

40.Инварианты кривой второго порядка. Определение вида кривой с помощью инвариантов.
Вид кривой зависит от четырёх инвариантов:
*инварианты относительно поворота и сдвига системы координат:
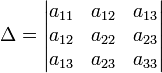
![]()
![]()
*инвариант относительно поворота системы координат (полуинвариант):
![]()
Согласно классификации кривых второго порядка:
I. Если I2 = 0, то данное уравнение (3.1) определяет кривую параболического типа:
I2 = 6 - 2a = 0, следовательно, при a = 3 уравнение определяет кривую параболического типа.
При a = 3 I3 = - a - 95 = -3 - 95 = 98 ¹ 0. Значит, при a = 3 уравнение (3.1) задаёт параболу.
II. Если I2 ¹ 0, то задаваемая кривая является центральной. Следовательно, при a ¹ 3 данное уравнение задаёт центральную кривую.
1.Если I2 > 0, то уравнение задаёт кривую эллиптического типа:
Значит, при a < 3 уравнение (3.1) задаёт кривую эллиптического типа.
a. Если I1 I3 < 0, то уравнение определяет эллипс:
I1 I3 = - (7 - a)(a+95) = a2+88a-665 < 0, при решении получаем a Î (-95 , 7). Следовательно, при a Î (-95 , 3) уравнение (3.1) задаёт эллипс.
b. Если I1 I3 > 0, то уравнение определяет эллипс:
I1 I3 = a2+88a-665 > 0, при решении получаем a Î (-¥, -95). Следовательно, при a Î (-¥ , -95) уравнение (3.1) задаёт мнимый эллипс.
c.Если I3 = 0, то уравнение определяет две мнимые пересекающиеся прямые:
I3 = -a - 95 = 0, при решении получаем a - 95. Следовательно, при a = - 95 уравнение (3.1) задаёт две мнимые пересекающиеся прямые.
2. Если I2 < 0, то уравнение задаёт кривую гиперболического типа:
Значит, при a > 3 уравнение (3.1) задаёт кривую гиперболического типа.
a.Если I3 ¹ 0, то уравнение определяет гиперболу:
I3 = -a - 95 ¹ 0, получаем a ¹ -95. Следовательно, при a Î (3 , +¥) уравнение (3.1) задаёт гиперболу.
41.Полярная система координат. Связь с прямоугольной системой координат. Построение кривой в полярной системе координат.
Полярная система координат — двумерная система координат, в которой каждая точка на плоскости определяется двумя числами — полярным углом и полярным радиусом. Полярная система координат особенно полезна в случаях, когда отношения между точками проще изобразить в виде радиусов и углов; в более распространённой, декартовой или прямоугольной системе координат, такие отношения можно установить только путём применения тригонометрических уравнений.
Полярная система координат задаётся лучом, который называют нулевым или полярной осью. Точка, из которой выходит этот луч, называется началом координат или полюсом. Любая точка на плоскости определяется двумя полярными координатами: радиальной и угловой. Радиальная координата (обычно обозначается ) соответствует расстоянию от точки до начала координат. Угловая координата, также называется полярным углом или азимутом и обозначается , равна углу, на который нужно повернуть против часовой стрелки полярную ось для того, чтобы попасть в эту точку.[1]
Определённая таким образом радиальная координата может принимать значения от нуля до бесконечности, а угловая координата изменяется в пределах от 0° до 360°. Однако, для удобства область значений полярной координаты можно расширить за пределы полного угла, а также разрешить ей принимать отрицательные значения, что отвечает повороту полярной оси по часовой стрелке.

Построить кривую в полярной системе координат