

Моделирование основных режимов суэп, оценка динамических и статических показателей системы.
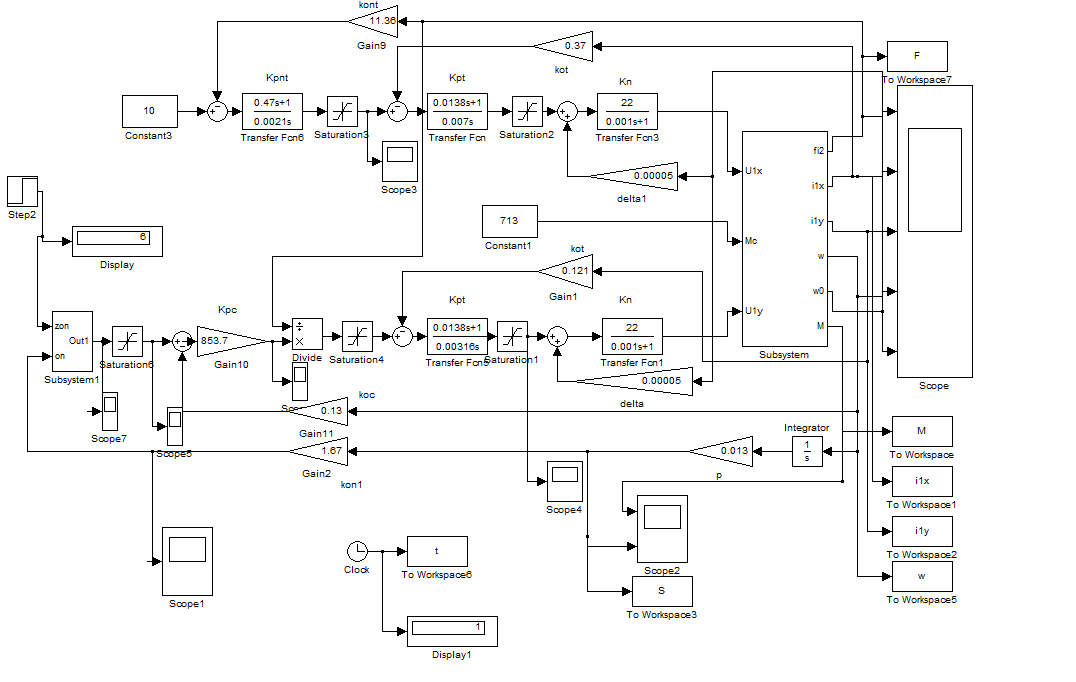
Рисунок 4.3 – Структурная схема модели СУЭП в среде MatLab.
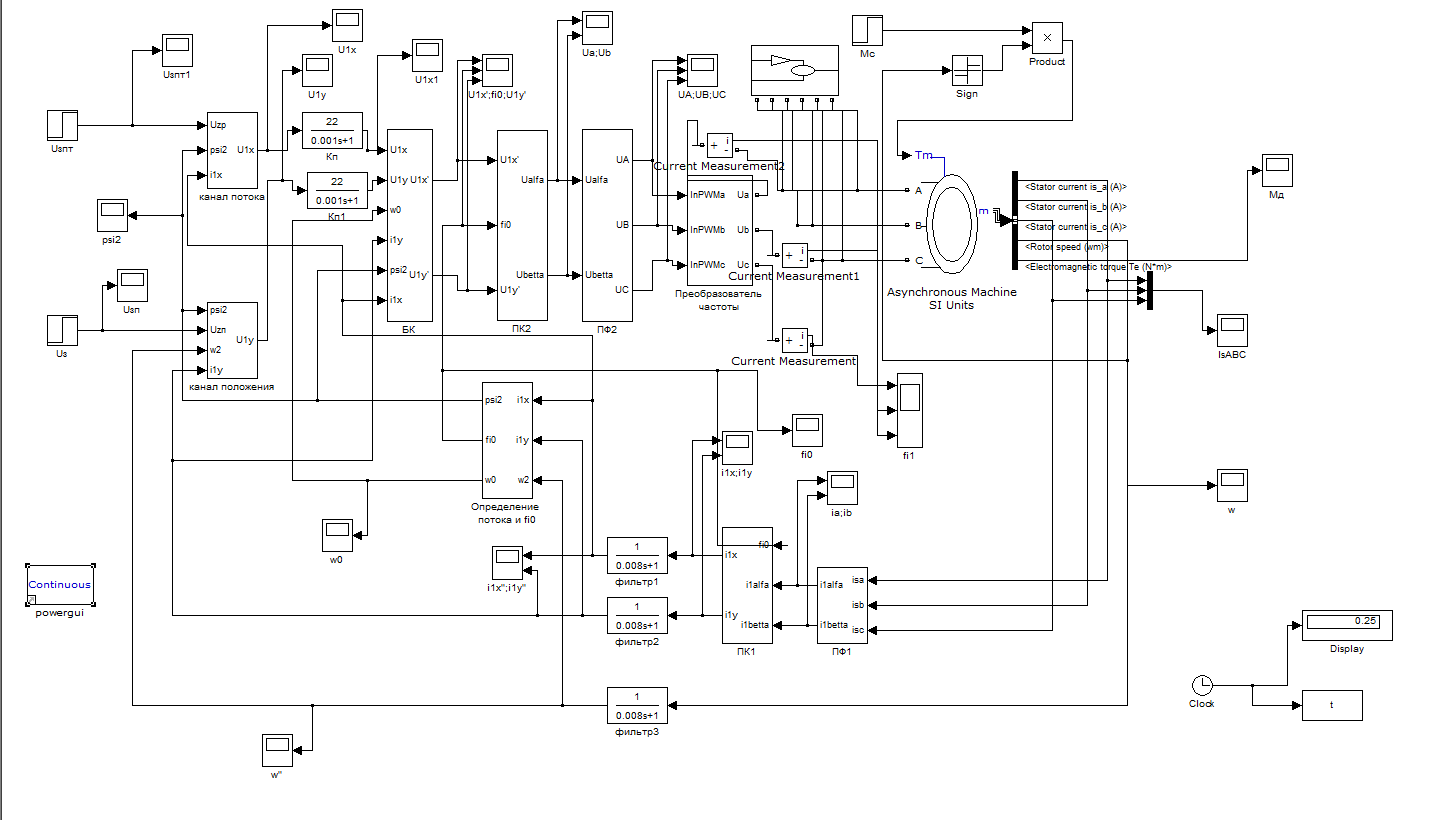
Рисунок 4.4 – Структурная схема модели СУЭП в среде MatLab.
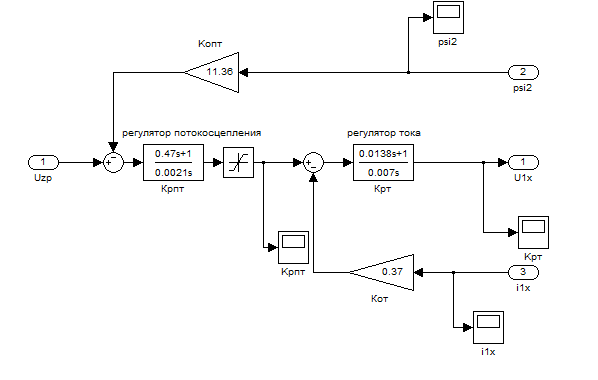
