Тема 3. Методы моделирования процесса ионной имплантации.
Системы координат при моделировании ионной имплантации.
Чтобы правильно ориентироваться при описании процесса ионной имплантации, необходимо учитывать наличие трех систем координат и уметь связывать эти системы координат между собой.
Первая система координат – это система, привязанная к реальной установке ионной имплантации. В этой системе координат ионный пучок всегда направлен вдоль оси –Z.
Вторая система координат – это система, привязанная к подложке. В этой системе всегда ось X направлена вдоль базового среза пластины, ось Z – перпендикулярно поверхности подложки. Ось Y образует с заданными осями X и Z правую тройку (рисунок 3.1).
Третья система координат – это система, построенная непосредственно для проведения вычислений и моделирования либо двумерного сечения в двумерных задачах, либо трехмерного кристалла в трехмерных задачах.
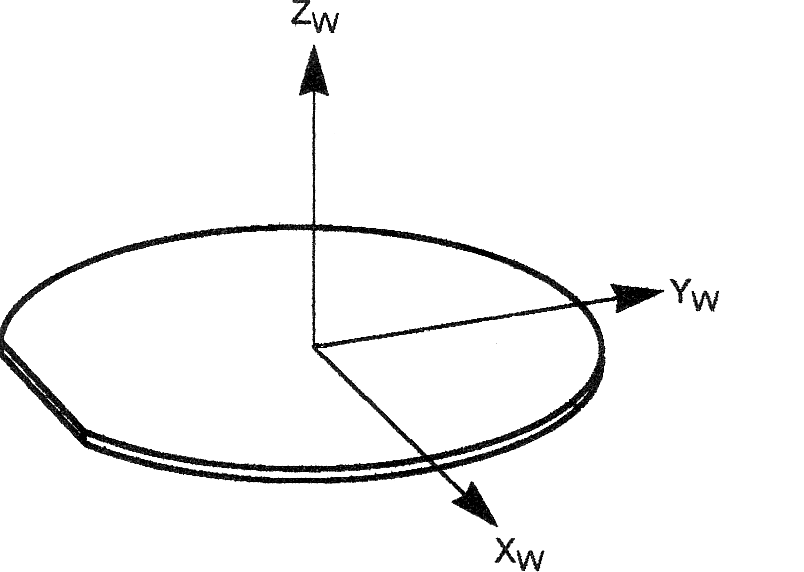
Рисунок 3.1 Система координат подложки
Положение пластины в установке ионной имплантации и связь первой и второй координатных систем определяется параметрами Tilt и Rotation. На рисунке 3.2, а показано положение пластины, при котором системы координат имплантера и подложки совмещены, т.е. Tilt = 0 и Rotation = 0.
В задачах двумерного моделирования при построении двумерного сечения третья система координат определяется через положение секущей в системе координат подложки. Положение секущей задается координатами начала (x0, y0) и конца (x1, y1) вектора секущей на поверхности подложки в операторе Cutline (x0, y0, x1, y1). На рисунке 3.2,а показано положение секущей, описываемой координатами Cutline (0, 0, 1, 0). На рисунке 3.2, б приведено соответствующее данному положению секущей двумерное сечение и система координат для его моделирования в программе Dios.
