)
Выражение (2.55) позволяет определить спектральную плотность действительного сигнала по известной спектральной плотности его комплексной огибающей.