Рисунок 4.5 -Структурная схема модели канала потока
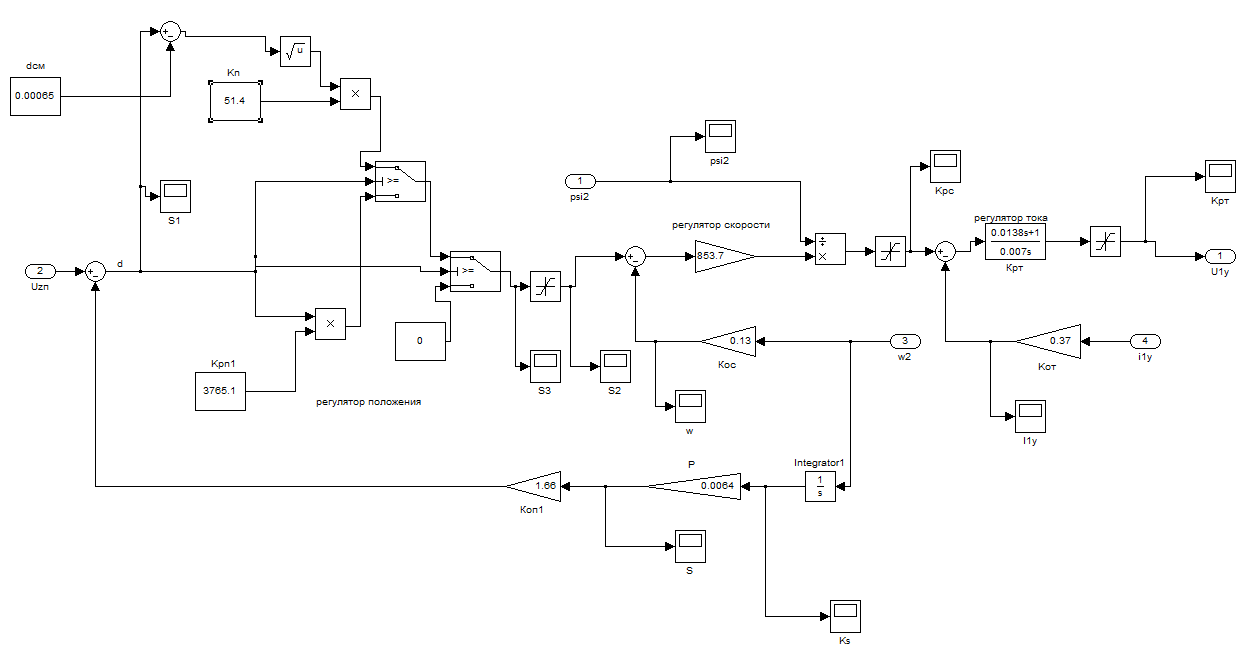
Рисунок 4.6 - Структурная схема модели канала положения
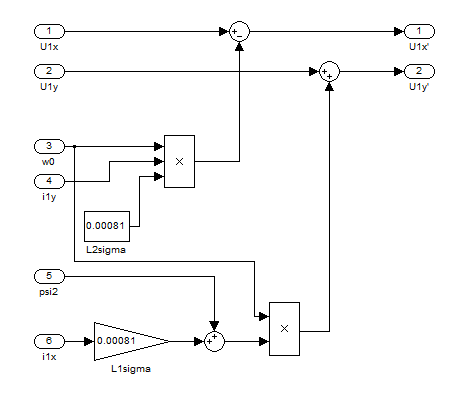
Рисунок 4.7 - Структурная схема модели блока контроля
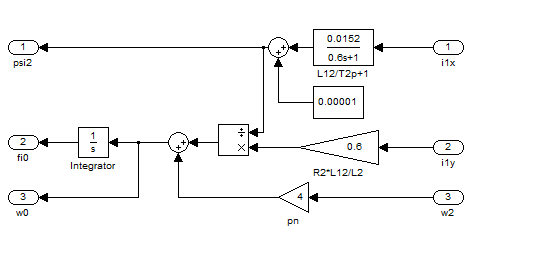
Рисунок 4.8 - Структурная схема модели определения потока