|
|
а) |
б) |
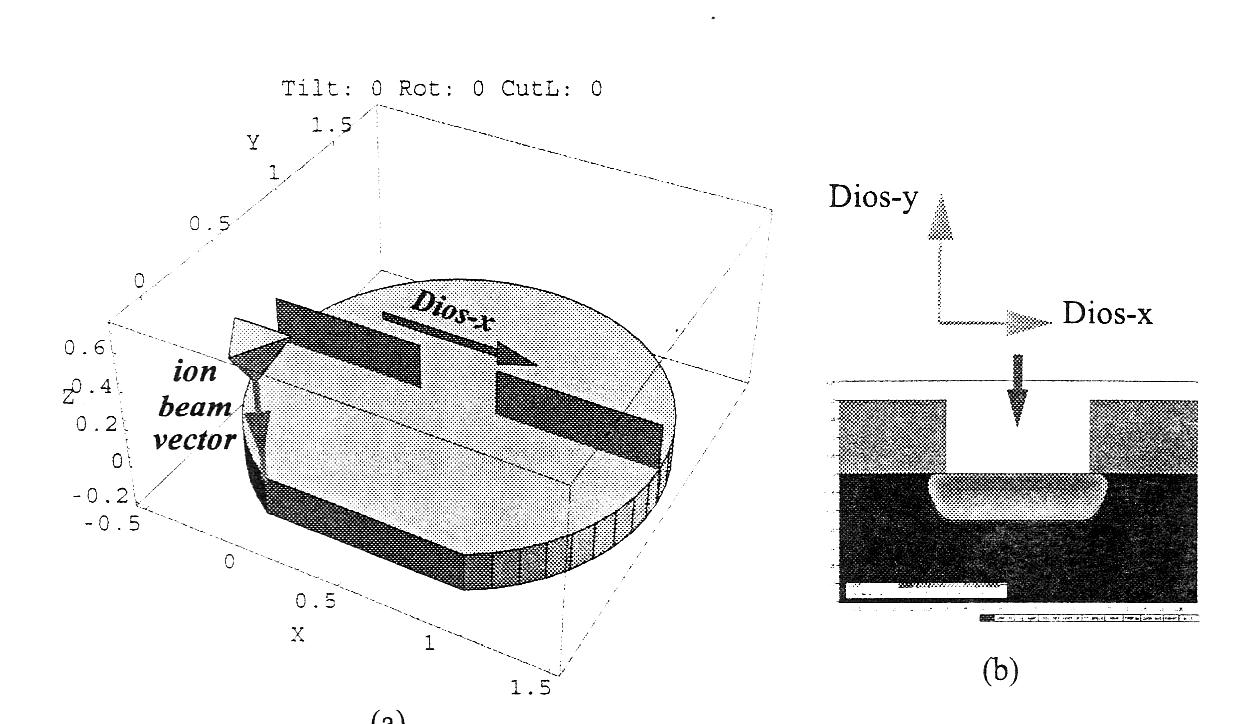
Рисунок 3.2 Системы координат, связанные параметрами Tilt=0, Rotation=0 и Cutline (0, 0, 1, 0): а – положение подложки, б – двумерное сечение.
В положении пластины, показанном на рисунке 3.2, а, направления всех координатных осей для имплантера и подложки совпадают. Положение подложки в имплантере может быть наклонным, что описывается как вращение вокруг направления базового среза и задается углом Tilt, и повернутым, что описывается, как вращение вокруг оси Z подложки и задается углом Rotation. Стандартное положение подложки, или положение по умолчанию, задаваемое углами Tilt=7º, Rotation= - 90º, показано на рисунке 3.3, а. В этом случае двумерное сечение для стандартного положения секущей Cutline (0, 0, 1, 0), приведенное на рисунке 3.2, б, уже не будет строго симметричным из-за имеющегося наклона ионного пучка.
Фактически углы Tilt и Rotation задают направление оси Z имплантера в системе координат подложки, как это показано на рисунке 3.4.
