

4.3. Динамика систем обратной связи
В предыдущем параграфе мы пренебрегали тем обстоятельством, что простейшие управляемые объекты осуществляют функции усиления сигнала не мгновенно, а с некоторым запаздыванием. Практически в природе нет таких объектов, которые бы реагировали на управляющий сигнал мгновенно.
На рисунке 4.2 даны типичные зависимости усиленных сигналов xвых при скачкообразном включении входного сигнала xвх. Запаздывание реакции исполнительного органа на сигнал управления приводит к тому, что в системах с отрицательной обратной связью (рисунок 4.1) возникают побочные явления, нарушающие устойчивость. В неравновесной термодинамике они именуются детерминированным хаосом.
Лучше всего это понять на примере двух встречных пешеходов, случайно столкнувшихся на тротуаре и пытающихся разойтись. Пешеход, идущий с одной стороны, делает шаг вправо, пытаясь обойти случайно оказавшегося перед ним господина. Но тот, в силу замедленности реакции делает то же самое, т.е. шаг влево. Ситуация противостояния сохраняется. Теперь первый пешеход двигается влево. Его визави, поняв свою ошибку, тоже возвращается на прежнюю колею. Они вновь остаются друг против друга. Колебательные движения прекращаются
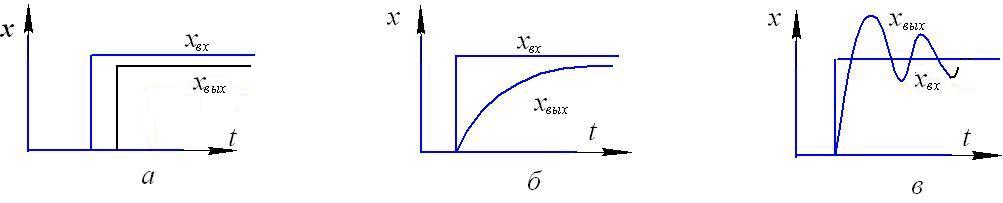
Рисунок 4.2.
Типичные зависимости выходных сигналов от времени: а- чистое запаздывание; б- экспоненциальное нарастание; в- гармоническая зависимость
только тогда, когда один из бедолаг изменит тактику – перестанет прыгать и остановится, или прыгнет в другую сторону, или (наихудший вариант) толкнет ни в чем не повинного случайного партнера. Ясно, что если бы реакция каждого пешехода, или хотя бы одного из них была моментальной, эта жуткая сцена не возникла.
То же самое возникает в природе, но с той разницей, что нет контролирующего органа, который бы прекратил бессмысленные блуждания.
Незатухающие автоколебания в системах обратной связи возникают при вполне определенных соотношениях между параметрами, характеризующими инерционность отдельных органов этих систем, и их коэффициентами усиления. Системы с незатухающими, особенно нарастающими автоколебаниями достаточно быстро разрушаются. В любом случае реализация передачи информации от эталонного к исполнительному органу сопровождается некоторым запаздыванием, в течение которого процесс протекает достаточно хаотично.
В теории автоматического управления описываются различные способы устранения этого хаоса и ускорение процесса окончательной передачи информации от источника эталонного (управляющего) сигнала к управляемому объекту. Наиболее эффективный способ – так называемая гибкая обратная связь. Суть ее сводится к тому, что параллельно общей цепочке – “измерительный орган (датчик) – орган сравнения – усилительный орган " – подключается орган гибкой обратной связи, сигнал на выходе которого пропорционален производной Рио (рисунок 4.1):
 (4.12,а)
(4.12,а)
В этом случае выходной сигнал исполнительного органа равен:
 (4.12,б)
(4.12,б)
Наличие дополнительного слагаемого, возникающего только при изменении Рио, т.е. при переходном процессе, позволяет ускорить наступление стационарного режима.Коэффициент Кг.о.с. может быть отрицательным. В этом случае процесс установления замедляется, зато протекает плавно, без сильных выплесков Рио в переходный период.