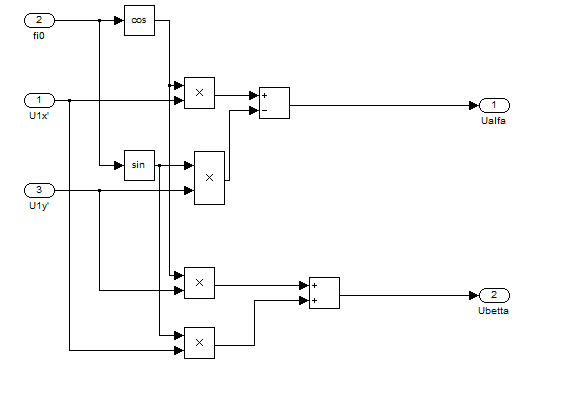
Рисунок 4.9 - Структурная схема модели преобразователя координат ПК2
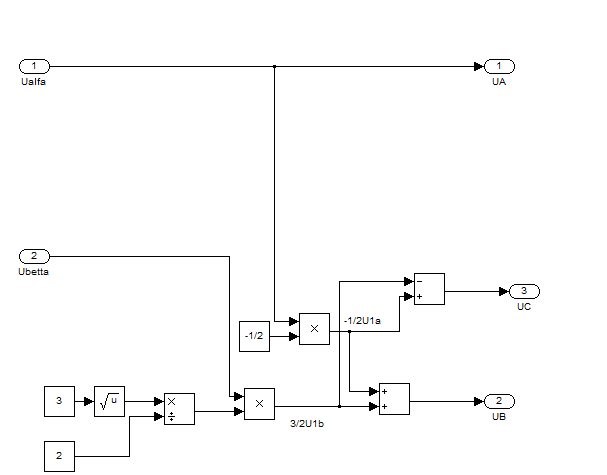
Рисунок 4.10 - Структурная схема модели преобразователя фаз ПФ2
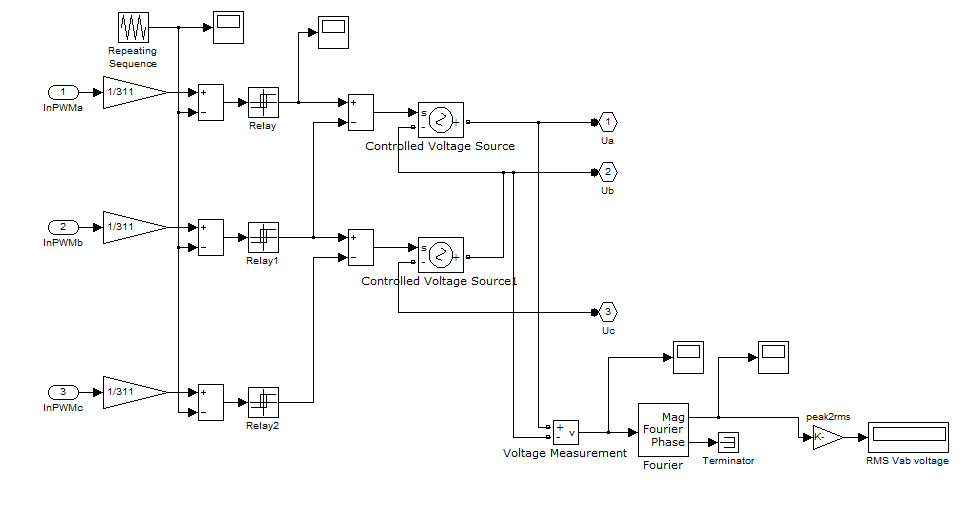
Рисунок 4.11 - Структурная схема модели преобразователя частоты