|
|
а) |
б) |
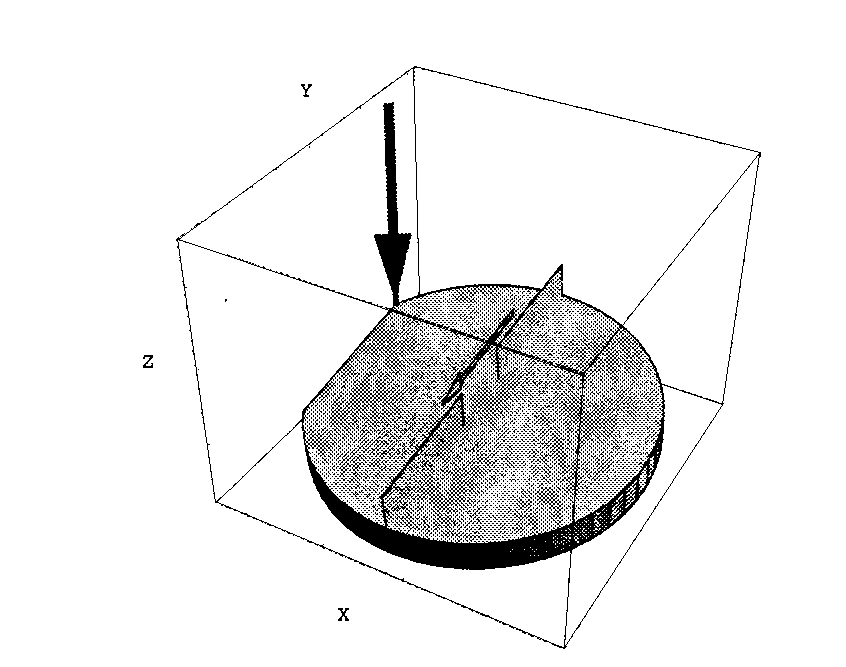

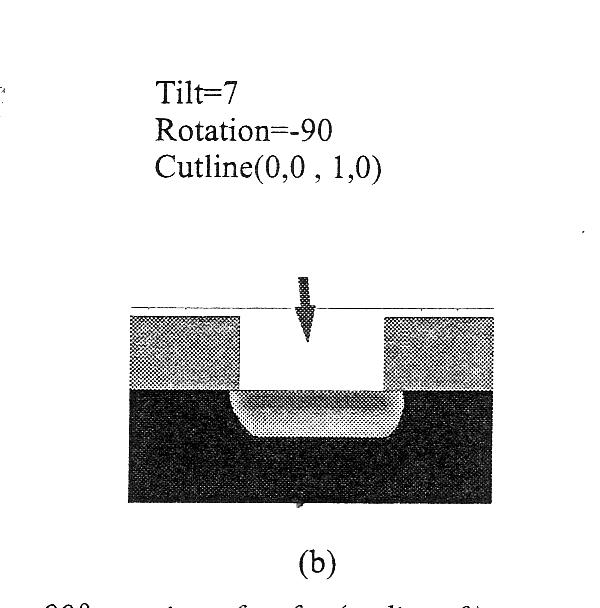
Рисунок 3.3 Системы координат, связанные параметрами Tilt=7º, Rotation= -90º и Cutline (0, 0, 1, 0): а – положение подложки, б – двумерное сечение.
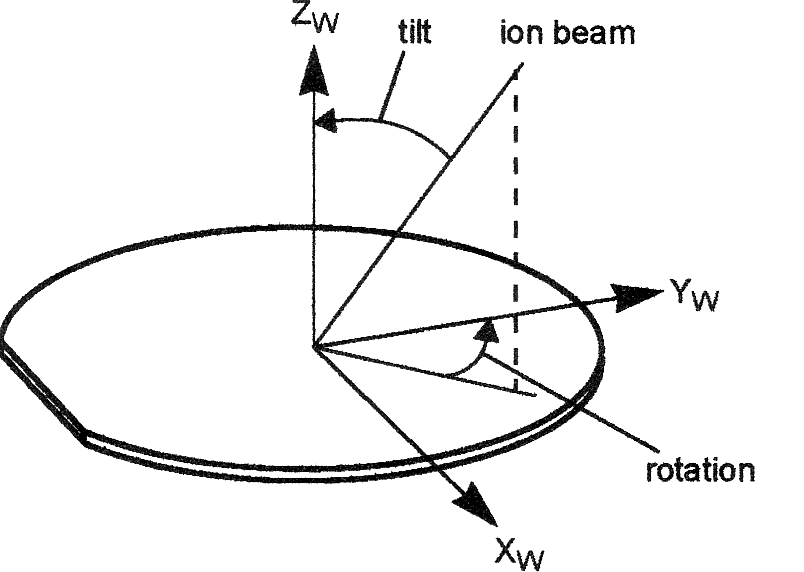
Рисунок 3.4 Определение углов Tilt и Rotation.
Угол Tilt может быть определен как угол между осями Z в первой и второй системах координат, т.е. между осями Z имплантера и подложки. Угол Rotation определяется как угол между проекцией оси Z имплантера на плоскость подложки и осью Y подложки. Положительным считается направление против часовой стрелки.
На рисунках 3.5 и 3.6 приведены два примера размещения подложки и сечений при различных сочетаниях параметров Tilt, Rotation и Cutline.
|
|
а) |
б) |

Рисунок 3.5 Системы координат, связанные параметрами Tilt=45º, Rotation= -90º и Cutline (0, 0, 0, 1): а – положение подложки, б – двумерное сечение.
