

17. Характеристическое уравнение в математике
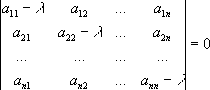
1) Х. у. матрицы — алгебраическое уравнение вида
 ;
;
определитель, стоящий в левой части Х. у., получается из определителя матрицы А = ||aik||n1 вычитанием величины l из диагональных элементов. Этот определитель представляет собой многочлен относительно Х — характеристический многочлен. В раскрытом виде Х. у. записывается так:
![]() ,
,
где S1 = a11 + a22 +... ann —
т. н. след матрицы, S2 — сумма всех главных
миноров 2-го порядка, т. е. миноров вида
![]() (i < k) и т.д., а Sn — определитель матрицы
А. Корни Х. у. l1, l2,..., ln называются
собственными значениями матрицы А. У
действительной симметричной матрицы,
а также у эрмитовой матрицы все lk
действительны, у действительной
кососимметричной матрицы все lk чисто
мнимые числа; в случае действительной
ортогональной матрицы, а также унитарной
матрицы все |lk| = 1.
(i < k) и т.д., а Sn — определитель матрицы
А. Корни Х. у. l1, l2,..., ln называются
собственными значениями матрицы А. У
действительной симметричной матрицы,
а также у эрмитовой матрицы все lk
действительны, у действительной
кососимметричной матрицы все lk чисто
мнимые числа; в случае действительной
ортогональной матрицы, а также унитарной
матрицы все |lk| = 1.
Х. у. встречаются в самых разнообразных областях математики, механики, физики, техники. В астрономии при определении вековых возмущений планет также приходят к Х. у.; отсюда и второе название для Х. у. — вековое уравнение.
2) Х. у. линейного дифференциального уравнения с постоянными коэффициентами
a0ly (n) + a1y (n-1) +... + an-1y' + any = 0— алгебраическое уравнение, которое получается из данного дифференциального уравнения после замены функции у и её производных соответствующими степенями величины l, т. е. уравнение
a0ln + a1ln-1 +... + an-1 y' + any = 0.
К этому уравнению приходят при отыскании частного решения вида у = сеlх для данного дифференциального уравнения. Для системы линейных дифференциальных уравнений
![]() ,
,
![]() ,
,
Х. у. записывается при помощи определителя

Х. у. матрицы A = , составленной из коэффициентов уравнений данной системы.
18. Нахождение собственного вектора и собственных значений линейного преобразования (статья не окончена)
Рассмотрим пример:
>> A = [9 22 -6; -1 -4 1; 8 16 -5]
A =
9 22 -6
-1 -4 1
8 16 -5
>> [V,D]=eig(A)
V =
0.7071 0.8944 -0.4082
0.0000 -0.4472 0.4082
0.7071 -0.0000 0.8165
D =
3.0000 0 0
0 -2.0000 0
0 0 -1.0000
где А - Матрица преобразования для которой ищутся векторы и значений;
V - матрица собственных векторов линейного преобразования (векторы представлены в столбцах матрицы);
D - матрица, на диагонали которой находятся собственные числа линейного преобразования.
Теперь рассмотрим процедуру нахождения подробней, насколько требуют этого в университетской программе.
>> syms X x
>> A = [9 22 -6; -1 -4 1; 8 16 -5]
A =
9 22 -6
-1 -4 1
8 16 -5
>> X = A-eye(3)*x
X =
[ 9 - x, 22, -6]
[ -1, - x - 4, 1]
[ 8, 16, - x - 5]
>> det(X)
ans =
7*x - x^3 + 6
>> D = diag(solve(det(X)))
D =
[ -2, 0, 0]
[ 0, -1, 0]
[ 0, 0, 3]
>> B = A - diag(D(1,1)*ones(1,3))
B =
[ 11, 22, -6]
[ -1, -2, 1]
[ 8, 16, -3]
>> C = rref(B)
C =
[ 1, 2, 0]
[ 0, 0, 1]
[ 0, 0, 0]
>> B = A - diag(D(2,2)*ones(1,3))
B =
[ 10, 22, -6]
[ -1, -3, 1]
[ 8, 16, -4]
>> C = rref(B)
C =
[ 1, 0, 1/2]
[ 0, 1, -1/2]
[ 0, 0, 0]
>> B = A - diag(D(3,3)*ones(1,3))
B =
[ 6, 22, -6]
[ -1, -7, 1]
[ 8, 16, -8]
>> C = rref(B)
C =
[ 1, 0, -1]
[ 0, 1, 0]
[ 0, 0, 0]