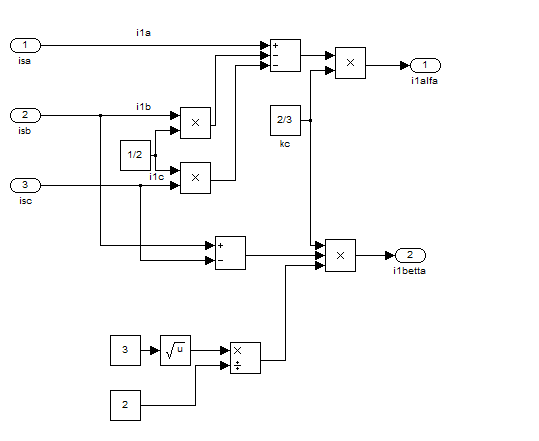
Рисунок 4.12 - Структурная схема модели преобразователя фаз ПФ1
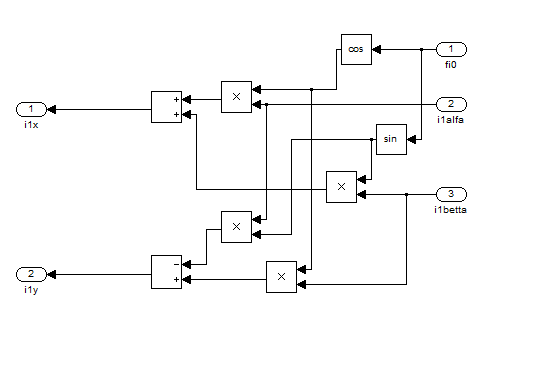
Рисунок 4.13 - Структурная схема модели преобразователя координат ПК2
В результате моделирования были получены графики переходных процессов, которые изображены на рисунках 4.14 - 4.17.
