

3.2 Математическое описание объекта управления
Для синтеза системы
векторного управления фазные величины
трёхфазной машины преобразуют к
соответствующим величинам эквивалентной
двухфазной машины. В ортогональных
неподвижных координатных осях
 ,
,
 вместо трёх фазных величин
вместо трёх фазных величин
 ,
,
 ,
,
 получим две проекции вектора
получим две проекции вектора
 на координатные оси
на координатные оси

Аналогичное преобразование выполняется для токов и потокосцеплений. Для синтеза системы переменные преобразуются к координатной системе (х, у), вращающейся со скоростью потокосцепления ротора ω0:
 ;
;
 .
.
В этих координатах электромагнитные процессы асинхронного двигателя с короткозамкнутым ротором описываются дифференциальными уравнениями








Первые два уравнения
записаны для статорной, а вторые два –
для роторной цепи. Здесь
 ,
,
 – сопротивления фазных обмоток статора
и ротора;
– сопротивления фазных обмоток статора
и ротора;
 ,
,
 – составляющие потокосцепления статора
по осям
– составляющие потокосцепления статора
по осям
 ,
,
 ;
;
 – потокосцепление ротора;
– потокосцепление ротора;
 – частота вращения напряжения статора;
– частота вращения напряжения статора;
 ,
,
 – угловая скорость ротора;
– угловая скорость ротора;
 – число пар полюсов.
– число пар полюсов.
Из уравнений потокосцеплений выразим составляющие тока ротора и потокосцепления статора:
 ;
;
 ;
;
 ;
;
 .
.
Здесь:


В результате преобразований третье уравнение системы принимает вид:

Для цепи статора получаются уравнения
 ;
;

Синхронная частота удовлетворяет выражению:

Скорость вращения
координатной системы, используемая для
координатных преобразований,
 .
Электромагнитный момент определяется
выражением:
.
Электромагнитный момент определяется
выражением:


Скорость ротора удовлетворяет дифференциальному выражению:

Здесь
 – момент сил сопротивления,
– момент сил сопротивления,
 – момент инерции.
– момент инерции.
В соответствии с приведенными выше выражениями составим структуру ОУ в осях х, у. Изобразим ее на рисунке 3.2.1.
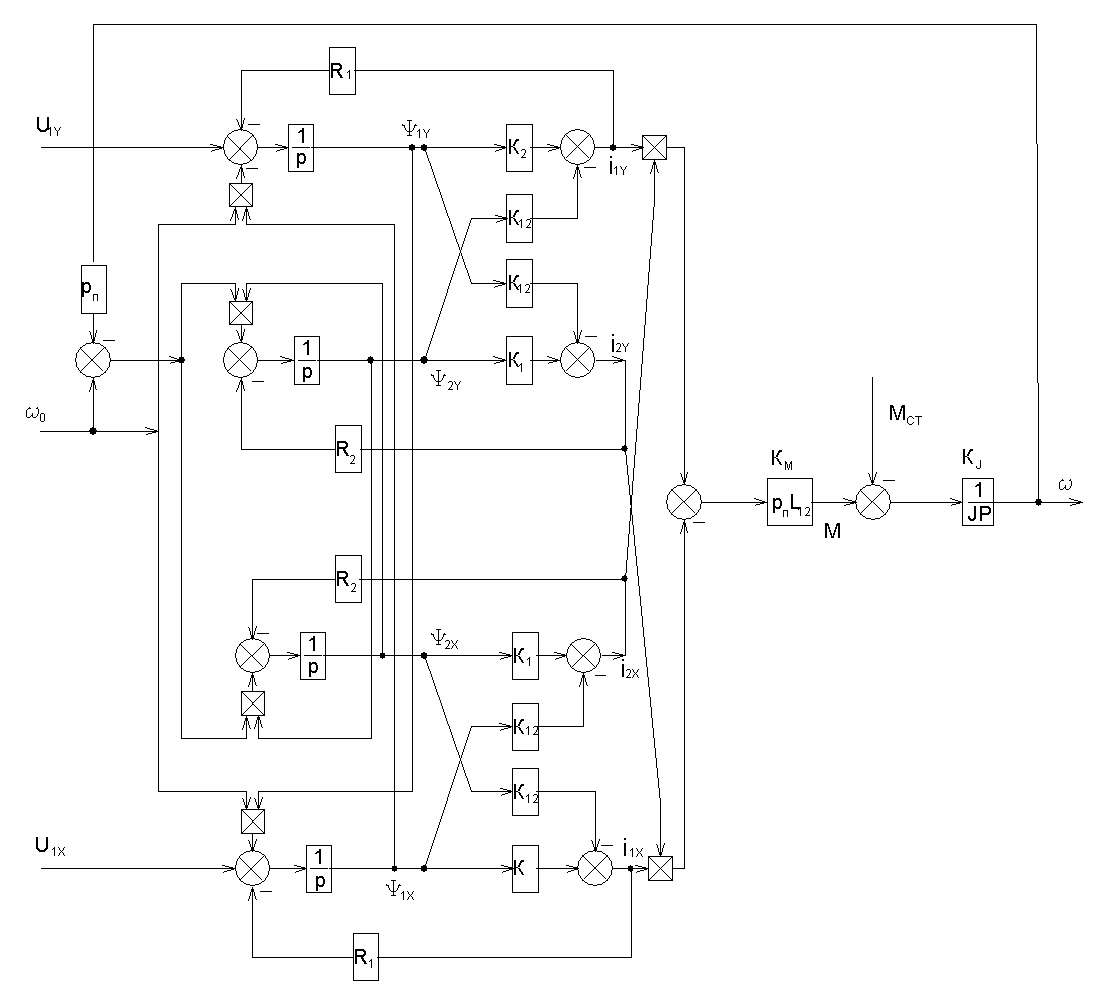
Рисунок 3.2.1 – Структурная схема АД в осях х-y.
Для синтеза системы
переменные преобразуем к координатной
системе (x,
y),
вращающейся со скоростью потокосцепления
ротора
 .
Тогда
.
Тогда
 .
.
Разрешив уравнения равновесия напряжений относительно потокосцеплений, и переходя к операторному описанию, получим:

При подстановке (3.2.1) в полученные выше дифференциальные уравнения получаем следующую систему уравнений:
 (3.2.2)
(3.2.2)
В результате преобразований третье и четвёртое уравнения системы (3.2.2) принимают вид:
 (3.2.3)
(3.2.3)
Для цепи статора подстановкой (3.2.3) в первые два уравнения (3.2.2) получаем:
 (3.2.4)
(3.2.4)
Линеаризованную структуру ОУ представим на рисунке 3.2.2

.
Рисунок 3.2.2 – Структурная схема асинхронного двигателя при векторном управлении
3.3 Определение передаточных функций и звеньев объекта управления.
Произведем расчет параметров структурной схемы объекта управления, которая была составлена в предыдущем пункте.
Предварительно находим величину эквивалентной индуктивности и эквивалентного сопротивления:
 (3.3.1)
(3.3.1)
 (3.3.2)
(3.3.2)
Структурная схема
объекта управления содержит два канала:
канал
,
на входе которого действует управление
 ,
и канал
,
и канал
 со входным сигналом
со входным сигналом
 .
Выходными величинами являются
потокосцепления
.
Выходными величинами являются
потокосцепления
 для канала
для канала
 и скорость ротора
для канала
.
На схеме объекта управления приняты
обозначения:
и скорость ротора
для канала
.
На схеме объекта управления приняты
обозначения:
 (3.3.3)
(3.3.3)
 (3.3.4)
(3.3.4)
Основой этой структуры объекта является управляемый от преобразователя асинхронный двигатель. Структура содержит в каналах и динамические звенья, учитывающие электромагнитные процессы в цепи статора. Рассчитаем передаточную функцию данных звеньев по формуле (3.3.5):
 (3.3.5)
(3.3.5)
Коэффициент
передачи между моментом
 и током
и током
 определяется по формуле (3.3.6):
определяется по формуле (3.3.6):
 (3.3.6)
(3.3.6)
Передаточная
функция звена, преобразующая ток статора
 в потокосцепление
имеет вид:
в потокосцепление
имеет вид:
 (3.3.7)
(3.3.7)
Передаточная функция интегрирующего звена, определяемая уравнением движения и преобразующая динамический момент в скорость:
 (3.3.8)
(3.3.8)
где и – момент статический и момент инерции системы, приведенной к валу двигателя. Из уравнения (3.3.8) получим:
 (3.3.9)
(3.3.9)
В главной цепи
контура регулирования потокосцепления
ротора кроме звена
 ,
включается звено
,
включается звено
 :
:
 (3.3.10)
(3.3.10)
Синхронная скорость двигателя может быть определена из уравнения:
 (3.3.11)
(3.3.11)
 (3.3.12)
(3.3.12)
На выходе
 получается величина ЭДС пропорциональная
произведению потокосцепления на
скорость. Величина потокосцепления
определяется из выражения:
получается величина ЭДС пропорциональная
произведению потокосцепления на
скорость. Величина потокосцепления
определяется из выражения:
 (3.3.13)
(3.3.13)
 (3.3.14)
(3.3.14)
Помимо главных цепей системы регулирования потокосцепления и скорости на структурной схеме двигателя изображены внутренние связи.