

1.Описание работы машины и исходные данные для проектирования.
Строгальный станок предназначен для строгания поверхностей. Движение от электродвигателя через зубчатый редуктор передаётся кривошипу 1 кривошипно-ползунного механизма, который осуществляет возвратно-поступательное перемещение ползуна 3 с резцовой головкой, в которой закреплён резец. Строгание металла происходит при движении ползуна слева направо.
Подача стола с заготовкой осуществляется кулачковым механизмом через систему рычагов.
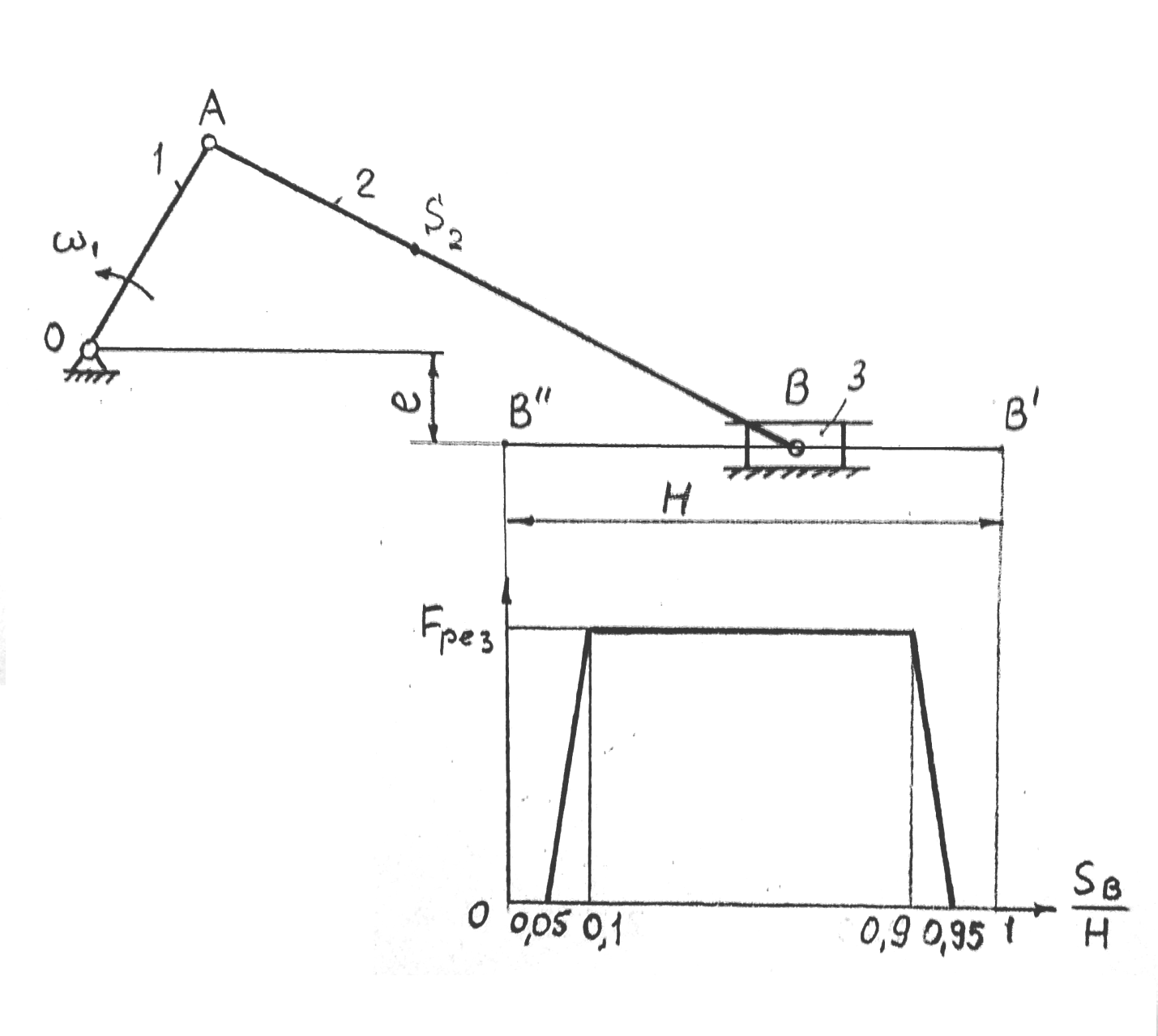
Рис. 1
Исходные данные: Н – ход ползуна; λ=loa/lab; kv – коэффициент изменения средней скорости ползуна; n1 – частота вращения кривошипа; F3max – максимальная сила полезного сопротивления; ψмах - угловой ход коромысла кулачкого механизма; lk – длина коромысла; φу=φв; φдс=0.3φу – фазовые углы поворота кулачка.
lAS =0.35 lAB.
Массы звеньев: m2=q lab, где q=80 кг/м; m3=3 m2; m1=0,5 m2.
Моменты инерции звеньев: IS =0,1 кг м2; IS =0,17 m2 l2ab
Моменты инерции ротора двигателя и всех зубчатых колёс, приведённый к валу двигателя, Ip=0,05 кг м2.
Частота вращения вала двигателя nд=950 об/мин.
Коэффициент неравномерности движения δ=0,05
Максимальный достигнутый угол давления в кулачковом механизме θmax=30°.
Законы движения толкателя: при удалении - №4, при возвращении - №5.
Остальные данные приведены в таблице 1.
Таблица 1 – исходные данные.
|
Вариант |
Н, м |
λ |
Kv, м |
n1, об/мин |
Fрез, кН |
h, м |
φy=φв, град |
|
2 |
0,22 |
0,238 |
1,04 |
110 |
10 |
0,07 |
90 |
|
|
2.Динамический синтез и анализ машины в установившемся режиме движения.
2.1.Задачи динамического синтеза и анализа машины.
Динамический
синтез машины по коэффициенту
неравномерности движения δ состоит в
определении такой величины постоянной
составляющей приведенного момента
инерции
 ,
при которой колебания скорости звена
приведения не выходят за пределы,
устанавливаемые этим коэффициентом.
Обычно это достигается установкой
дополнительно вращающейся массы,
выполняемой в виде маховика.
,
при которой колебания скорости звена
приведения не выходят за пределы,
устанавливаемые этим коэффициентом.
Обычно это достигается установкой
дополнительно вращающейся массы,
выполняемой в виде маховика.
Динамический
анализ машины состоит в определении
закона движения звена приведения в виде
1(φ1)
и ε1(φ1)
при постоянном значении
 .
.
Блок-схема исследования динамической нагруженности машины показана на рис.2.
Силовой расчет
Кинематический анализ