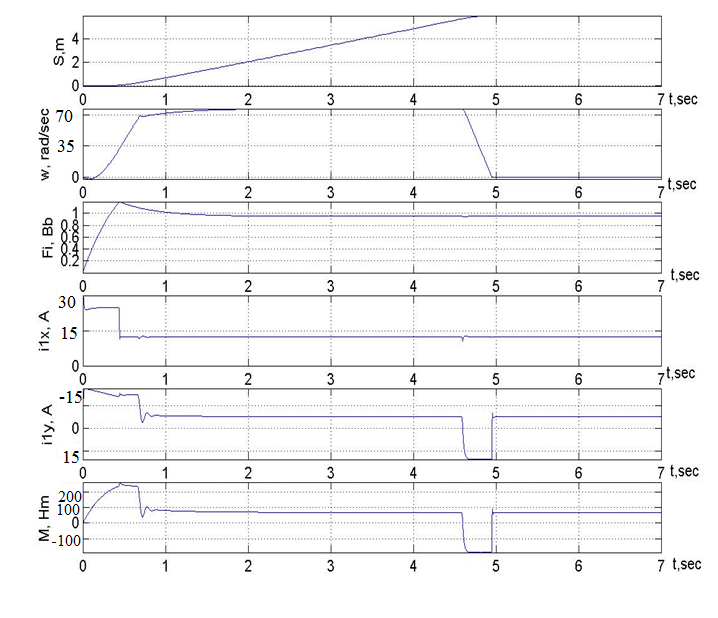
Рисунок 4.14– Графики S(t), ω(t), Ψ2(t), i1x(t), i1y(t), M(t) при отработке максимального перемещения 6 (м) при минимальном статическом моменте Мст=713Нм.
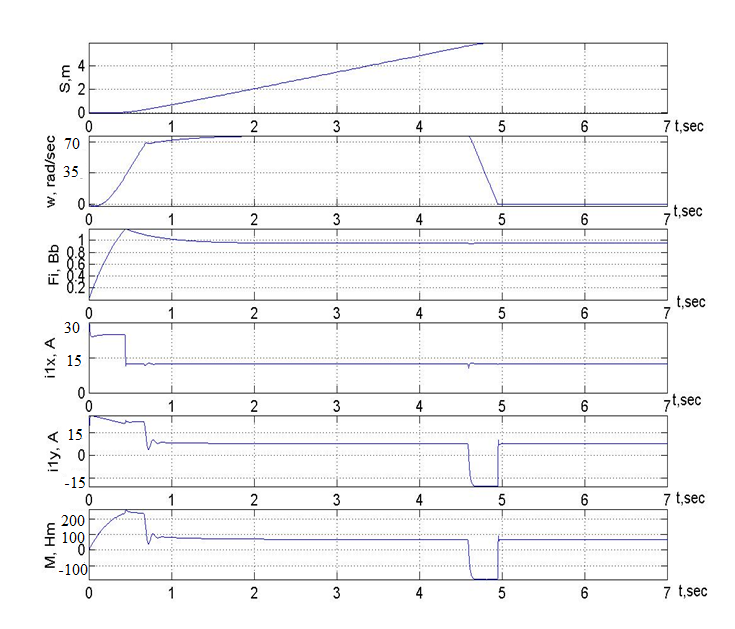
Рисунок 4.15 – Графики S(t), ω(t), Ψ2(t), i1x(t), i1y(t), M(t) при отработке максимального перемещения 6 (м) при максимальном статическом моменте Мст=830Нм.
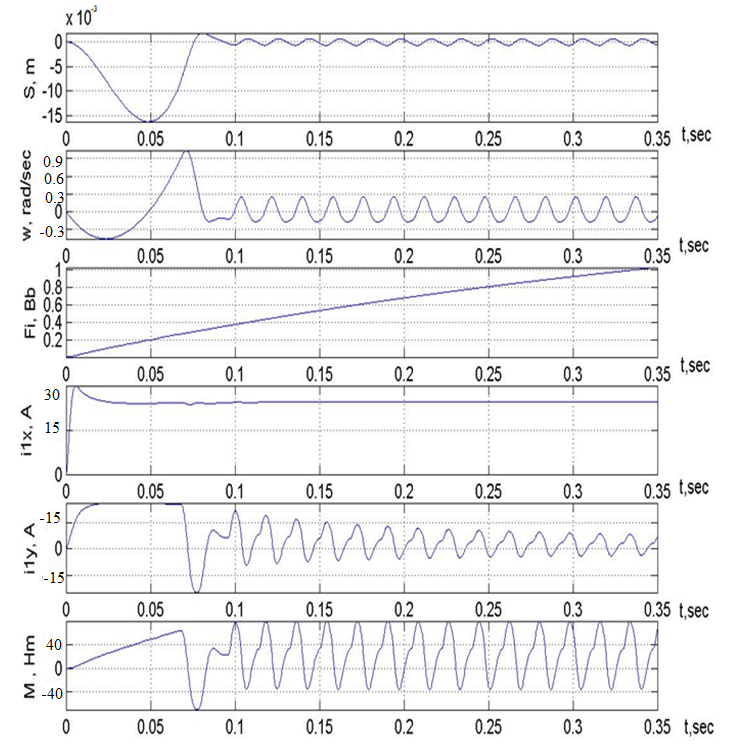
Рисунок 4.16 – Графики S(t), ω(t), Ψ2(t), i1x(t), i1y(t), M(t) при отработке минимального перемещения 0,0001 (м) при минимальном статическом моменте Мст=713Нм.

