

4.2. Принцип устройства и действия систем отрицательной обратной связи
На рисунке 4.1 изображена структурная схема простейшей управляющей системы с отрицательной обратной связью.
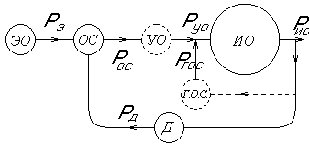
Рисунок 4.1.
Структурная схема управляемой системы обратной связи: ИО(ОР) - исполнительный орган (объект регулирования); Д - измерительный орган (датчик); ОС - орган сравнения; ЭО - эталонный орган (память); УО - усилительный орган; ГОС – гибкая обратная связь.
Как видим, эта система состоит из пяти объектов. Каждый объект представляет собой диссипативную систему, порядок в которой устанавливается путём передачи информации от другого, предшествующего по схеме объекта.
Первый из них – исполнительный орган - объект регулирования. Энергия этого объекта по сути дела – энергия всей системы. Поскольку речь идет о высокоупорядоченной диссипативной системе, обычно рассматривается мощность, т.е. энергия, отнесенная к единице времени. Тоже относится и к остальным элементам системы. Управление этим исполнительным органом, т.е. повышение порядка его мощности Рио, осуществляет орган управления, состоящий из измерительного органа (датчика) – Д, эталонного органа (памяти) – ЭО, органа сравнения – ОС и усилительного органа – УО.
Носителем порядка рассматриваемой системы является эталонный орган. Его выходная мощность Рэ значительно меньше Рио, зато содержит значительно больше порядка (информации). Этот порядок накапливался в предшествующий временной период. Как уже указывалось выше (см.§3.7),такое накопление именуется запоминанием, поэтому ЭО является памятью. Очевидно, необходимо, чтобы Рио было пропорционально Рэ, тогда степень упорядоченности исполнительного органа будет такой же, как эталонного. Ниже будет показано, при каких условиях это требование выполняется.
Следующий элемент системы обратной связи – измерительный орган (датчик). Он служит для того, чтобы преобразовать информацию о реальном значении Рио. в пропорциональную ей, но значительно меньшую по величине мощность Рд. Например, скорость самолета измеряется с помощью датчика, приводимого в действие частью потока встречного воздуха. Скорость автомобиля определяется с помощью спидометра, отбирающего часть мощности у системы, приводящей во вращение оси колес.
Орган сравнения осуществляет вычитание сигнала измерительного органа Рд из сигнала эталонного органа Рэ. Это - узловой орган всей системы. На выходе этого органа осуществляется движение, мощность которого Рос пропорциональна разности (Рэ – Рд).
Усилительный орган существенно усиливает сигнал органа сравнения. Иными словами, мощность сигнала на выходе усилительного органа Руо пропорциональна и во много раз больше мощности сигнала Рос. Главная задача усилительного органа – скомпенсировать уменьшение сигнала измерительным органом.
Во многих технических устройствах управления в качестве входных и выходных сигналов, т.е. истоков и стоков информации, выбирают не мощность, а другие физические величины, связанные с мощностью, – температуру, давление, скорость, силу тока, напряжение и т.п. [45].
Рассмотрим, как прямо пропорциональная зависимость Рио от Рэ осуществляется.
Составим уравнения, характеризующие работу каждого органа.
Выходной сигнал
исполнительного органа представляет
собой линейную комбинацию двух сигналов
– Руо
и
 (неупорядоченный
остаток энергии):
(неупорядоченный
остаток энергии):
 ,
(4.1)
,
(4.1)
Величина δP – стохастическое (случайное) слагаемое мощности исполнительного органа, обусловленное воздействием на систему внешних факторов. Она меньше первого слагаемого:
 (4.2)
(4.2)
Коэффициент Kио именуется коэффициентом усиления исполнительного органа. Он существенно больше единицы:
 .
(4.3)
.
(4.3)
Уравнения связи измерительного, усилительного органов и органа сравнения следующие:
 (4.4)
(4.4)
 ;
Kуо>>1;
(4.5)
;
Kуо>>1;
(4.5)
 ;
Kос
>1;
(4.6)
;
Kос
>1;
(4.6)
где Кд, Куo и Кос - коэффициенты усиления измерительного, усилительного органов и органа сравнения.
Коэффициент усиления усилительного органа Куо обычно такой, что:
 (4.7)
(4.7)
Если произведение Кио Кос значительно больше 1/Кд , то цепочка рис. 4.1 может сформироваться и без усилительного органа.
Подставив (4.4), (4.5), (4.6) в (4.1) и исключив Рд, Руo и Рос., получим:
 .
(4.8)
.
(4.8)
Разделив правую
и левую часть (5.8) на коэффициент
 :
:
 . (4.9)
. (4.9)
Соотношение (4.7) позволяет отбросить последнее слагаемое:
 .
(4.10)
.
(4.10)
Как видим, действительно, система рисунка 4.1 позволяет сформировать движение с большой мощностью, обладающей той же информацией, что и у эталонного сигнала малой энергии.
Убедимся теперь, что система рисунка 4.1 - устойчивая. Для этого допустим, что под влиянием внешних факторов(т.е. не относящихся к элементам системы 4.1)величина δP увеличилась на Рио. Согласно (4.4) Рд увеличится на Рд.Зато Рос уменьшится на Рос, так как в (4.6) Рд является вычитаемым. Вслед за Рос уменьшится на Руо величина Руо, а за ней и Pио. Итак, увеличение выходной мощности системы Рио вызывает внутри неё движение, возвращающее Рио в исходное положение.