Динамический анализ исполнительного механизма


Определение закона движения звена приведения и коэффициента динамичности
Динамический анализ машины





FПС

Динамический синтез машины по коэффициенту неравномерности вращения δ
Определение динамических характеристик машины

Определение координат крайних положений рабочего звена и соответствующих им значений обобщенной координаты
Определение кинематических характеристик исполнительного механизма
Определение функций положений, аналогов скоростей и ускорений
Рис. 2
2.2.Определение размеров, масс и моментов инерции звеньев рычажного механизма.
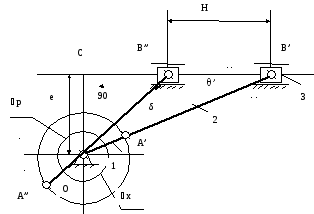
Рис. 3
Из формулы
находим

Изображаем схему механизма в крайних положениях OA΄B΄иOA΄΄B΄΄. Из ∆OB΄B΄΄имеем
 ,
,
откуда, учитывая, что
 ,
находим
,
находим

тогда
Из ∆OB΄C
 ,
,
а из ∆OB΄B΄΄
 ,
,
откуда
 .
.
В результате находим


Координата центра масс шатуна S2:

Массы звеньев:
 кг
кг
 кг
кг
 кг
кг
Силы тяжести звеньев:
 H
H
 H
H
 H
H
Момент инерции звеньев:



Приведенный момент инерции вращающихся звеньев (без маховика):

Средняя угловая скорость кривошипа 1:

Обобщенная
координата механизма
 в крайнем наиболее удаленном положении
ползуна 3 (рис. 4):
в крайнем наиболее удаленном положении
ползуна 3 (рис. 4):

x
l1 e
ϕ0
l2
Рис. 4