Рисунок 4.17 – Графики S(t), ω(t), Ψ2(t), i1x(t), i1y(t), M(t) при отработке минимального перемещения 0,0001 (м) при максимальном статическом моменте Мст=830Нм.
Результатом моделирования является определение установившейся ошибки системы и, следовательно, подтверждение правильности выбора типа синтезированной САУ. График, иллюстрирующий характер изменения ошибки представлен на рисунке 4.10:
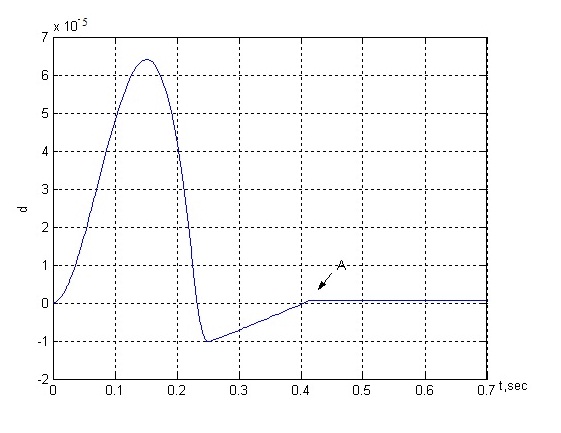
Рисунок 4.18 – График изменения ошибки в переходном процессе.

Рисунок 4.19 – График изменения ошибки в переходном процессе при увеличении в точке «А».

Рисунок 4.20 – График изменения сигнала с выхода регулятора положения.
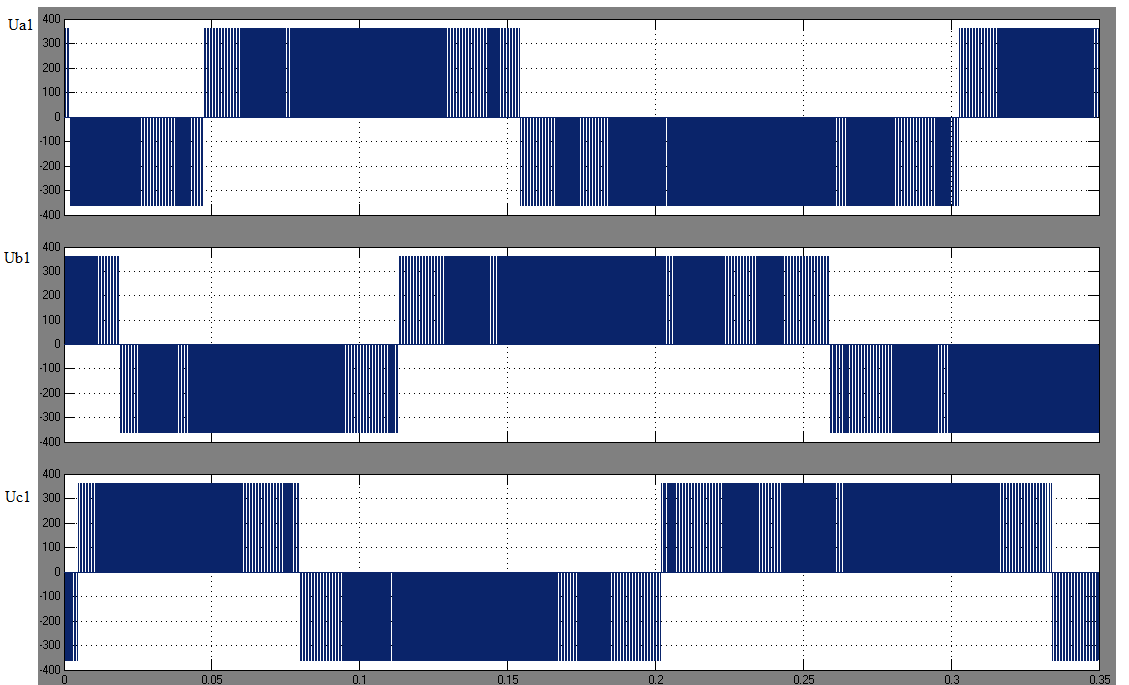
Рисунок 4.21 – График момента подачи напряжения на фазы обмотки статора АД.