|
|
а) |
б) |
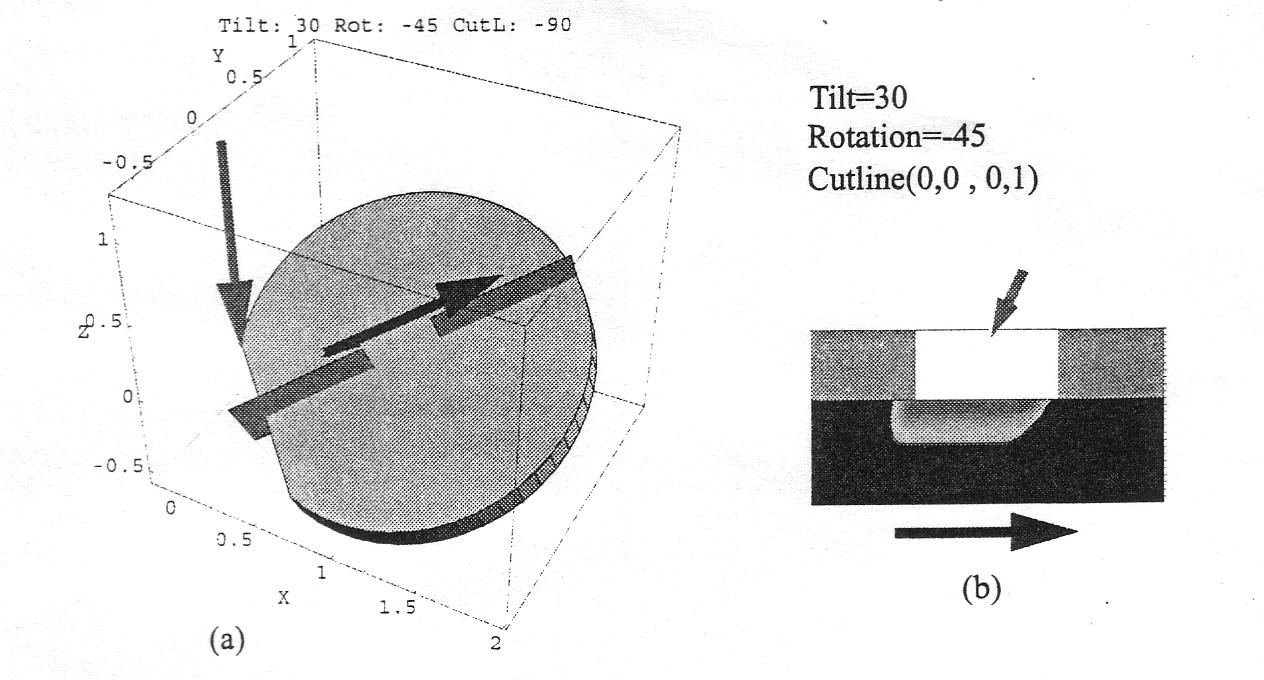
Рисунок 3.6 Системы координат, связанные параметрами Tilt=30º, Rotation= -45º и Cutline (0, 0, 0, 1): а – положение подложки, б – двумерное сечение.
Принцип суперпозиции при расчете функций распределения примеси.
Во время имплантации ионы внедряются в подложку через открытые участки внешней поверхности и рассеиваются внутри подложки в трех измерениях. Проекция ионного пучка в двумерной плоскости моделирования зависит от углов поворота и наклона подложки и может приводить к несимметричным профилям распределения примеси в окрестностях краев маски.
Предположим, что ионный пучок, падающий в точку внешней границы с координатами (ξ, η) создает в подложке функцию распределения Φ(x, y, ξ, η) (рисунок 3.7). Тогда в любой точке (x, y) внутри подложки концентрация примеси будет вычисляться как суперпозиция функций распределения, исходящих от всех точек падения ионного пучка, т.е. от всех точек внешней границы структуры:

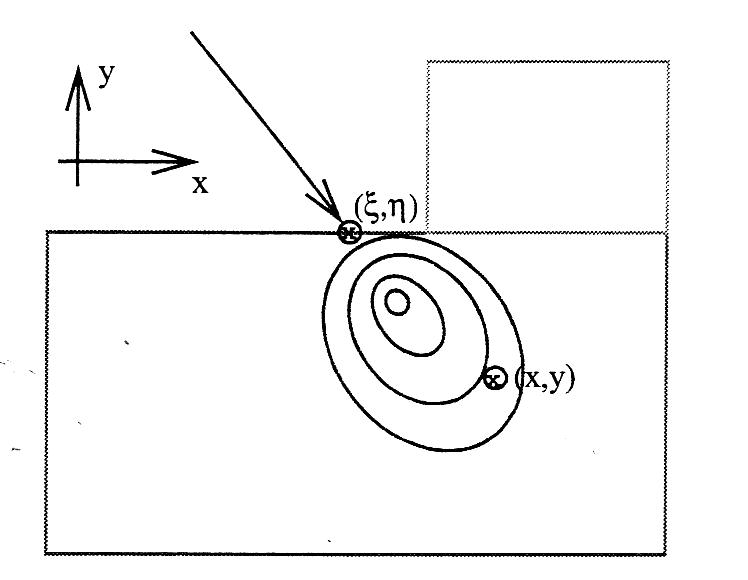
Рисунок 3.7 Распределение примеси вблизи краев маски
Для того чтобы сравнивать концентрацию имплантированных ионов с экспериментальными одномерными ВИМС – профилями, двумерный профиль представляется как произведение двух ортогональных функций: основной функции P(y) и латеральной функции L(x):
![]()
Моделирование имплантации методом Монте –Карло.