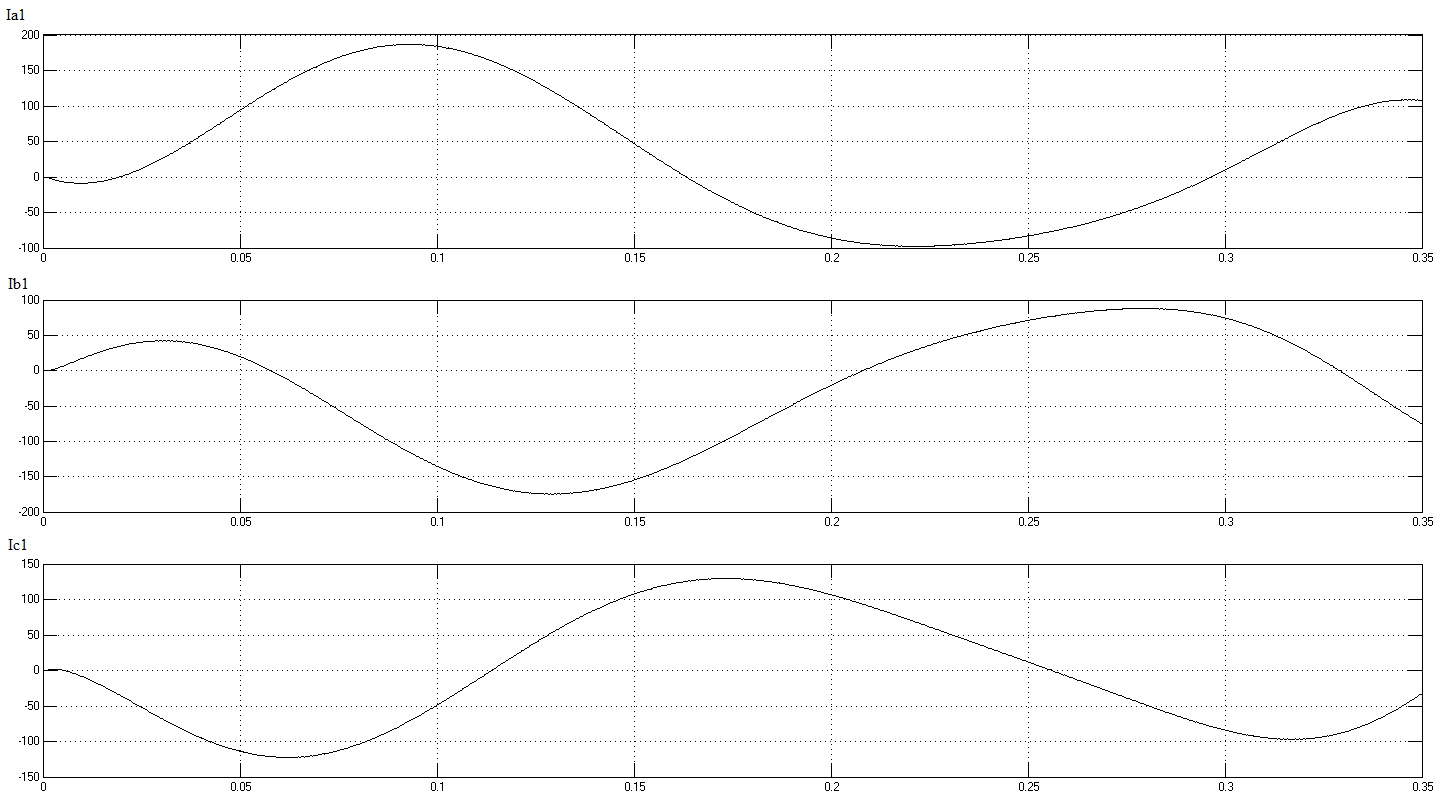
Рисунок 4.22 – График протекания токов через фазы обмотки статора АД.
Система отрабатывает
заданный диапазон перемещений (0,0005-6)
м. Статическая ошибка при переходном
процессе равна при
допустимой по заданию
при
допустимой по заданию , что удовлетворяет критерию качества
позиционирования системы управления.
, что удовлетворяет критерию качества
позиционирования системы управления.
ПРОЕКТИРОВАНИЕ ДИСКРЕТНОЙ ЧАСТИ СИСТЕМЫ УПРАВЛЕНИЯ, ЗАШИТЫ И СИГНАЛИЗАЦИИ
В проектируемой системе электропривода возможно применение различных видов защиты, которые при изменении определенных условий или недопустимых режимах работы привода выполняют отключение силовой части, исключая выход из строя электрооборудования, а значит, повышая надёжность схемы. Защита электроприводов с двигателями малой и средней мощности напряжением питания до 1000 В выполняется простой и не дорогостоящей.
Защита должна обеспечить:
Локализацию аварийной ситуации.
Исключение аварийной ситуации при возникновении условий.
В электроприводах применяются следующие виды защиты:
1) Максимальная токовая защита – должна за минимальное время отключать защищаемую цепь при возникновении сверхтоков (токов К.З.).
2) Защита от перегрузки двигателя, тепловая защита.
3) Нулевая защита.
4) Защита от обрыва фазы.
5) Защита от перенапряжений.

Использование автоматического выключателя позволяет не только защитить двигатель от кратковременных бросков тока, но и осуществить отключение двигателя при потреблении излишнего тока, т.е. при перегрузке двигателя за счет наличия в автоматическом выключателе электротеплового расцепителя. При возникновении аварийного режима, максимальная токовая защита отключает потребителя от сети.
Тепловая защита – обеспечивает защиту двигателя от перегрузки (перегрева). В повторно-кратковременных режимах работы электропривода, когда характеристики нагрева реле и двигателя различны, защита двигателя от перегрузки осуществляется с помощью максимально-токовых реле KK1..2. В качестве таких реле используется реле типов РЭ570 и РЭ70. Контакты реле включаются в цепь катушки линейного контактора.
Плавкие предохранители включаются между контактами линейного контактора и выключателя напряжения сети, чтобы производить замену предохранителей в обесточенной цепи.
Нулевая защита – обеспечивает защиту от самопроизвольного включения двигателя при чрезмерном снижении (более 20%-30%) или кратковременном исчезновении напряжения питающей сети. Как правило, повторный запуск должен осуществляться только при подаче соответствующей команды оператором. Защита осуществляется линейными контакторами «КМ». В схемах с линейными контактами при питании силовых схем и схем управления от одной питающей сети с управлением от кнопок, контроль напряжения осуществляет сам контактор. Пониженное напряжение приводит к перегреву двигателя, нарушению работы логической схемы и возникновению аварийного режима в установке, создание опасности для персонала.
Краткое описание работы схемы
Принцип работы в следующем: включается автоматический аппарат, подается напряжение на систему управления. При нажатии на SB1 подается питание на реле КМ1.
Появляется индикация о подачи питания на систему управления (лампочка HL1).
Размыкается размыкающий контакт КМ1,отключая реле KV1.Через выдержку времени обусловленную резистором R и конденсатором С замыкается размыкающий контакт KV1. Подается питание на реле КМ2 замыкаются контакторы относящиеся к данному реле, подключая основную силовую систему. Появляется индикация о подачи питания на основную силовую часть ЭП (лампочка HL2).Нажатие SB3 приводит в движение ЭП в прямом направлении, а SB4— в обратном направлении. Одновременное нажатие SB3 и SB4 исключено.При нажатии SB3 или SB4 срабатывает реле КМ4 и снимается тормоз.
ЗАКЛЮЧЕНИЕ
В результате выполнения проекта был произведен расчет системы электропривода используемой для отработки заданных перемещений. Также выполнен синтез САУ для заданной системы. Разработанная САУ соответствует требованиям задания.
Кроме того, в результате детального анализа выбрана функциональная схема, проведен синтез регуляторов и расчёт основных соотношений, составлена полная структурная схема, на основании которой была собрана имитационная модель системы. Созданные программными средствами модели дают возможность наблюдать переходные процессы в приводе и позволяют определить правильность при выборе системы и расчета ее параметров.
Таким образом, в ходе выполнения курсового проекта были выполнены все требуемые условия, а именно, отработка перемещения (0-6) м при допустимой статической ошибке 0,5мм.