В современных системах моделирования наиболее точно распределение примеси при ионной имплантации рассчитывается с использованием метода Монте – Карло.
С помощью метода Монте – Карло моделируются физические события, происходящие при торможении отдельных частиц. Результатом моделирования торможения достаточно большого числа частиц является случайное распределение их траекторий. Для получения достоверных результатов требуется рассчитать, как правило, от 10 до 30 тысяч отдельных траекторий.
При использовании метода Монте - Карло необходимо задавать ориентацию кристаллографических осей относительно базового среза. Для стандартных подложек кристаллографическая ориентация координатных осей подложки приведена в таблице 3.1.
Таблица 3.1 Кристаллографическая ориентация координатных осей подложки
Ориентация подложки |
XW |
YW |
ZW |
100 |
<110> |
<110> |
<100> |
111 |
<211> |
<110> |
<111> |
Основной проблемой метода Монте – Карло является большая вычислительная трудоемкость. Поэтому важно оптимизировать время, затрачиваемое на вычисление каждой отдельной траектории. Это достигается, в основном, двумя способами:
выбором эффективных оценок для средней длины свободного пробега между столкновениями с учетом энергии частицы;
применением эффективных алгоритмов и аппроксимаций при вычислении угла рассеяния.
Для моделирования имплантации методом Монте – Карло создан специальный пакет CrystalTrim.
Аналитические аппроксимации распределения ионов. Функции Гаусса. В соответствии с классической теорией ЛШШ и диффузионной моделью Бирсака профили имплантированных ионов должны описываться гауссовскими распределениями. Аппроксимация распределения ионов по нормальному закону - распределение Гаусса является симметричным распределением и характеризуется двумя параметрами:
N(x)
=
![]()
![]() exp
exp
где
D – доза имплантированной примеси,
см-2,
![]() ,
,
![]() - средняя проекция пробега ионов и
среднеквадратичное отклонение проекции
пробега, соответственно. В таблице 3.2
приведены примеры значений параметров
,
для реальных профилей распределения
примеси.
- средняя проекция пробега ионов и
среднеквадратичное отклонение проекции
пробега, соответственно. В таблице 3.2
приведены примеры значений параметров
,
для реальных профилей распределения
примеси.
Таблица 3.2 Параметры функции распределения Гаусса
Энергия |
E = 20 кэВ |
E = 40 кэВ |
E = 100 кэВ |
|||
Примесь |
, нм |
, нм |
, нм |
, нм |
, нм |
, нм |
B |
79 |
32 |
153 |
50 |
344 |
83 |
P |
28.5 |
13 |
53 |
22 |
132 |
46 |
As |
18 |
7 |
30 |
11.5 |
62 |
22 |
Эксперименты показывают, что реальные профили асимметричны не только в кристаллических полупроводниках.
Если профиль слегка асимметричен, то достаточно еще одного параметра для адекватного описания, и можно использовать двойное сопряженное распределение Гаусса (асимметричное):
N(x)
=
где
![]() =
=
 ≈
≈
![]()
Распределения Пирсона-IV. Распределение Пирсона является решением дифференциального уравнения:
![]() ,
где
,
где
![]()
Функция распределения Пирсона-IV
N(x)
=
 ,
где
,
где
![]()
![]()
![]()
![]()
Функция распределения Пирсона-IV имеет 4 параметра, определяемые из первых четырех моментов
RP
= μ1
=
![]() –
средний проективный пробег, он же 1-ый
момент функции распределения;
–
средний проективный пробег, он же 1-ый
момент функции распределения;
![]() ;
i=2, 3, 4
;
i=2, 3, 4
σP = (μ2)1/2 – среднеквадратичное отклонение
![]()
- асимметрия;
![]()
эксцесс, характеризует плавность вблизи вершины.
Для распределения Пирсона IV моменты третьего и четвертого порядков удовлетворяют неравенству:
![]()
Если выполняется условие
![]() ,
,
то необходимо использовать распределение Пирсона – V
Если выполняется условие
![]() ,
,
то необходимо использовать распределение Пирсона – VI.
Максимум распределения Пирсона при γ = 0; лежит в точке RMAX = RP
NMAX = N(RP);
При γ < 0 пик находится глубже RP (RMAX > RP) и кривая распределения справа от максимума падает быстрее, чем слева.
При γ > 0 верно обратное утверждение (RMAX < RP)
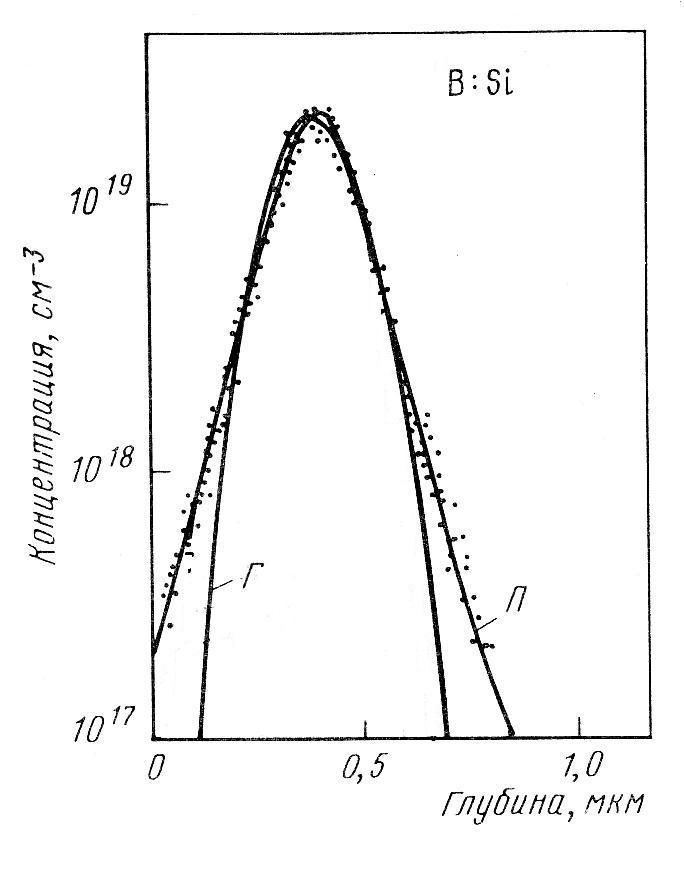
Рисунок 3.8 Сравнение распределений Гаусса и Пирсона с экспериментально полученными распределениями бора после имплантации с энергией E = 150 кэВ и дозой D = 5·1014 см-2
Аналитические аппроксимации распределения ионов, учитывающие сильную асимметрию и эффект каналирования.
Распределение Гаусса с обобщенным экспоненциальным «хвостом»:
N(x)
=![]()
![]()
где D – доза имплантированной примеси, 1/ см-3, , - средняя проекция пробега ионов и среднеквадратичное отклонение проекции пробега, соответственно; k – коэффициент, обеспечивающий непрерывность в точке x = + ; n0 – обратное значение нормы функции распределения, α, lexp – параметры распределения в «хвостовой» части.
Распределения Пирсона -IV с линейно- экспоненциальным хвостом:
N(x)
=
 ,
,
где
![]() -
распределение Пирсона –IV,
-
распределение Пирсона –IV,
![]() -
функция распределения в переходной
области,
-
функция распределения в переходной
области,
![]() -
функция распределения в "хвостовой
части",
-
функция распределения в "хвостовой
части",
![]() -
координата максимума функции распределения
Пирсона,
-
координата максимума функции распределения
Пирсона,
![]() ,
,
![]() -
координата точки, в которой концентрация
примеси равна половине максимального
значения,
-
координата точки, в которой концентрация
примеси равна половине максимального
значения,
![]() .
.
![]() ,
,
![]() ,
,
А и В определяются из условий непрерывности функции:
![]() и
и
![]() в
точке
в
точке
![]() ,
,
 ,
,
 .
.
Латеральное распределение примеси.
Латеральное распределение описывается функцией Гаусса со среднеквадратичным отклонением, зависящим от глубины.
f(x,y)
=
![]() exp
exp
Зависимость от глубины может быть описана с помощью вектора пяти параметров (p1…p5).